
路面整修机以及用于找平熨平板的方法.pdf

是丹****ni


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

路面整修机以及用于找平熨平板的方法.pdf
本发明涉及路面整修机,包括:用于在底土上产生摊铺层的熨平板,路面整修机在底土上在铺设方向上沿着铺设部分移动,其中熨平板是高度可调的并且具有在前牵引点处通过找平缸固定到路面整修机上的牵引臂;至少一个测量装置;存储装置;控制系统;和闭环控制器装置,其连接到控制系统以调整找平缸的设置,控制系统响应于测量装置相对于底土和/或相对于参考物所执行的距离测量,计算校正值,可在铺设方向上位于熨平板的前边缘的前面的测量点处执行该距离测量,以至少暂时地将校正值存储在存储装置中并随着继续的铺设操作,考虑所存储的校正值,对测量点

用于控制具有齿轮的路面整修机的方法和具有齿轮的路面整修机.pdf
本发明涉及一种用于控制路面整修机(1)的方法,所述路面整修机(1)具有用于接收摊铺物料的物料料斗(2)、用于压实摊铺物料的熨平板(3)、可驱动的后轮(10)和可驱动的前轮(1)。测量所述路面整修机(1)的述后轮(10)的旋转速度。此外,测量所述路面整修机(1)的行进速度。基于所述后轮(10)的所测得的旋转速度和所述路面整修机(1)的所测得的行进速度来计算路面整修机(1)的所述前轮(12)的目标驱动转矩。然后,所述前轮(12)的实际驱动转矩调节到所计算出的目标驱动转矩。本发明还涉及路面整修机(1)。

路面整修机和利用路面整修机铺设混合材料的方法.pdf
路面整修机(F),包括至少一个熨平板(2)、机器控制台(8)和通风系统(12),通风系统包括至少一个风扇(13),风扇(13)可根据需求通过机器控制台(8)独立于操作员被自动地且单独地开启或关闭。根据本发明,在铺设操作之前或铺设操作的过程中,确定通风系统(12)运行的限定需求,且在铺设操作过程中或为了进行铺设操作,在确定了限定需求后,通风系统(12)独立于操作员自动地操作,且可选地通风系统的功率受到控制。

具有用于摊铺熨平板电加热装置的功率调节器的路面整修机.pdf
路面整修机(1)包括牵引车辆(3)和在摊铺行进方向(F)上拖在牵引车辆(3)后面的用于压实摊铺物料的摊铺熨平板(9),所述牵引车辆(3)包括在摊铺行进方向(F)上在前部的用于接收摊铺物料的物料料斗(5)。在牵引车辆(3)上设置有用于提供电功率的发电机(G)。多个电加热装置(15)设置在摊铺熨平板(9)上用于电加热摊铺熨平板(9)。路面整修机(1)包括具有线路网络(25)的功率分配布置(23),所述功率分配布置(23)配置成向电加热装置(15)供应由发电机(G)提供的电功率。功率分配布置(23)包括设置在摊
路面整修机.pdf
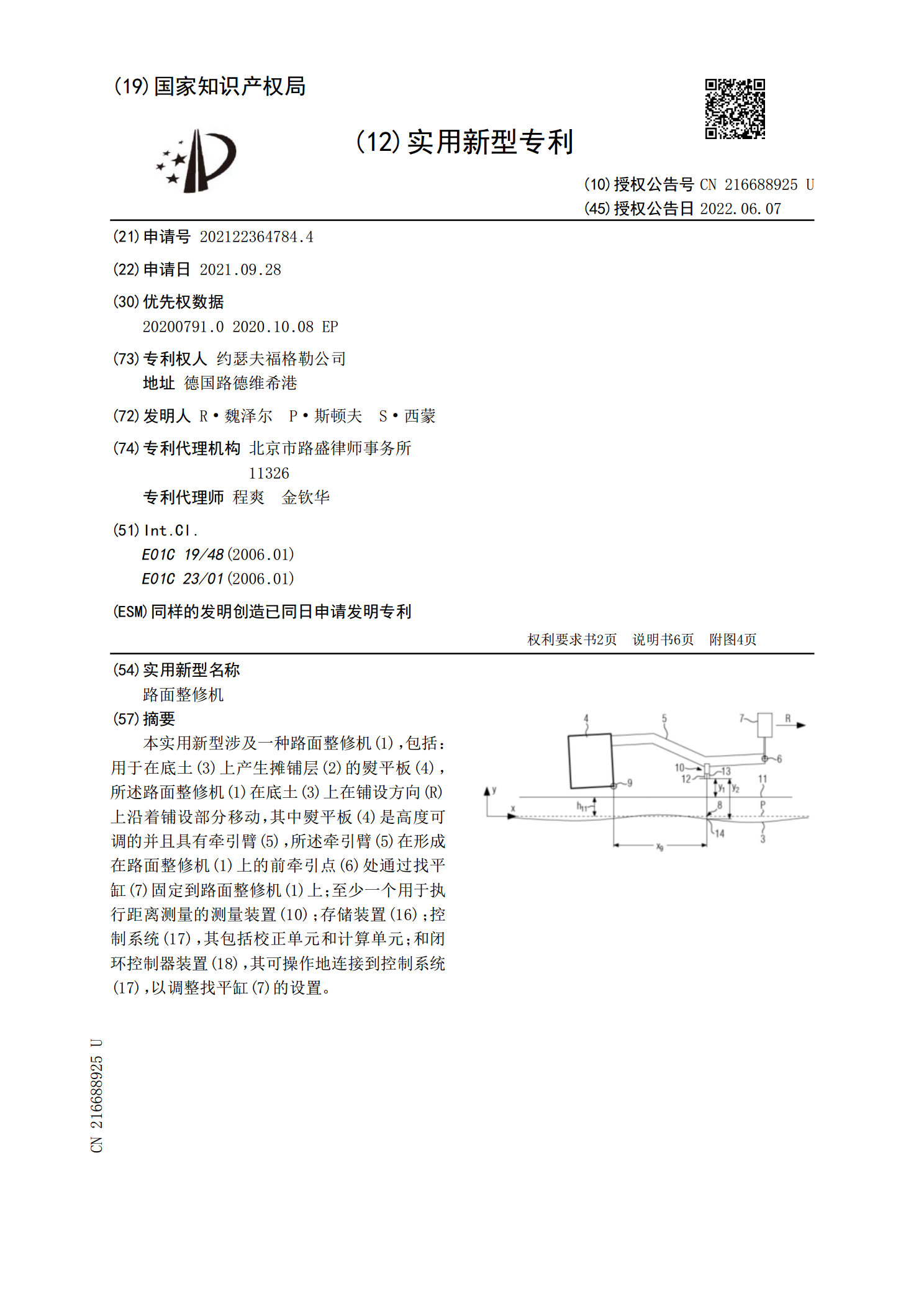
本实用新型涉及一种路面整修机(1),包括:用于在底土(3)上产生摊铺层(2)的熨平板(4),所述路面整修机(1)在底土(3)上在铺设方向(R)上沿着铺设部分移动,其中熨平板(4)是高度可调的并且具有牵引臂(5),所述牵引臂(5)在形成在路面整修机(1)上的前牵引点(6)处通过找平缸(7)固定到路面整修机(1)上;至少一个用于执行距离测量的测量装置(10);存储装置(16);控制系统(17),其包括校正单元和计算单元;和闭环控制器装置(18),其可操作地连接到控制系统(17),以调整找平缸(7)的设置。