
载波差分定位解算方法及其装置.pdf

努力****振宇


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

载波差分定位解算方法及其装置.pdf
本申请提供一种载波差分定位解算方法及其装置,包括:计算多个卫星的n个历元中的前后两个历元的伪距差值与多普勒参考值之间的差值结果,对前m个历元的差值结果进行归一化处理;对支持向量机的核函数的参数和模型参数进行训练得到预测模型;采用预测模型对后n‑m个历元的差值结果进行预测得到预测值,对预测值进行反归一化处理得到预测结果;获取同一历元中预测结果和差值结果正负符号一致的历元个数;当某卫星一致的历元个数大于或等于第一阈值时,对该卫星进行标记;获取未标记的卫星个数,当未标记的卫星个数大于或等于第二阈值时,采用未标记
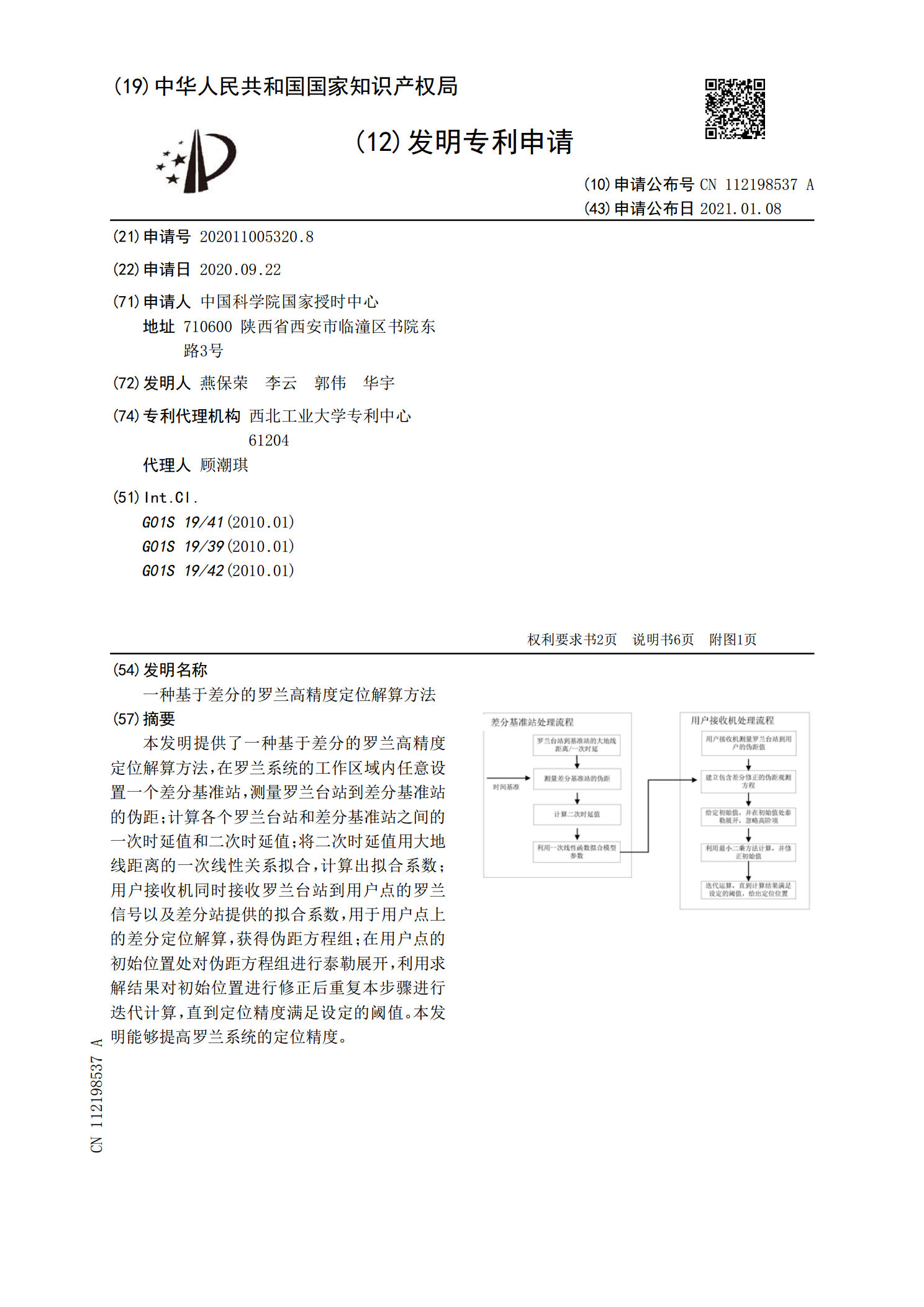
一种基于差分的罗兰高精度定位解算方法.pdf
本发明提供了一种基于差分的罗兰高精度定位解算方法,在罗兰系统的工作区域内任意设置一个差分基准站,测量罗兰台站到差分基准站的伪距;计算各个罗兰台站和差分基准站之间的一次时延值和二次时延值;将二次时延值用大地线距离的一次线性关系拟合,计算出拟合系数;用户接收机同时接收罗兰台站到用户点的罗兰信号以及差分站提供的拟合系数,用于用户点上的差分定位解算,获得伪距方程组;在用户点的初始位置处对伪距方程组进行泰勒展开,利用求解结果对初始位置进行修正后重复本步骤进行迭代计算,直到定位精度满足设定的阈值。本发明能够提高罗兰系

导航卫星定位解算方法及装置.pdf
本发明公开了一种导航卫星定位解算方法及装置,该方法包括:对对上、下边带导频路信号进行捕获,获取上、下边带的多普勒频移以及码相位值;根据上边带的多普勒频移以及码相位值,获取上边带信号电文数据;根据下边带的多普勒频移以及码相位值,获取下边带信号电文数据;基于上边带信号电文数据以及下边带信号电文数据,获取卫星导航定位结果;确定所述卫星导航定位结果中的异常数据;若存在所述异常数据,则确定应急解算策略;根据所述应急解算策略纠正解算结果。通过本发明提供的方法可以实现信号异常频繁情况下的ACE-BOC接收处理,利用AC

GPS载波相位模糊度的解算方法及其存在的问题.docx
GPS载波相位模糊度的解算方法及其存在的问题GPS载波相位模糊度解算方法及其存在的问题摘要:全球定位系统(GPS)是一种利用空间分布在地球表面的GPS卫星进行导航和定位的技术。其中,GPS载波相位观测数据承载着高精度定位所需的最为重要的信息。然而,由于环境干扰、信号传播延迟等因素,GPS载波相位观测数据往往存在着模糊度问题。本论文将针对GPS载波相位模糊度的解算方法及其存在的问题进行详细的探讨。一、GPS载波相位模糊度解算方法目前,常用的GPS载波相位模糊度解算方法主要包括静态解算和动态解算两种。静态解算

改进M估计的抗多个粗差定位解算方法.docx
改进M估计的抗多个粗差定位解算方法标题:基于改进M估计的抗多个粗差定位解算方法摘要:在定位领域,粗差(outliers)对于解算算法的精度和鲁棒性具有显著影响。为了提高定位算法的抗干扰能力,本论文提出了一种基于改进M估计的抗多个粗差定位解算方法。该方法通过引入加权因子,并结合RANSAC(RandomSampleConsensus)算法,并在其中应用了自适应权重评估和迭代停止准则等手段,以提高算法的定位精度和抗干扰能力。1.引言定位技术在诸多领域具有广泛的应用,如室内导航、智能交通以及无人机导航等。然而,