
微创手术机械臂套管.pdf

依波****bc


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

微创手术机械臂套管.pdf
本发明提供了一种微创手术机械臂套管,包括伸入套管,活动套管,内窥镜套管。其中伸入套管中开孔可供弹性轴传动和内窥镜数据传输;活动套管可固定微创手术操作臂,活动套管由反向双螺旋万向关节与伸入套管相连,使其能够转动,固定机构采用中间有螺纹孔的圆柱台,所述固定机构与关节单体相啮合,所述反向双螺旋万向关节通过线驱进行控制;内窥镜套管通过平行四边形支架结构控制内窥镜的移动,使其拥有更好的视野。本发明操作简单,设计新颖,体积小,质量轻,易于手术进行。

微创手术机械臂的可控刚度技术综述.docx
微创手术机械臂的可控刚度技术综述摘要:微创手术机械臂在辅助外科手术中发挥了重要的作用。可控刚度技术是微创手术机械臂的一个关键技术,可以提高手术机械臂对组织的操纵能力和灵活性。本文综述了可控刚度技术在微创手术机械臂中的应用,包括可控刚度的概念、分类、实现方法和优点。同时,对可控刚度技术的发展趋势进行了展望。关键词:微创手术机械臂;可控刚度技术;组织操纵能力;灵活性1.引言随着微创手术的快速发展,微创手术机械臂成为了辅助外科手术中的重要工具。在微创手术中,手术机械臂需要对组织进行精确的操纵和操作。然而,传统的
一种神经外科微创手术机械臂.pdf
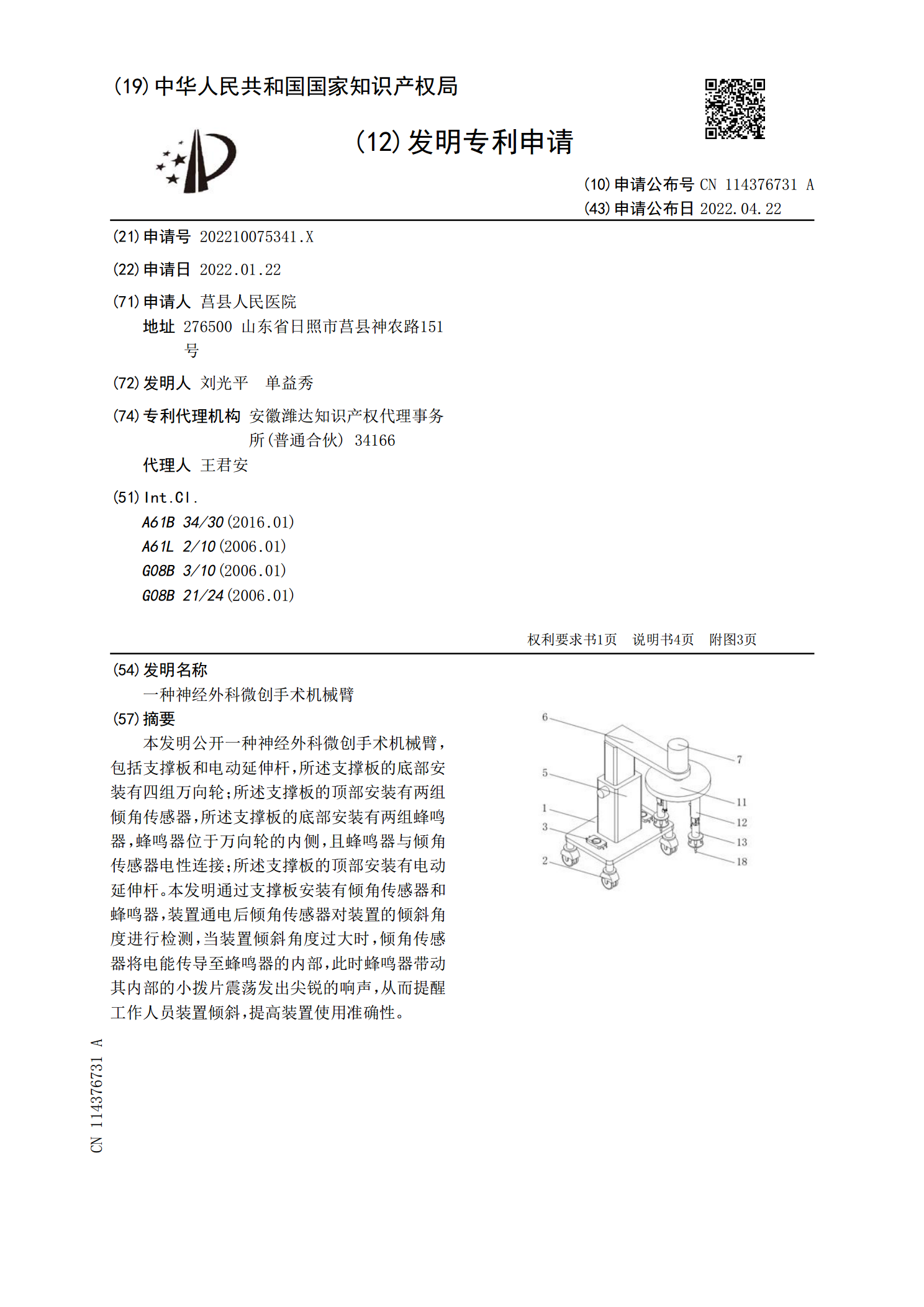
本发明公开一种神经外科微创手术机械臂,包括支撑板和电动延伸杆,所述支撑板的底部安装有四组万向轮;所述支撑板的顶部安装有两组倾角传感器,所述支撑板的底部安装有两组蜂鸣器,蜂鸣器位于万向轮的内侧,且蜂鸣器与倾角传感器电性连接;所述支撑板的顶部安装有电动延伸杆。本发明通过支撑板安装有倾角传感器和蜂鸣器,装置通电后倾角传感器对装置的倾斜角度进行检测,当装置倾斜角度过大时,倾角传感器将电能传导至蜂鸣器的内部,此时蜂鸣器带动其内部的小拨片震荡发出尖锐的响声,从而提醒工作人员装置倾斜,提高装置使用准确性。

微创手术机器人机械臂结构设计与工作空间分析.docx
微创手术机器人机械臂结构设计与工作空间分析微创手术机器人机械臂结构设计与工作空间分析摘要:微创手术机器人是近年来发展迅速的新兴领域,为了提高手术的准确性和可操作性,机械臂结构的设计和工作空间的分析非常关键。本文以微创手术机器人的机械臂结构设计和工作空间分析为研究对象,介绍了机器人的基本构架、关节结构与驱动方式,并针对工作空间进行了分析和优化。研究结果表明,通过合理设计机械臂的结构和优化工作空间,可以提高机器人的操作能力和手术效果。关键词:微创手术机器人,机械臂,结构设计,工作空间,分析,优化1.引言随着微

一种用于单孔腹腔镜环境下的微创手术机械臂.pdf
本发明涉及一种用于单孔腹腔镜环境下的微创手术机械臂。包括操作单元和传动单元;传动单元与操作单元通过用于控制操作单元活动的传动丝线组连接;传动丝线组包括钳夹关节传动丝线、上臂传动丝线、下臂传动丝线、中空传动丝线;操作单元包括钳夹机构与中空关节;钳夹机构与中空关节通过两个设置在传动单元空心圆柱体顶端的半圆啮合齿轮连接;钳夹机构包括由下至上依次连接的下臂摆动关节、上臂摆动关节及钳夹关节;钳夹关节包括左钳夹与右钳夹;所述左钳夹与右钳夹均由钳夹与钳夹柄组成。本发明提供了一种结构简单,体积小,重量轻,造价低的微创手术