
一种用于钢构件焊接用自动翻转机.pdf

阳炎****找我


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于钢构件焊接用自动翻转机.pdf
本发明公开了一种用于钢构件焊接用自动翻转机,包括翻转机壳和调整移动导轨,所述翻转机壳上端开设有左臂开口和右臂开口,所述左臂开口内设置有翻转左臂,所述右臂开口内设置有翻转右臂,所述翻转左臂和翻转右臂上均安装有相互叠合的翻转齿盘,两个翻转齿盘通过转轴转动安装在翻转机壳内壁上,所述翻转左臂上的翻转齿盘与翻转机壳内的左齿条啮合连接,所述左齿条与左驱动电机输出轴连接,所述翻转右臂上的翻转齿盘与翻转机壳内的右齿条啮合连接,所述右齿条与右驱动电机输出轴连接,所述翻转机壳侧壁上设置有分别与左驱动电机、右驱动电机连接的控制
一种用于钢构件翻身的翻转机.pdf
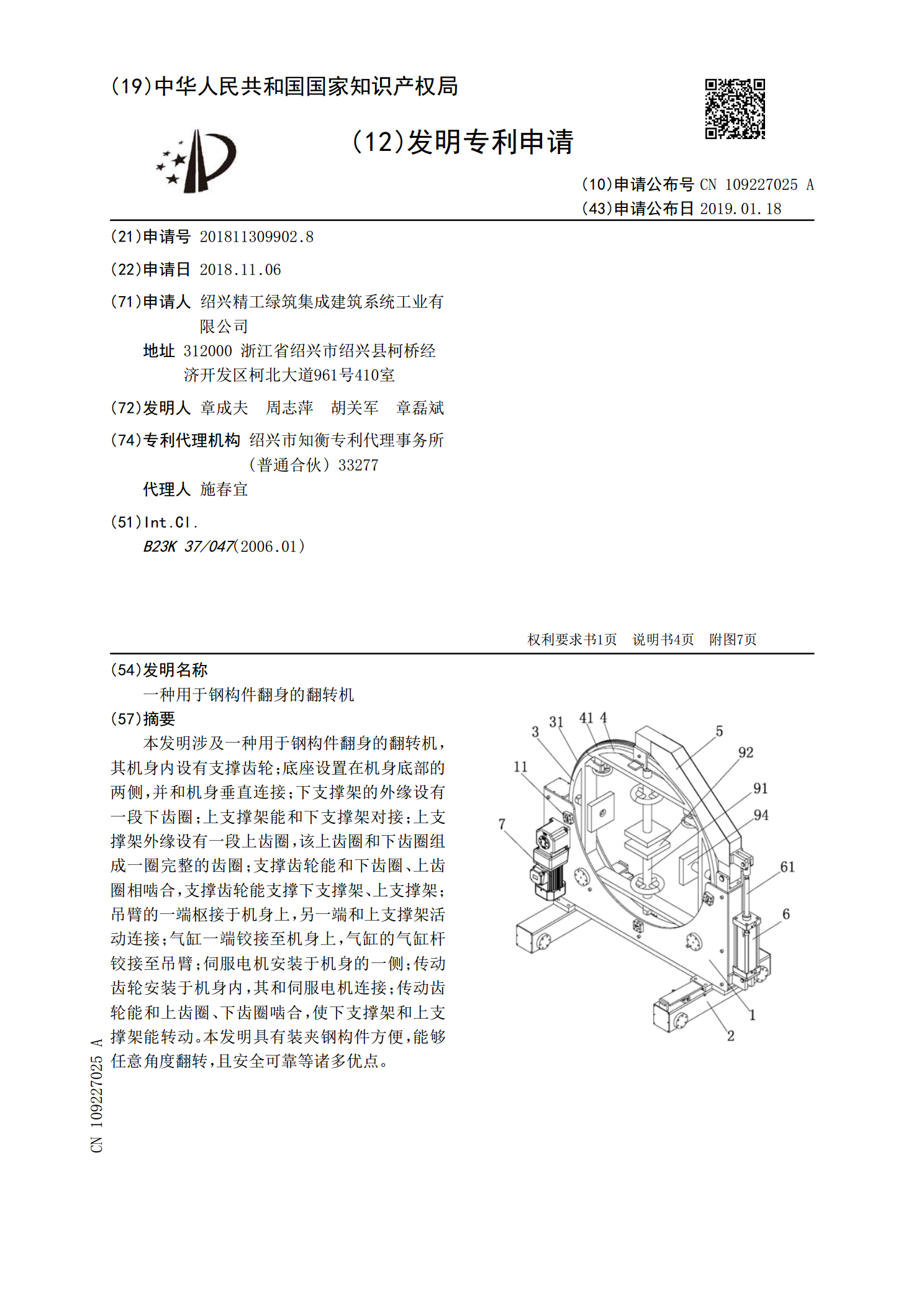
本发明涉及一种用于钢构件翻身的翻转机,其机身内设有支撑齿轮;底座设置在机身底部的两侧,并和机身垂直连接;下支撑架的外缘设有一段下齿圈;上支撑架能和下支撑架对接;上支撑架外缘设有一段上齿圈,该上齿圈和下齿圈组成一圈完整的齿圈;支撑齿轮能和下齿圈、上齿圈相啮合,支撑齿轮能支撑下支撑架、上支撑架;吊臂的一端枢接于机身上,另一端和上支撑架活动连接;气缸一端铰接至机身上,气缸的气缸杆铰接至吊臂;伺服电机安装于机身的一侧;传动齿轮安装于机身内,其和伺服电机连接;传动齿轮能和上齿圈、下齿圈啮合,使下支撑架和上支撑架能转
一种用于钢构架焊接的翻转机.pdf
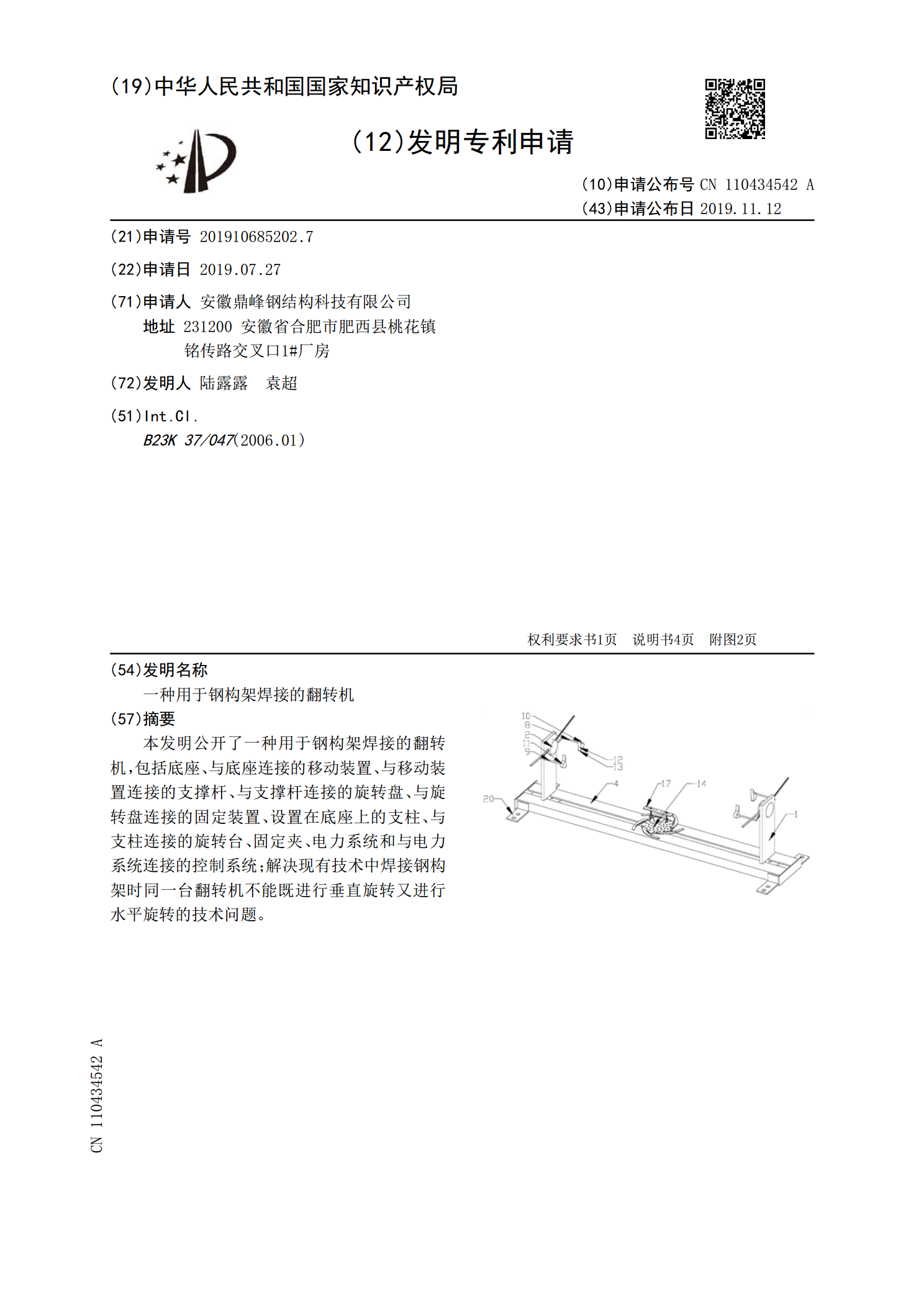
本发明公开了一种用于钢构架焊接的翻转机,包括底座、与底座连接的移动装置、与移动装置连接的支撑杆、与支撑杆连接的旋转盘、与旋转盘连接的固定装置、设置在底座上的支柱、与支柱连接的旋转台、固定夹、电力系统和与电力系统连接的控制系统;解决现有技术中焊接钢构架时同一台翻转机不能既进行垂直旋转又进行水平旋转的技术问题。

一种箱式钢构件的自动焊接装置.pdf
本发明公开了一种箱式钢构件的自动焊接装置,它是支架的上端可转动地与悬臂座的下端相连;在支架的中部设有的移动座上纵向连有焊枪;在焊枪的外侧支架上横向连有行走轮;在焊枪的内侧支架上横向连有挡焊剂板;在挡焊剂板的下方支架上纵向连有导向轮;行走轮的转动中心与焊枪的中心垂直;导向轮的转动中心与焊枪的中心平行。通过控制焊接设备带动支架上的行走轮、导向轮,对应地在箱式钢构件的顶面、侧面上行走移动,同时带动焊枪中孔内的焊条沿箱式钢构件长度方向的焊缝自动进行均匀密实地焊接。焊接产生的焊剂液,通过挡焊剂板进行阻挡防止外流。明
一种自动焊接反转机.pdf
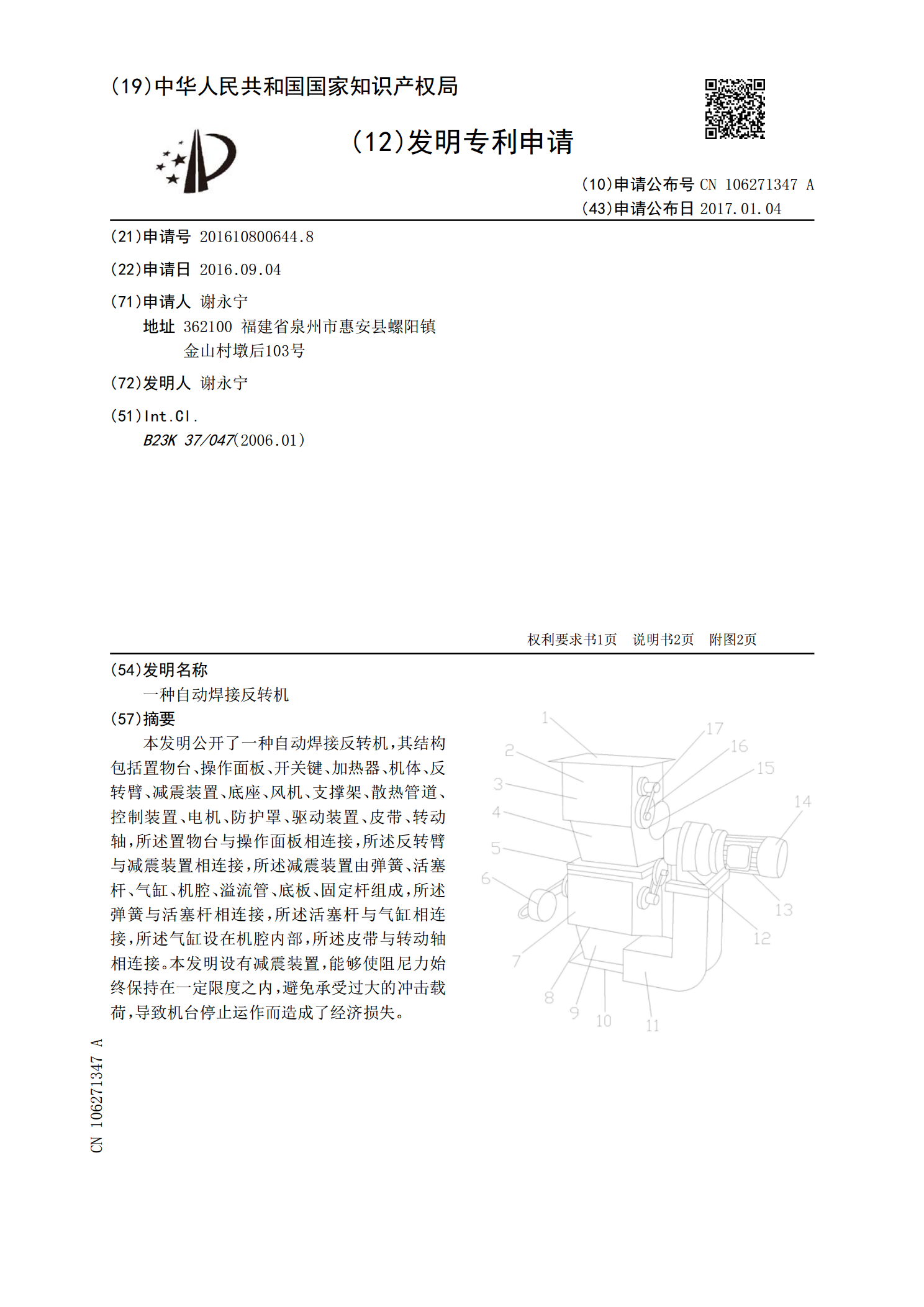
本发明公开了一种自动焊接反转机,其结构包括置物台、操作面板、开关键、加热器、机体、反转臂、减震装置、底座、风机、支撑架、散热管道、控制装置、电机、防护罩、驱动装置、皮带、转动轴,所述置物台与操作面板相连接,所述反转臂与减震装置相连接,所述减震装置由弹簧、活塞杆、气缸、机腔、溢流管、底板、固定杆组成,所述弹簧与活塞杆相连接,所述活塞杆与气缸相连接,所述气缸设在机腔内部,所述皮带与转动轴相连接。本发明设有减震装置,能够使阻尼力始终保持在一定限度之内,避免承受过大的冲击载荷,导致机台停止运作而造成了经济损失。