
一种多档位置调节机构.pdf

爱欢****23


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多档位置调节机构.pdf
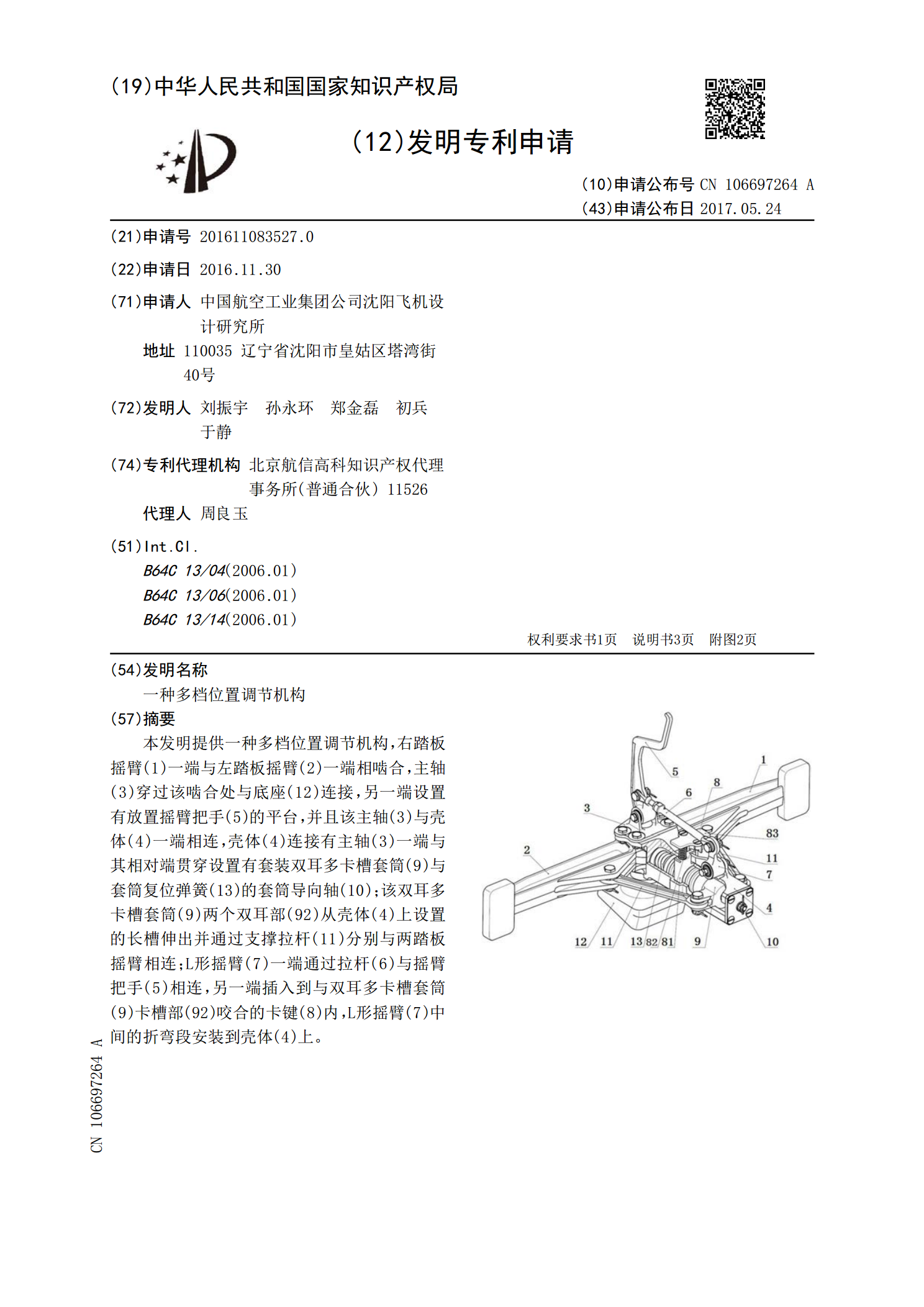
本发明提供一种多档位置调节机构,右踏板摇臂(1)一端与左踏板摇臂(2)一端相啮合,主轴(3)穿过该啮合处与底座(12)连接,另一端设置有放置摇臂把手(5)的平台,并且该主轴(3)与壳体(4)一端相连,壳体(4)连接有主轴(3)一端与其相对端贯穿设置有套装双耳多卡槽套筒(9)与套筒复位弹簧(13)的套筒导向轴(10);该双耳多卡槽套筒(9)两个双耳部(92)从壳体(4)上设置的长槽伸出并通过支撑拉杆(11)分别与两踏板摇臂相连;L形摇臂(7)一端通过拉杆(6)与摇臂把手(5)相连,另一端插入到与双耳多卡槽套

一种车把位置调节机构.pdf
本发明公开了一种用于调节两轮或三轮车车把位置调节机构,包括含有被夹持的大致水平且截面大致圆形或多边形的车把部位、夹持车把的上盖、下盖和顶部有台阶的车把立管,夹持车把的上盖和下盖一侧相连接,另一侧通过单独的锁紧机构可以相互锁紧。由于下盖套于车把立管外并且在车把立管顶端台阶之下,因此车把立管可通过锁紧机构紧固于前叉之上,并且可反复调节车把位置也不会影响前叉与车把间的刚性,使车子的舒适度和安全性能更好。同时,通过松开锁紧机构即可使整个车把系统相对竖管旋转。不使用时,车把可转并放下至与车身平行的方向,以

一种窜墨位置调节机构.pdf
本发明涉及印刷行业胶印机上的一种窜墨位置调节机构,由主驱动机构、变速机构、窜动机构、链带Ⅰ、链带Ⅱ、窜墨辊、机架墙板组成,在机架墙板上设有主驱动机构,在机架墙板上设有窜墨辊,在机架墙板上设有变速机构;链带Ⅰ分别与主驱动机构中的动力链轮、变速机构中的链轮Ⅰ相啮合链接;窜动机构设置在机架墙板上,并分别与各窜墨辊相连;链带Ⅱ分别与变速机构中的链轮Ⅱ、窜动机构中的链轮相啮合链接;由于采用电机进行调节,并通过变速机构将位置调整的动力传递给窜动机构,从而使着墨位置进行了调整;由于设有位置传感器,从而能及时地将位置调节
一种多档变速机构.pdf
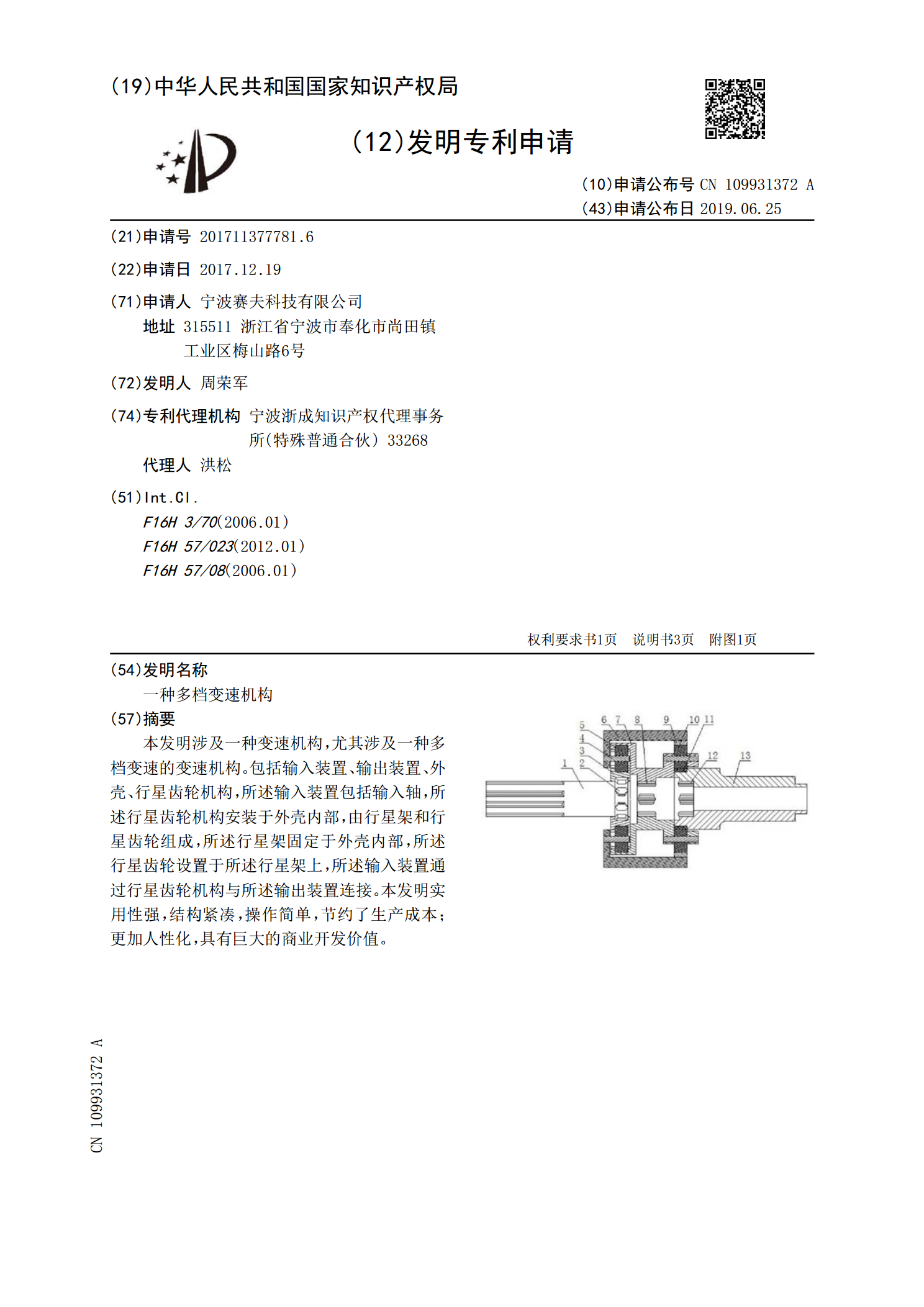
本发明涉及一种变速机构,尤其涉及一种多档变速的变速机构。包括输入装置、输出装置、外壳、行星齿轮机构,所述输入装置包括输入轴,所述行星齿轮机构安装于外壳内部,由行星架和行星齿轮组成,所述行星架固定于外壳内部,所述行星齿轮设置于所述行星架上,所述输入装置通过行星齿轮机构与所述输出装置连接。本发明实用性强,结构紧凑,操作简单,节约了生产成本;更加人性化,具有巨大的商业开发价值。

一种传感器位置调节机构.pdf
本申请公开了一种传感器位置调节机构,其包括固定块,该固定块用于固定传感器;连接部件,该连接部件用于将传感器固定至固定块上;纵向移动部,固定块通过围绕纵向移动部旋转的方式,实现固定块在纵向移动部上下方向移动,以实现固定块在纵向的位置调整;导向件,固定块通过纵向移动部连接至导向件上,该位置调节机构还包括布线板,布线板上具有水平长孔,通过螺丝将导向件连接至水平长孔的不同位置,实现导向件在布线板上的水平位置进行调整。本申请能实现传感器在两个自由度上实现调节,且拆卸方便。