
轴传变桨距四旋翼飞行器的驱动机构和方法.pdf

小沛****文章


1/7

2/7

3/7

4/7
5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轴传变桨距四旋翼飞行器的驱动机构和方法.pdf
本发明公开了一种轴传变桨距四旋翼飞行器的驱动机构和方法,该机构包括:四个伞齿,所述四个伞齿两两相对设置且所述四个伞齿相互啮合;驱动装置,用于为所述四个伞齿中的一个或多个伞齿提供驱动力;支撑结构,用于为所述四个伞齿和所述驱动装置提供支撑。本发明具有如下优点:结构简单可靠、动力输出同步、在保证旋翼面积即旋翼效率的情况下,进一步降低整机体积及重量。

变桨距四旋翼飞行器的研究.docx
变桨距四旋翼飞行器的研究随着科技的不断进步,四旋翼飞行器逐渐走进人们的视野。作为一种高效、灵活的空中平台,四旋翼飞行器被广泛运用于航拍、应急救援、科学探测等领域。然而,在飞行器的设计和制造中,变桨距技术是至关重要的一环,对于四旋翼飞行器的飞行稳定性和效率具有重要影响。本文将从变桨距技术的原理、方法及应用等方面进行探讨,旨在为相关领域的研究提供参考。一、变桨距的原理变桨距是指在飞行过程中,四旋翼飞行器的桨叶可根据需要自动或手动调整桨距。桨距是指桨面与前进方向夹角的余弦值,也就是桨叶旋转的角度大小。通过调整桨
一种变桨距四旋翼飞行器.pdf
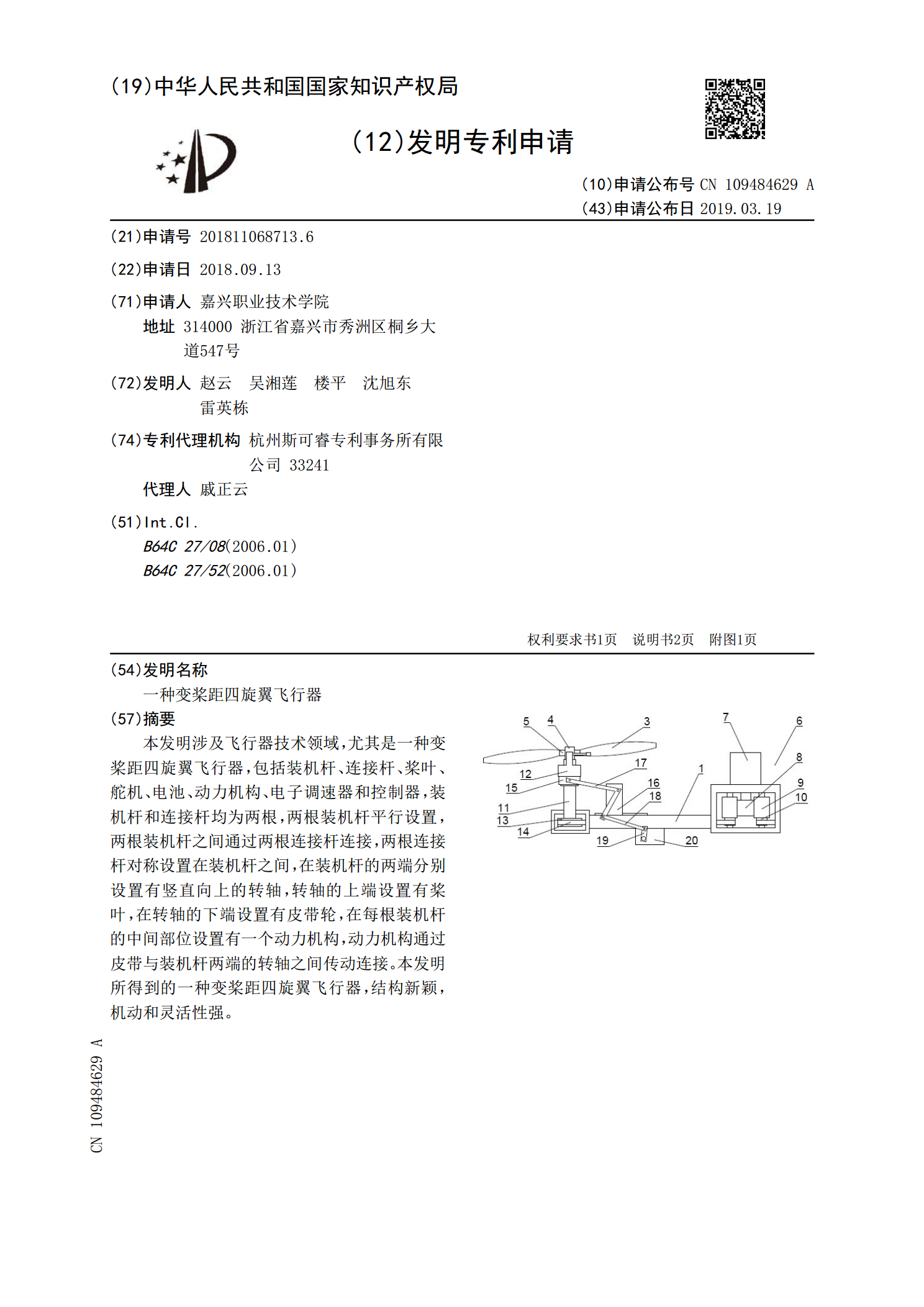
本发明涉及飞行器技术领域,尤其是一种变桨距四旋翼飞行器,包括装机杆、连接杆、桨叶、舵机、电池、动力机构、电子调速器和控制器,装机杆和连接杆均为两根,两根装机杆平行设置,两根装机杆之间通过两根连接杆连接,两根连接杆对称设置在装机杆之间,在装机杆的两端分别设置有竖直向上的转轴,转轴的上端设置有桨叶,在转轴的下端设置有皮带轮,在每根装机杆的中间部位设置有一个动力机构,动力机构通过皮带与装机杆两端的转轴之间传动连接。本发明所得到的一种变桨距四旋翼飞行器,结构新颖,机动和灵活性强。

变距旋翼及包括该变距旋翼的多旋翼飞行器及其飞行方法.pdf
本发明提供了一种变距旋翼,其包括:转动轴、轮毂和安装于所述轮毂上的多片桨叶;第一驱动机构,其用于提供使桨叶变距的驱动力;第一传动机构,其与所述第一驱动机构连接,以及通过一连接器与所述多片桨叶分别转动连接,并通过带动所述连接器往复滑动而带动所述多片桨叶变距。本发明还提供了包括前述变距旋翼的多旋翼飞行器及其飞行方法,其多个旋翼的转速相同,通过改变旋翼的桨叶桨距角来改变飞行时的气动力。通过本发明能够快速改变桨叶桨距角,而且能够高效快速地改变飞行时的气动力,从而快速调整飞行姿态。

一种无人机旋翼变桨距机构.pdf
本申请提供了一种无人机旋翼变桨距机构,其具有一个空心主轴,无人机的旋翼固定安装在所述空心主轴的上端并由所述空心主轴带动所述旋翼转动以产生升力;所述空心主轴内部设置有一个变距操纵杆,变距操纵杆的上端可相对其转动地连接有一个可随所述变距操纵杆上下运动的传力臂支座,所述传力臂支座通过传力臂驱动所述旋翼的偏心臂带动所述旋翼绕其安装轴线转动以改变所述旋翼的迎角。本申请通过将变距操纵杆设置在空心主轴内部,使得旋翼和悬臂之间不需要留出安装变距机构的空间,主轴从悬臂向上伸出的高度可以尽可能变小,大大减轻了结构重量,提高了