
一种可折叠电动锁紧装置.pdf

小长****6淑


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种可折叠电动锁紧装置.pdf
本发明公开了一种可折叠电动锁紧装置。该可折叠电动锁紧装置包括随转端齿盘、锁止端齿盘、定位滑轨及驱动组件,随转端齿盘用于设置在转位机构的旋转框上;定位滑轨用于设置在转位机构的固定外框上;锁止端齿盘滑动设置在定位滑轨上,锁止端齿盘能够在定位滑轨上移动并与随转端齿盘啮合以锁定旋转框;驱动组件用于设置在转位机构的固定外框上,驱动组件用于驱动锁止端齿盘在定位滑轨上移动并锁定锁止端齿盘在定位滑轨上的位置。本发明的可折叠电动锁紧装置,整个锁紧装置设置在转位机构的固定外框与旋转包络圆之间的空隙,空间占用小,旋转惯量小,且

一种快速电动锁紧装置.pdf
本发明涉及一种快速电动锁紧装置,包括电机、减速机、丝杆支座、丝杆轴、滑动轴、固定锁紧支座、传动锁紧支座、摆杆、连接轴、滑栓和锁紧轴。减速机与电机上下连接,减速机置于上方。丝杆轴的传动轴键连接着齿轮,且通过轴承设置在减速机的输出端。电机与减速机通过轴之间的齿轮啮合传递着扭矩。电机经减速机带动丝杆轴移动滑动轴,通过摆杆的作用使固定锁紧支座相对传动锁紧支座形成锁紧和解锁两种状态。本发明可使锁紧与解锁具有可控性,具有更好的防锁死性能,可以通过锁紧轴螺母进行手工解锁。本发明性能稳定可靠,使用寿命长。
电动柔性锁紧装置.pdf
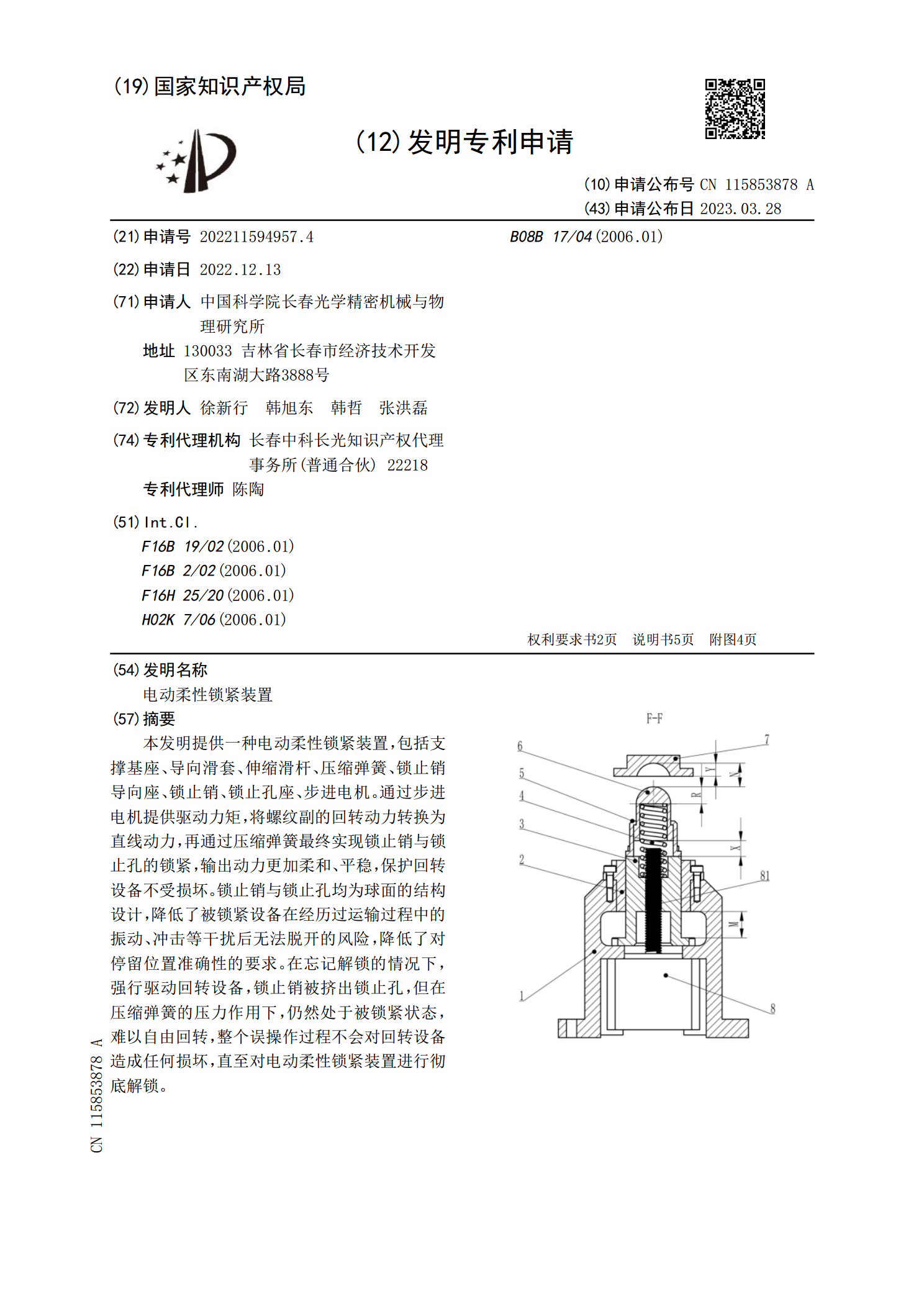
本发明提供一种电动柔性锁紧装置,包括支撑基座、导向滑套、伸缩滑杆、压缩弹簧、锁止销导向座、锁止销、锁止孔座、步进电机。通过步进电机提供驱动力矩,将螺纹副的回转动力转换为直线动力,再通过压缩弹簧最终实现锁止销与锁止孔的锁紧,输出动力更加柔和、平稳,保护回转设备不受损坏。锁止销与锁止孔均为球面的结构设计,降低了被锁紧设备在经历过运输过程中的振动、冲击等干扰后无法脱开的风险,降低了对停留位置准确性的要求。在忘记解锁的情况下,强行驱动回转设备,锁止销被挤出锁止孔,但在压缩弹簧的压力作用下,仍然处于被锁紧状态,难以

一种电动客车电池箱锁紧与解锁装置.pdf
一种电动客车电池箱锁紧与解锁装置,包括蜗轮蜗杆电机(1)、与蜗轮蜗杆电机(1)的输出轴连接并置于蜗轮蜗杆电机底部的转盘(2)、通过销轴(7)对称连接于转盘两边的两根连杆(3)、分别通过转动销(8)对称连接于两根连杆(3)另一端的两根摇杆(6)、对称固定连接于摇杆外端头的两个L型弯板(5)、对称连接于L型弯板另一端的两个楔形压块构件(4)。本发明可以自动对电池箱体施加锁紧力、使电池箱体与车体紧密结合,有效防止运行颠簸中的电池箱跳动和冲击,确保车辆运行安全,同时又便于解锁打开实现电池箱快换。

一种汽车电动尾门锁紧装置的支持组件.pdf
本发明涉及一种汽车尾门锁紧装置的支持组件,包括有拉线和外壳,其特征在于:所述支持组件包括有与拉线连接的齿条部以及连接于齿条部的齿轮部,所述齿轮部上设有连杆,本发明的有益效果为:支持组件结构简单且使用稳定,可推广使用。