
二平面机构结构分析.pptx

脚滑****狐狸

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共53页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
二平面机构结构分析.pptx
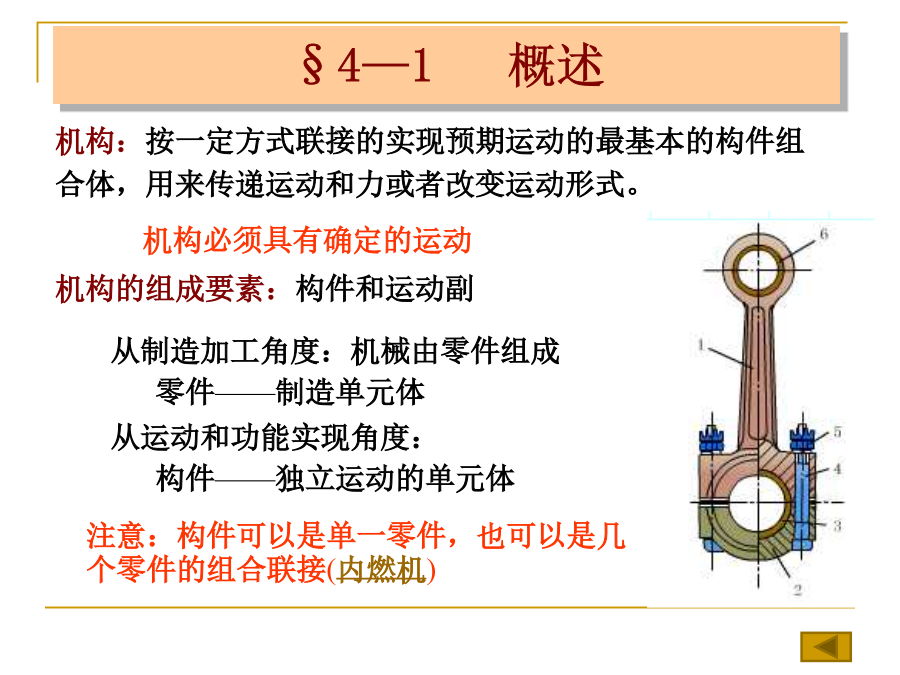
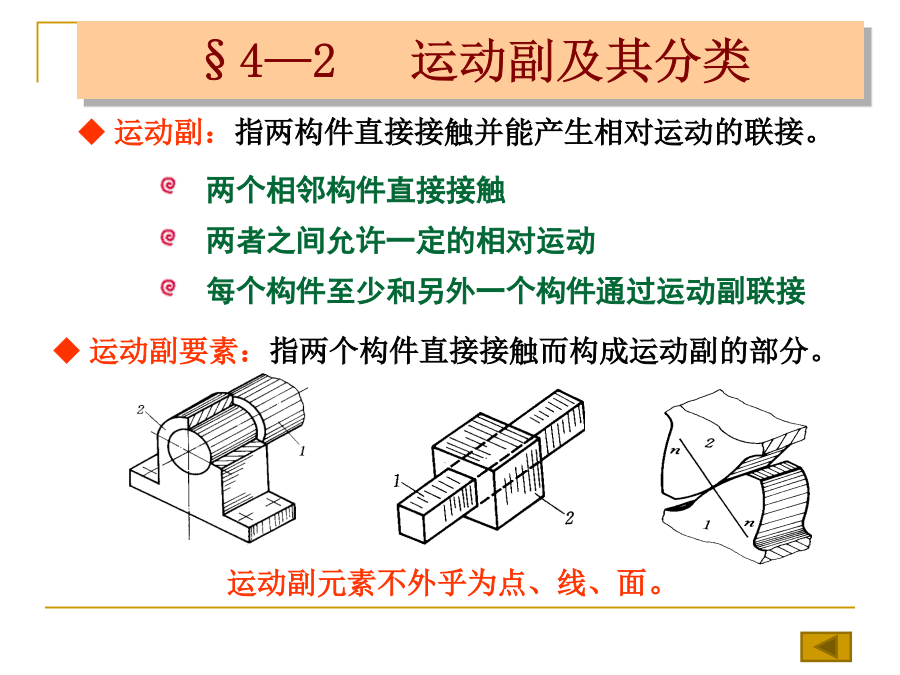
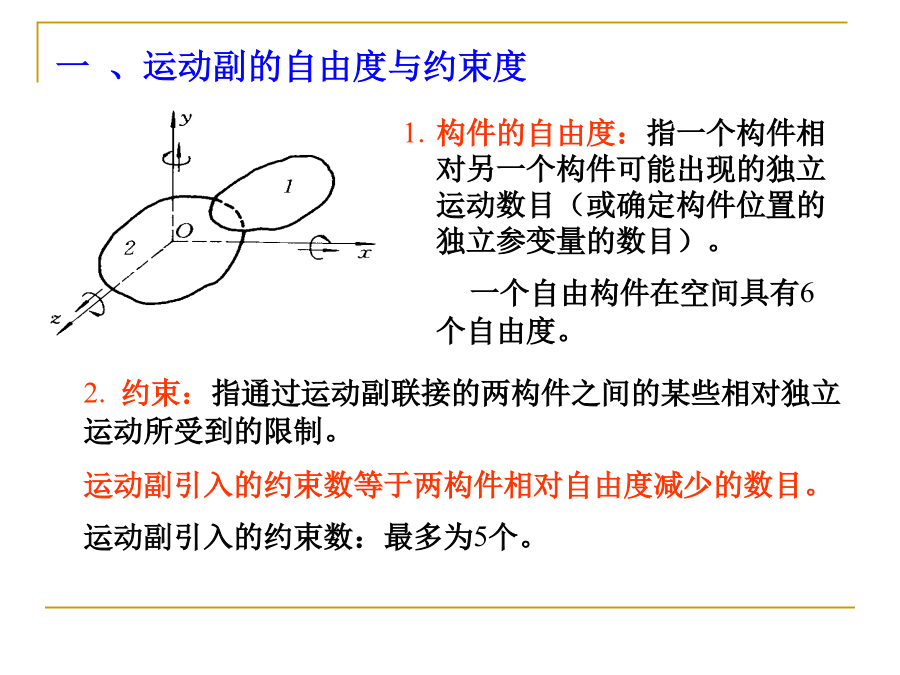
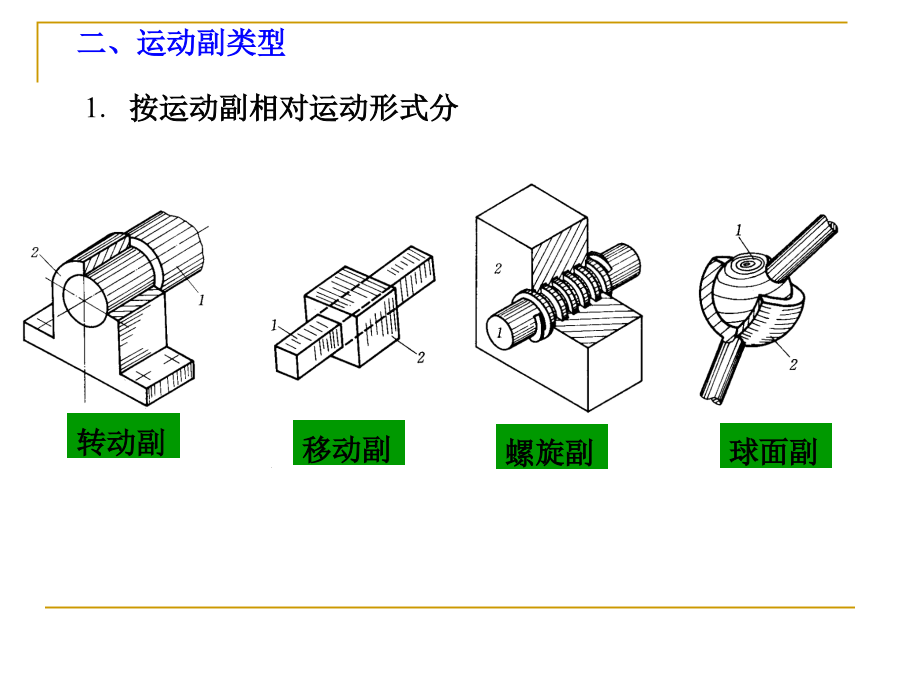
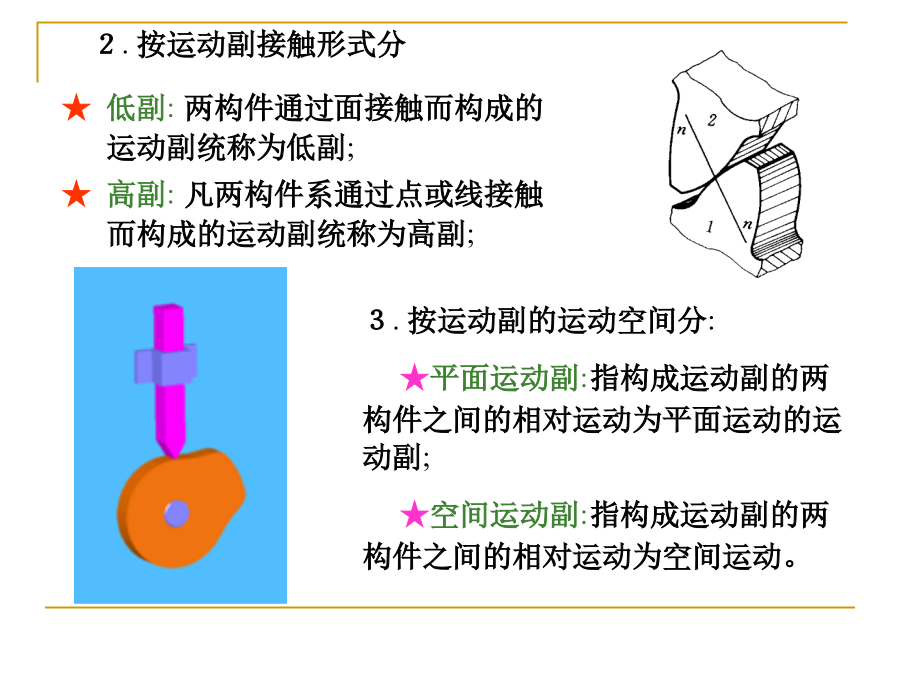
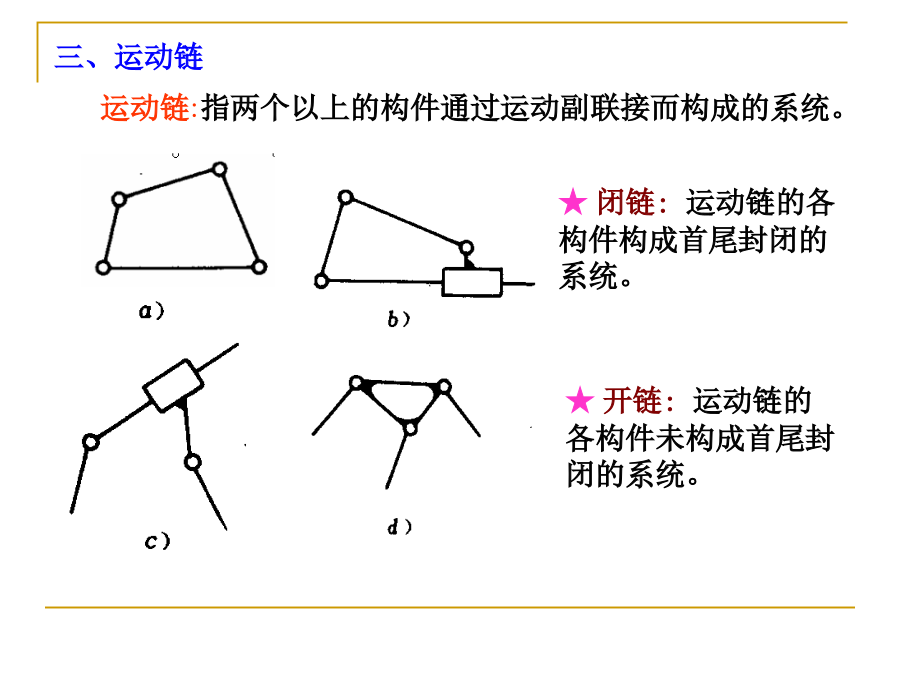
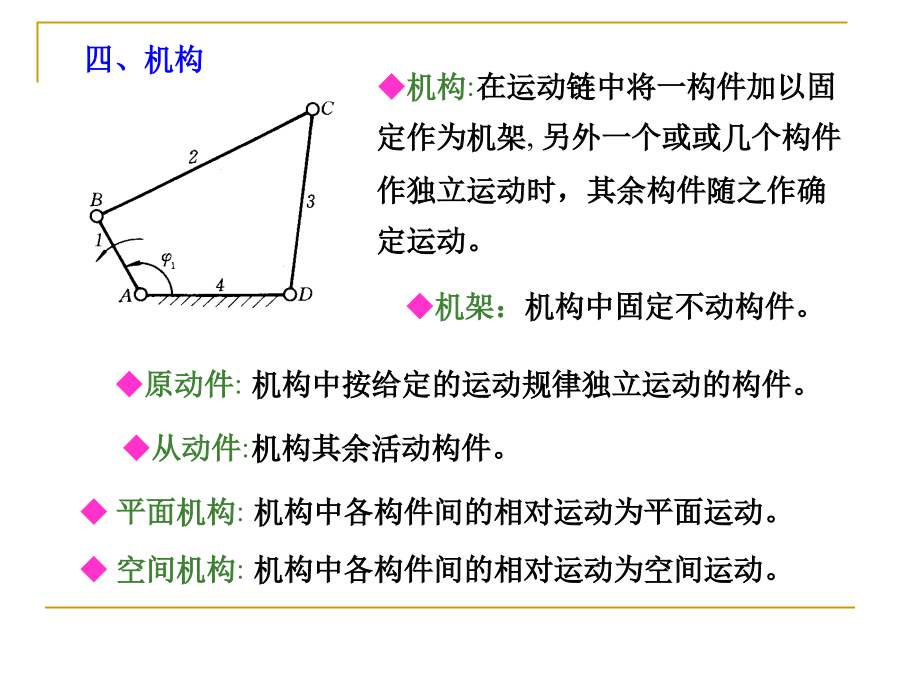
参考书目目录机构:按一定方式联接的实现预期运动的最基本的构件组合体,用来传递运动和力或者改变运动形式。机构的组成要素:构件和运动副◆运动副:指两构件直接接触并能产生相对运动的联接。◆运动副要素:指两个构件直接接触而构成运动副的部分。一、运动副的自由度与约束度1.按运动副相对运动形式分2.按运动副接触形式分三、运动链四、机构机构的示意图:指为了表明机构结构状况,不要求严格地按比例而绘制的简图。实际绘制的运动简图会因为运动副绘制或表达方式的不同而会使同一机构所绘制的机构运动简图不同;或不同机构的运动简图相同。
平面机构结构分析.ppt
第二章平面机构的结构分析§2-1机构结构分析的内容及目的§2-2机构的组成2.运动副(Kinematicpair)2)按相对运动范围分有:平面运动副-平面运动(Plannarkinematicpair)3)按运动副元素分有:①高副-点、线接触,应力高(highpair)常见运动副符号的表示:国标GB4460-84常用运动副的符号平面高副构件的表示方法:一般构件的表示方法注意事项:常用机构运动简图符号机构运动简图应满足的条件:1.构件数目与实际相同第二十二页,编辑于星期日:十二点九分。颚式破碎机§2-4机构
平面机构结构分析.pptx
湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机电院马克新湖南科大机

平面机构结构分析.ppt
章平面机构的结构分析§2-1机构结构分析的内容及目的§2-2机构的组成2)按相对运动范围分有:平面运动副-平面运动(Plannarkinematicpair)3)按运动副元素分有:①高副-点、线接触,应力高(highpair)常见运动副符号的表示:国标GB4460-84常用运动副的符号平面高副构件的表示方法:一般构件的表示方法注意事项:常用机构运动简图符号机构运动简图应满足的条件:1.构件数目与实际相同§2-3平面机构自由度的计算及机构运动确定的条件运动副自由度数约束数回转副1(θ)+2(x,y)=3活动
平面机构结构分析.ppt
第二章平面机构的结构分析§2-1机构结构分析的内容及目的§2-2机构的组成2)按相对运动范围分有:平面运动副-平面运动(Plannarkinematicpair)3)按运动副元素分有:①高副-点、线接触,应力高(highpair)常见运动副符号的表示:国标GB4460-84常用运动副的符号平面高副构件的表示方法:一般构件的表示方法三副构件注意事项:若干常用机构运动简图符号链传动机构运动简图应满足的条件:1.构件数目与实际相同甘肃工业大学专用1§2-3平面机构自由度的计算及机构运动确定的条件运动副自由度数约