
一种分拣水果包装智能机器人及其分拣包装方法.pdf

星菱****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种分拣水果包装智能机器人及其分拣包装方法.pdf
本发明公开了一种分拣水果包装智能机器人及其分拣包装方法,该分拣水果包装智能机器人,包括:基础框架、分拣机构和打包机构,其中基础框架包括传送架,以及与所述传送架固定连接的盒盖架;分拣机构包括设置在所述传送架上方的升降入料仓,以及与所述升降入料仓连通的分拣组件;打包机构包括两组中心对称设置的一类包装组件和二类包装组件,每组包装组件包括设置在所述传送架上方的盒体传送组件,设置在所述盒体传送组件上方的盒盖移动组件,与所述盒盖移动组件啮合的盒盖吸附组件。本发明在升降入料仓的下方设计了分拣组件,对需要包装的水果进行分
一种包装瓶分拣装置及其分拣方法.pdf
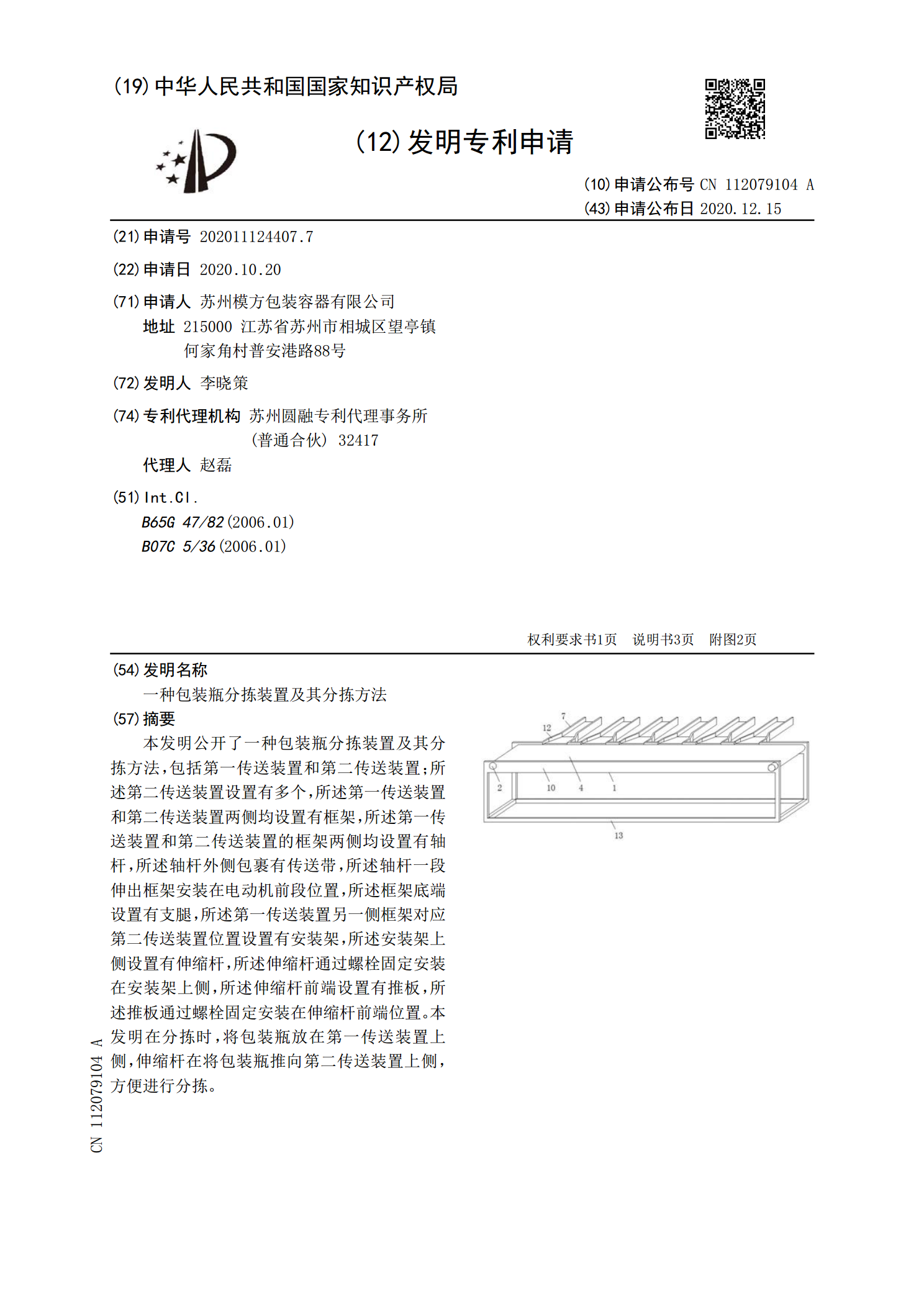
本发明公开了一种包装瓶分拣装置及其分拣方法,包括第一传送装置和第二传送装置;所述第二传送装置设置有多个,所述第一传送装置和第二传送装置两侧均设置有框架,所述第一传送装置和第二传送装置的框架两侧均设置有轴杆,所述轴杆外侧包裹有传送带,所述轴杆一段伸出框架安装在电动机前段位置,所述框架底端设置有支腿,所述第一传送装置另一侧框架对应第二传送装置位置设置有安装架,所述安装架上侧设置有伸缩杆,所述伸缩杆通过螺栓固定安装在安装架上侧,所述伸缩杆前端设置有推板,所述推板通过螺栓固定安装在伸缩杆前端位置。本发明在分拣时,

蛋分拣与包装方法及组件.pdf
一种蛋分拣与包装方法及组件,其中蛋通过蛋供应装置(3)放置在环形的蛋输送机(2)上。蛋从环形的蛋输送机选择性地移动到包装线(6a‑6c)中,在包装线中蛋被包装到蛋包装物品中。未释放到包装线中的一者中的蛋保留在环形的蛋输送机上并且被再循环以再次通过包装线以便被释放到包装线中的一者中。

一种高效率的智能分拣包装系统.pdf
本发明公开了一种高效率的智能分拣包装系统,包括:传送机构、检测机构、分拣机构和存储机构;所述传送机构上安装有检测机构,所述传送机构上安装有分拣机构,所述传送机构侧端安装有存储机构。该高效率的智能分拣包装系统,通过检测机构的物品被检测机构进行检测,方便后期进行分检,检测器方便进行更换,使得装置便于适用更多的使用环境,使得装置实用性大大提高,检测头使得装置分拣范围扩大,智能化程度提升,方便将信息录入并分析,方便后期进行分拣操作,整体操作自动化程度高,工作效率大大提高,省时省力,通过存储机构将分拣后的物品进行存
一种物流包裹智能分拣系统及其分拣方法.pdf
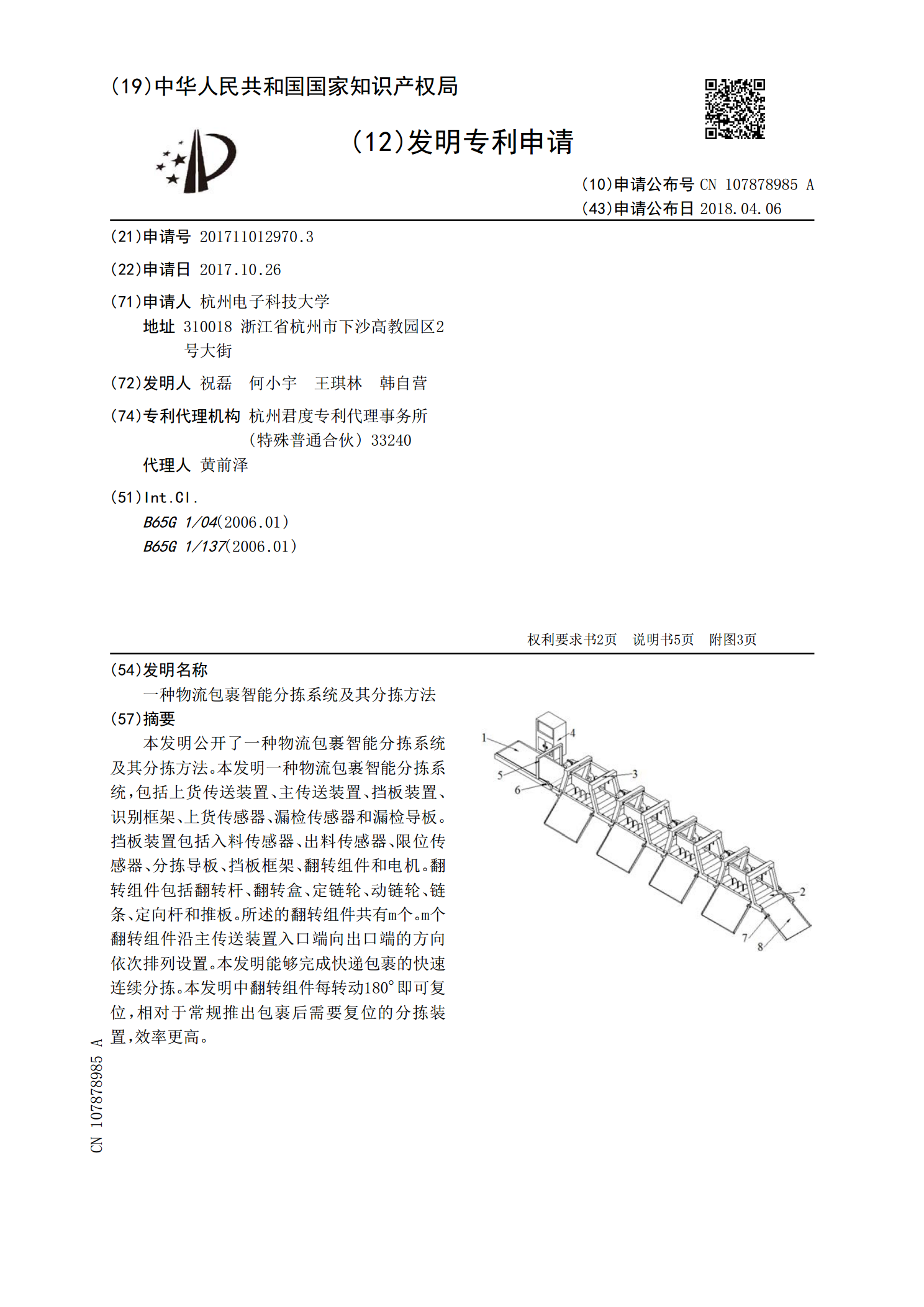
本发明公开了一种物流包裹智能分拣系统及其分拣方法。本发明一种物流包裹智能分拣系统,包括上货传送装置、主传送装置、挡板装置、识别框架、上货传感器、漏检传感器和漏检导板。挡板装置包括入料传感器、出料传感器、限位传感器、分拣导板、挡板框架、翻转组件和电机。翻转组件包括翻转杆、翻转盒、定链轮、动链轮、链条、定向杆和推板。所述的翻转组件共有m个。m个翻转组件沿主传送装置入口端向出口端的方向依次排列设置。本发明能够完成快递包裹的快速连续分拣。本发明中翻转组件每转动180°即可复位,相对于常规推出包裹后需要复位的分拣装