
飞行器的飞行控制方法以及应用该方法的飞行系统.pdf

努力****元恺


1/8
2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

飞行器的飞行控制方法以及应用该方法的飞行系统.pdf
本发明公开了一种飞行器的飞行控制方法以及应用该方法的飞行系统,应用在飞行器领域,其技术方案要点是:包括设置于飞行器顶部的安装杆以及连接在安装杆上的安装环,安装环上设有驱动装置;驱动装置:包括滑动连接在安装环上的若干安装板,安装板上设有第一电机,第一电机的输出端上连接有螺旋桨,安装环内侧设有齿形跑道,安装板上设有第二电机,第二电机的输出端上连接有与齿形跑道相啮合的跑动齿;具有的技术效果是:其中一个螺旋桨损坏时,其余螺旋桨仍然可以对飞行器提供平衡的抬升力,避免因正常工作的螺旋桨形成的抬升力不均匀而导致飞行器失
无人飞行器系统、控制装置以及控制方法.pdf
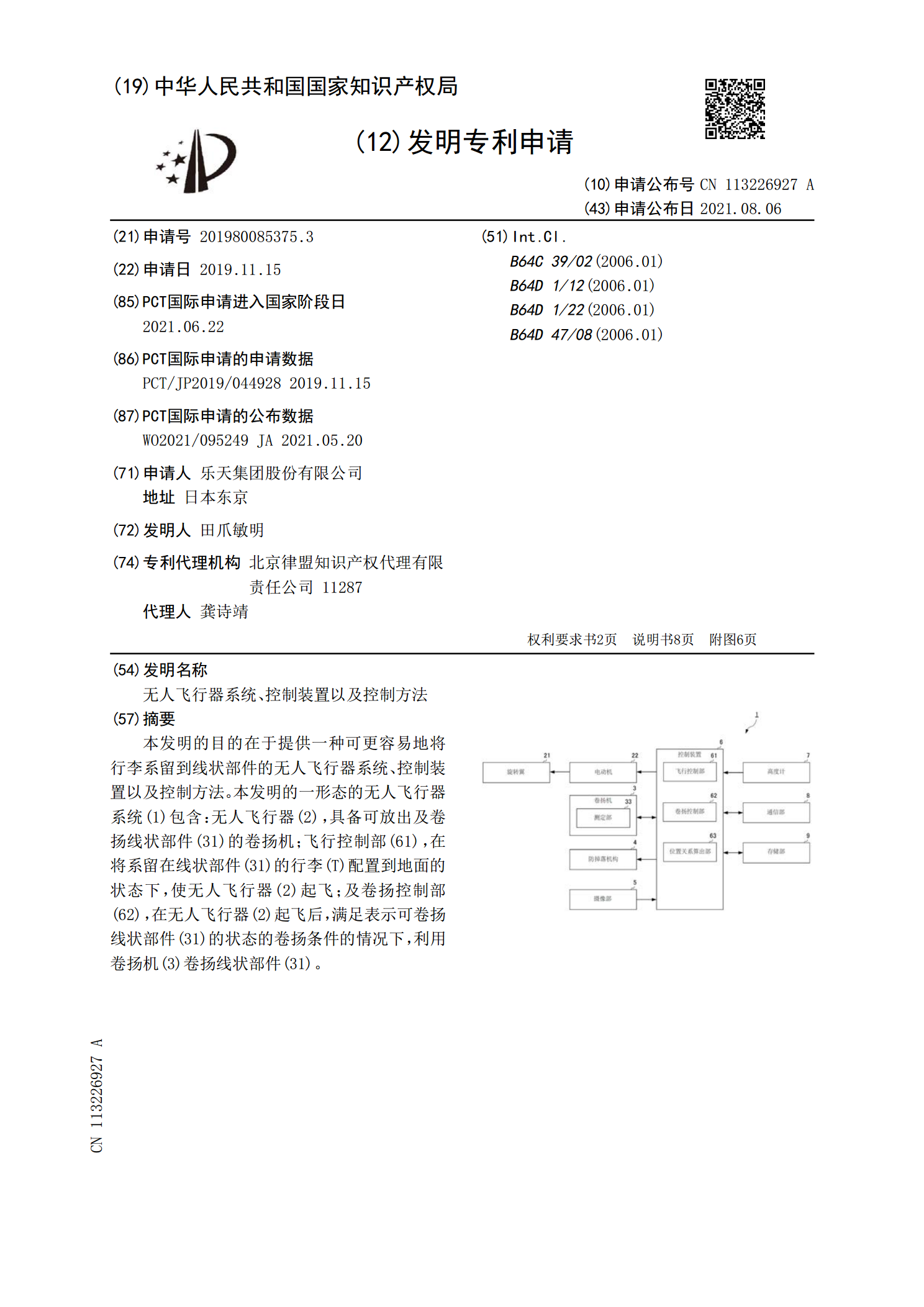
本发明的目的在于提供一种可更容易地将行李系留到线状部件的无人飞行器系统、控制装置以及控制方法。本发明的一形态的无人飞行器系统(1)包含:无人飞行器(2),具备可放出及卷扬线状部件(31)的卷扬机;飞行控制部(61),在将系留在线状部件(31)的行李(T)配置到地面的状态下,使无人飞行器(2)起飞;及卷扬控制部(62),在无人飞行器(2)起飞后,满足表示可卷扬线状部件(31)的状态的卷扬条件的情况下,利用卷扬机(3)卷扬线状部件(31)。

无人飞行器、飞行器控制系统及搬运方法.pdf
本发明提供一种能容易地将搬运物连接到从飞行主体垂下的线状构件的前端部的无人飞行器。本发明的一个形态的无人飞行器(1)具备:飞行主体(2),能飞行;卷扬机(3),设置于所述飞行主体(2),能卷放及卷取线状构件(31);吸附构件(4),设置于所述线状构件(31)的前端部,在与设置于搬运物(T)的具有铁磁性的被吸附部(F)之间产生磁性吸引力;以及保持机构(5),在所述吸附构件(4)与所述被吸附部(F)通过所述磁性吸引力而结合的状态下保持所述搬运物(T)。
飞行器以及应用于飞行器的目标物追踪系统和方法.pdf
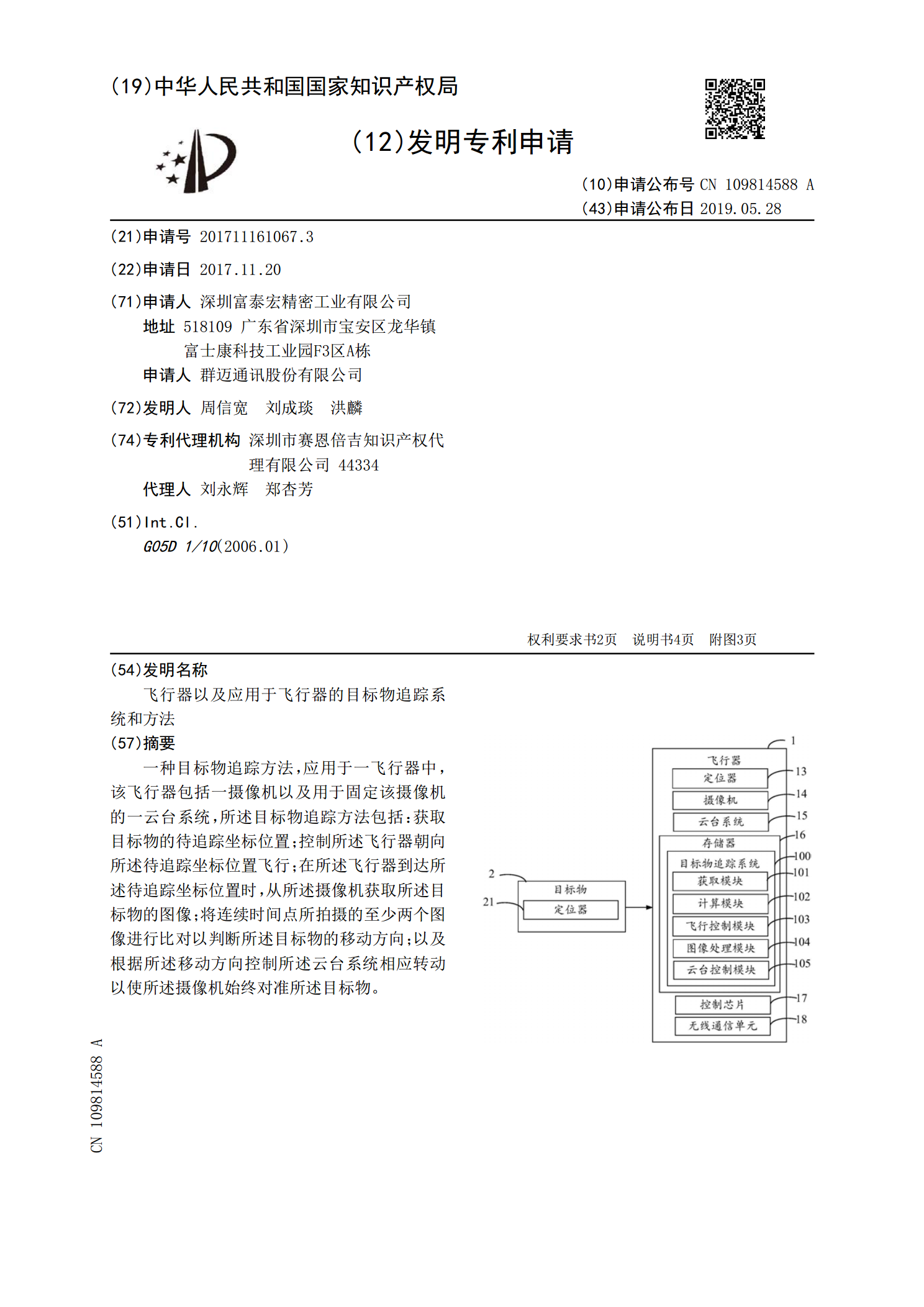
一种目标物追踪方法,应用于一飞行器中,该飞行器包括一摄像机以及用于固定该摄像机的一云台系统,所述目标物追踪方法包括:获取目标物的待追踪坐标位置;控制所述飞行器朝向所述待追踪坐标位置飞行;在所述飞行器到达所述待追踪坐标位置时,从所述摄像机获取所述目标物的图像;将连续时间点所拍摄的至少两个图像进行比对以判断所述目标物的移动方向;以及根据所述移动方向控制所述云台系统相应转动以使所述摄像机始终对准所述目标物。
一种无人飞行器飞行控制方法、系统及无人飞行器.pdf
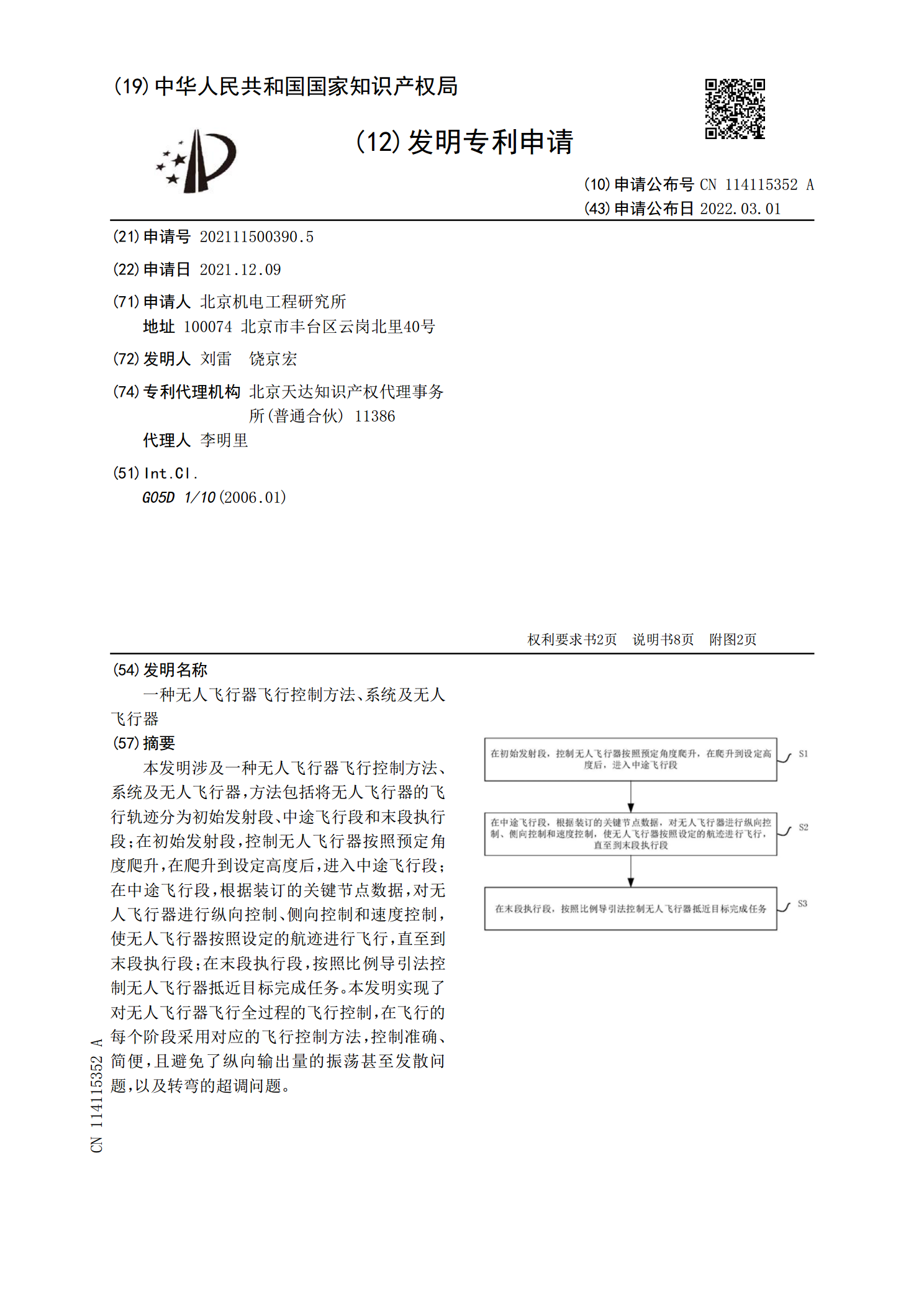
本发明涉及一种无人飞行器飞行控制方法、系统及无人飞行器,方法包括将无人飞行器的飞行轨迹分为初始发射段、中途飞行段和末段执行段;在初始发射段,控制无人飞行器按照预定角度爬升,在爬升到设定高度后,进入中途飞行段;在中途飞行段,根据装订的关键节点数据,对无人飞行器进行纵向控制、侧向控制和速度控制,使无人飞行器按照设定的航迹进行飞行,直至到末段执行段;在末段执行段,按照比例导引法控制无人飞行器抵近目标完成任务。本发明实现了对无人飞行器飞行全过程的飞行控制,在飞行的每个阶段采用对应的飞行控制方法,控制准确、简便,且