
一种基于视觉系统的焊接机器人用定位装置.pdf

一只****呀盟

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于视觉系统的焊接机器人用定位装置.pdf
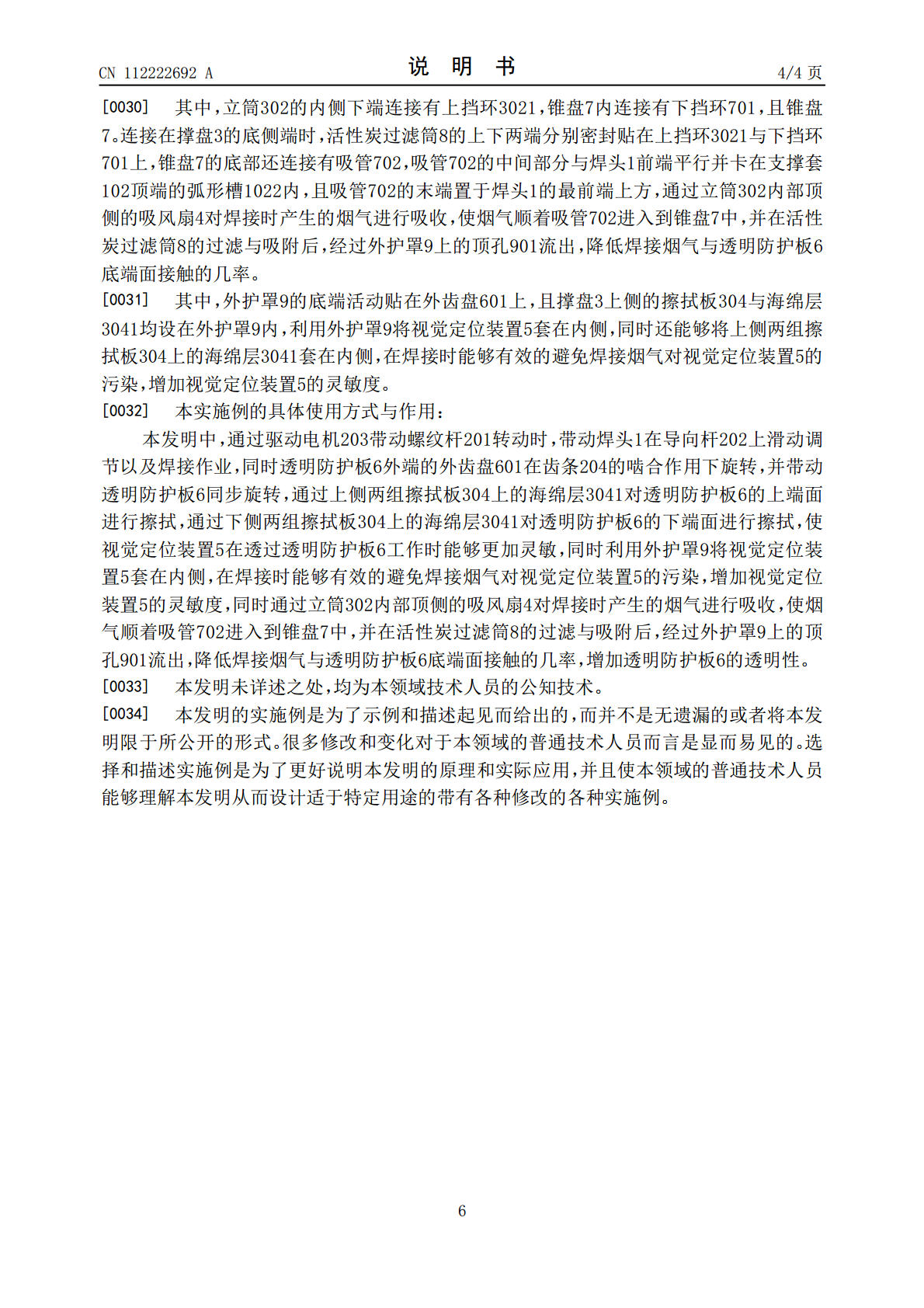
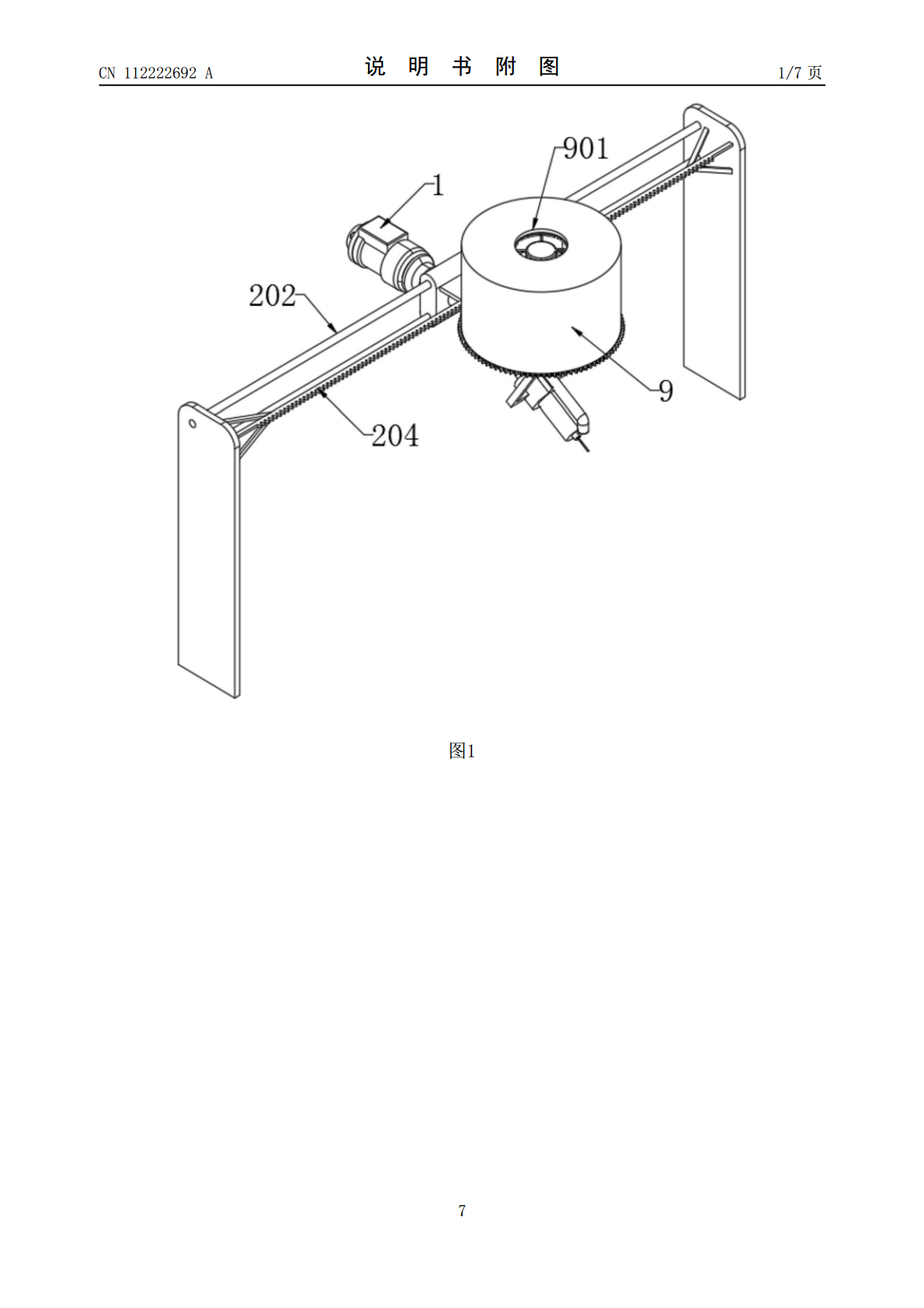
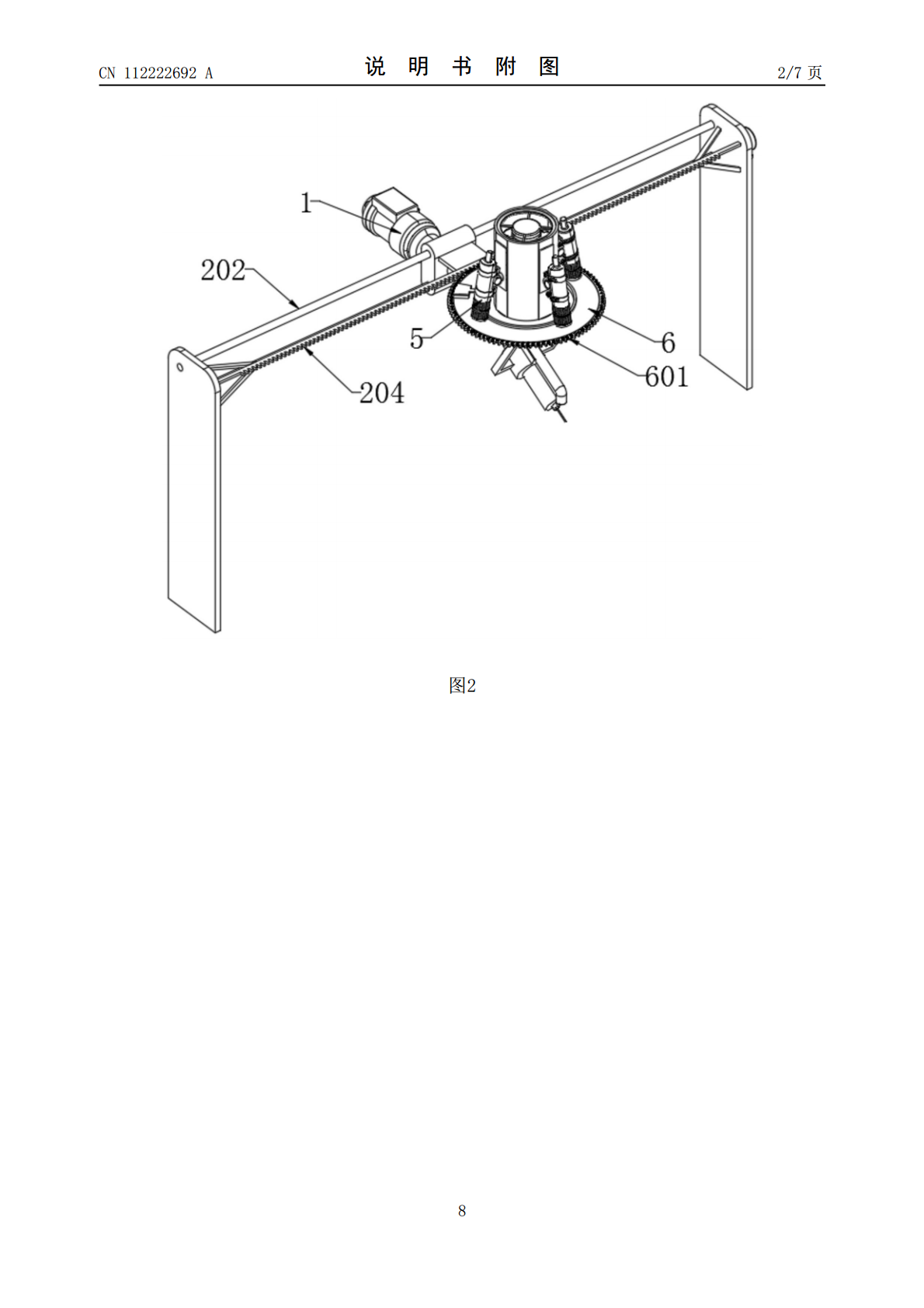
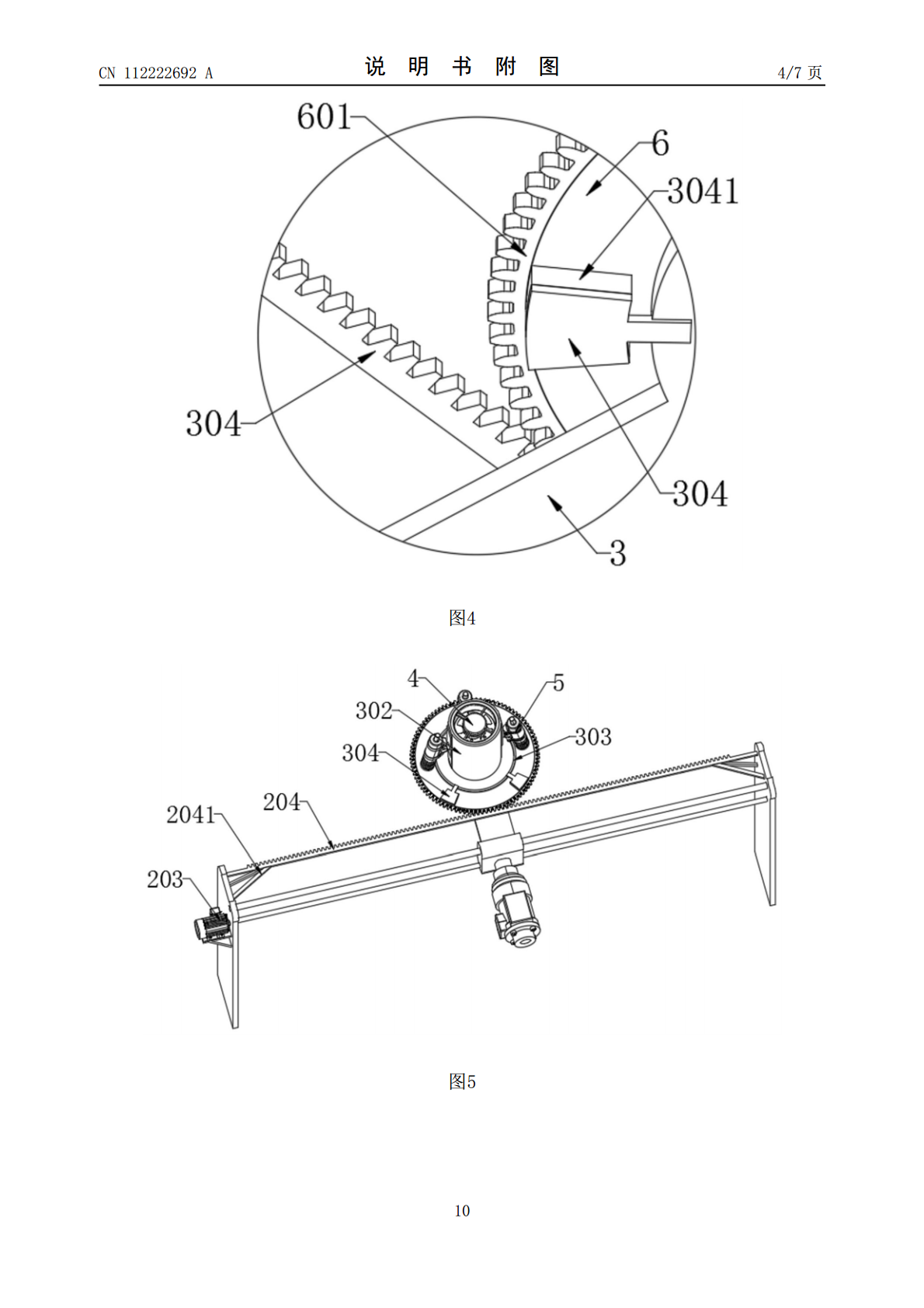
本发明提供一种基于视觉系统的焊接机器人用定位装置,包括焊头,撑盘,锥盘,外护罩;螺纹孔内通过螺纹啮合并穿插有螺纹杆,导向孔内活动穿插有导向杆,所述撑盘的一端与连接块固定连接,且撑盘的底端通过两组撑杆支撑,所述撑盘的中间还设有内孔,内孔的顶端设有立筒,所述立筒的外壁上通过螺栓连接有三组视觉定位装置,且立筒的内部顶端还镶嵌有吸风扇。利用吸风扇对烟气吸收,并通过活性炭过滤筒的过滤与吸附后,经过顶孔流出,通过驱动电机带动焊头在导向杆上滑动调节以及焊接作业,外齿盘在齿条的啮合作用下转动,并带动透明防护板同步旋转,通
一种焊接用机器人视觉定位系统及方法.pdf
本发明提供一种焊接用机器人视觉定位系统,包括电源模块,图像采集单元,光源,图像处理单元,控制单元,焊接模块,机械手臂,壳体,车轮,电机,所述车轮设置在壳体上,所述电机与车轮连接,所述电源模块,图像采集单元,图像处理单元,机械手臂,电机与控制单元连接,所述图像采集单元与图像处理单元连接,图像处理单元将采集到的图像信息发送到控制单元,所述焊接模块设置在机械手臂上,控制单元控制机械手臂,带动焊接模块进行焊接。本发明的焊接用机器人视觉定位系统,能够准确提取焊接位置点,执行速度快,有效解决了人工焊接和固定式的焊接机
一种视觉定位激光焊接装置.pdf
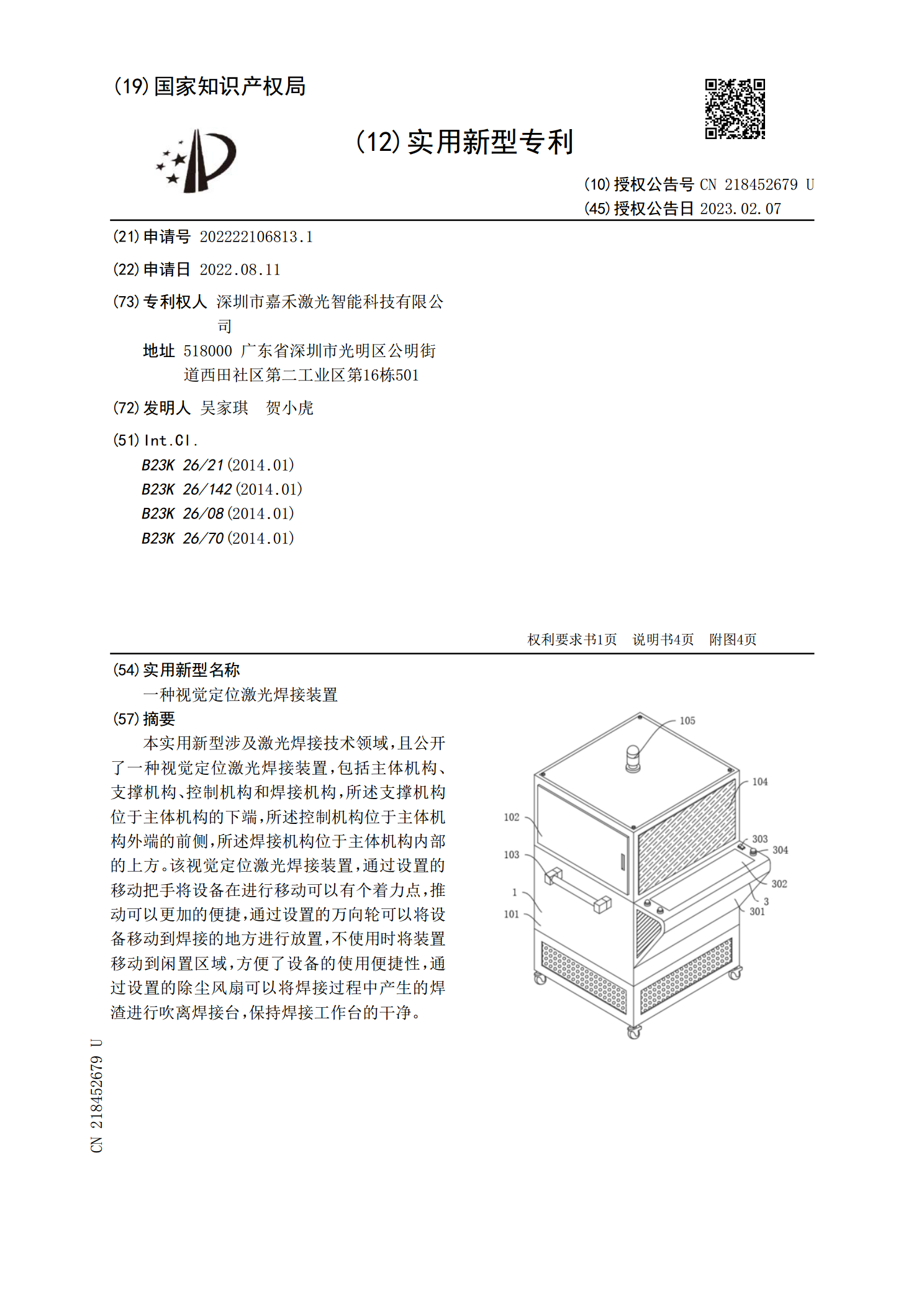
本实用新型涉及激光焊接技术领域,且公开了一种视觉定位激光焊接装置,包括主体机构、支撑机构、控制机构和焊接机构,所述支撑机构位于主体机构的下端,所述控制机构位于主体机构外端的前侧,所述焊接机构位于主体机构内部的上方。该视觉定位激光焊接装置,通过设置的移动把手将设备在进行移动可以有个着力点,推动可以更加的便捷,通过设置的万向轮可以将设备移动到焊接的地方进行放置,不使用时将装置移动到闲置区域,方便了设备的使用便捷性,通过设置的除尘风扇可以将焊接过程中产生的焊渣进行吹离焊接台,保持焊接工作台的干净。

基于机械视觉的机器人定位系统.docx
参赛队伍抽签号:第七届“盛群”杯天津市大学生单片机应用设计竞赛技术报告书参赛队伍编号:12TJ-2515作品名称:基于机器视觉的机器人定位系统参赛学生:姓名学校专业年级周涛的河北工业大学自动化三孙柏岩河北工业大学自动化三王丛林河北工业大学自动化三朱亚男河北工业大学自动化三指导老师:姓名学校学院(系)梁涛河北工业大学控制科学与工程(自动化)联络人:姓名:周涛的电话:地址:天津市红桥区光荣道八号Email:提交日期:2012年12月18日目录一、摘要……………………………………………………3二、作品介绍………

一种焊接定位装置用端面定位装置.pdf
本发明公开了一种焊接定位装置用端面定位装置,包括固定框,所述固定框的下端固定有端板,所述端板的上端面均匀设有限位块,端板的下端面安装有定位工装,所述定位工装的四周均设有限位板,所限位板的上端通过螺栓固定的方式固定有L型板,所述L型板的上端均固定有垂直于端板上端面的圆柱直齿条,所述端板上端的左、右两侧通过轴承定位的方式安装有传动轴,所述传动轴的两端均通过键连接的方式固定有提升齿轮,所述传动轴上均通过键连接的方式固定有从动锥齿轮,所述端板上安装有驱动机构。本发明具有使用方便、生产制造成本低等优点,能实现对提升