
自消除步态累积误差的压电电机以及驱动方法.pdf

代瑶****zy


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
自消除步态累积误差的压电电机以及驱动方法.pdf
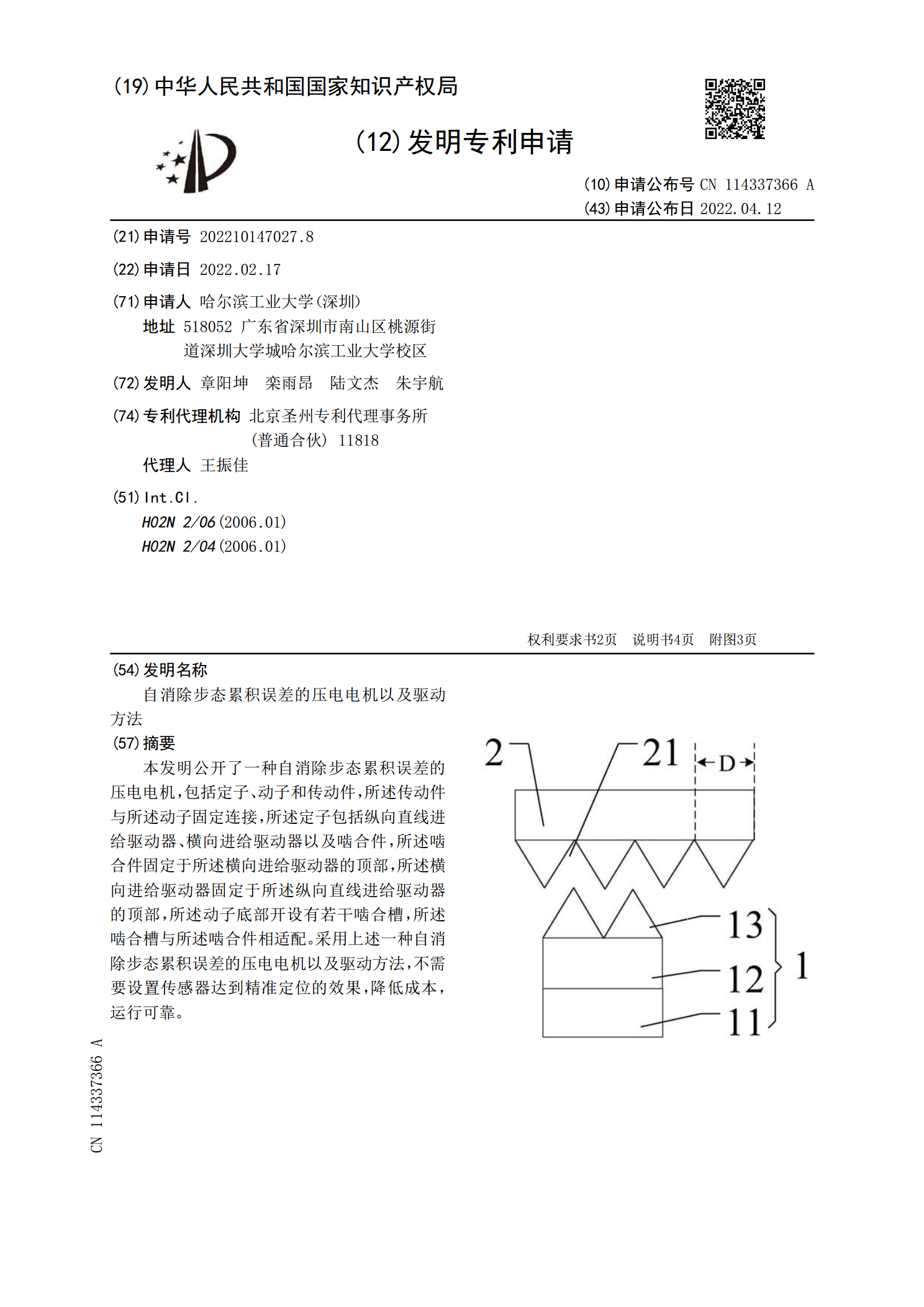
本发明公开了一种自消除步态累积误差的压电电机,包括定子、动子和传动件,所述传动件与所述动子固定连接,所述定子包括纵向直线进给驱动器、横向进给驱动器以及啮合件,所述啮合件固定于所述横向进给驱动器的顶部,所述横向进给驱动器固定于所述纵向直线进给驱动器的顶部,所述动子底部开设有若干啮合槽,所述啮合槽与所述啮合件相适配。采用上述一种自消除步态累积误差的压电电机以及驱动方法,不需要设置传感器达到精准定位的效果,降低成本,运行可靠。
一种增减材制造过程累积误差消除方法.pdf
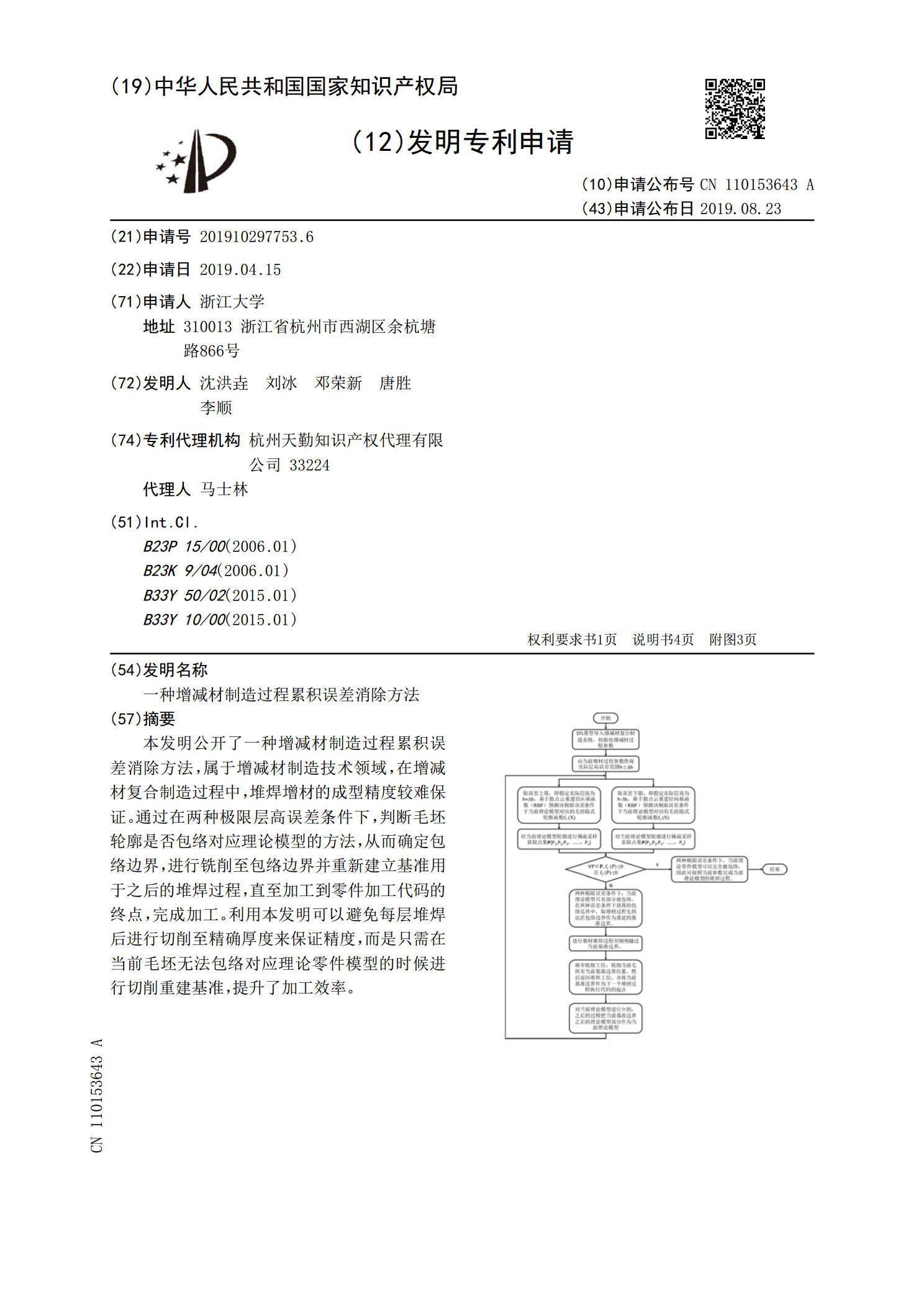
本发明公开了一种增减材制造过程累积误差消除方法,属于增减材制造技术领域,在增减材复合制造过程中,堆焊增材的成型精度较难保证。通过在两种极限层高误差条件下,判断毛坯轮廓是否包络对应理论模型的方法,从而确定包络边界,进行铣削至包络边界并重新建立基准用于之后的堆焊过程,直至加工到零件加工代码的终点,完成加工。利用本发明可以避免每层堆焊后进行切削至精确厚度来保证精度,而是只需在当前毛坯无法包络对应理论零件模型的时候进行切削重建基准,提升了加工效率。

自动消除累积误差的带料送料机构.pdf
一种自动消除累积误差的带料送料机构,它包括机架,机架上设有输送辊和主动碾辊,主动碾辊由电机带动,主动碾辊上还穿置一个主动齿轮,其特征在于机架上设有滑块,在滑块上有被动碾辊,被动碾辊上有被动齿轮,上述滑块上设有消间隙弹簧,上述滑块连接一个拉杆,拉杆上穿置一个回复弹簧,拉杆还连接一个压杆。本发明的自动消除累积误差的带料送料机构具有结构简单、输送精度高,同时具有自动消除带料输送过程中的累积误差的特点。
电机驱动控制装置、电机单元以及电机驱动控制方法.pdf
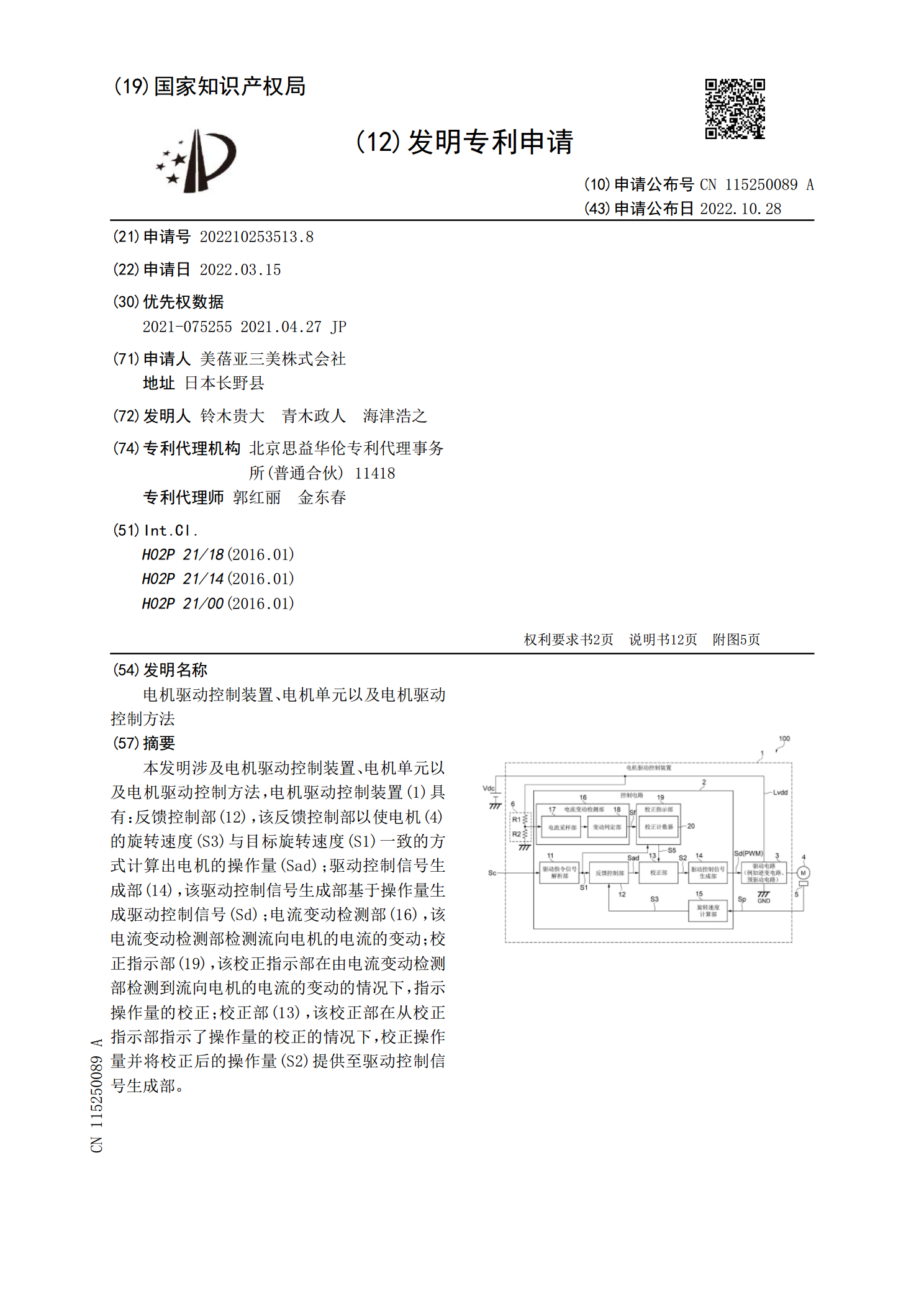
本发明涉及电机驱动控制装置、电机单元以及电机驱动控制方法,电机驱动控制装置(1)具有:反馈控制部(12),该反馈控制部以使电机(4)的旋转速度(S3)与目标旋转速度(S1)一致的方式计算出电机的操作量(Sad);驱动控制信号生成部(14),该驱动控制信号生成部基于操作量生成驱动控制信号(Sd);电流变动检测部(16),该电流变动检测部检测流向电机的电流的变动;校正指示部(19),该校正指示部在由电流变动检测部检测到流向电机的电流的变动的情况下,指示操作量的校正;校正部(13),该校正部在从校正指示部指示了

步进电机驱动转台误差分析及改进方法.docx
步进电机驱动转台误差分析及改进方法步进电机是一种常用的电动转台驱动器,广泛应用于工业自动化、机器人、数控设备等领域。然而,在实际应用过程中,步进电机驱动转台往往存在一定的误差,影响到其精度和性能。本文将针对步进电机驱动转台误差进行分析,并提出改进方法,以提高步进电机转台的准确性和稳定性。一、步进电机驱动转台误差分析:步进电机驱动转台误差通常由以下几个方面引起:1.步进电机本身精度:步进电机的精度决定了转台的转动精度。一般情况下,步进电机的精度较高,但仍存在一定的误差。这主要是由于步进电机的结构限制、磁阻、