
一种用于收敛、沉降监测的阵列式位移计监测方法及系统.pdf

依波****bc


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于收敛、沉降监测的阵列式位移计监测方法及系统.pdf
本发明公开了一种用于收敛、沉降监测的阵列式位移计监测方法及系统,涉及隧道安全监测技术领域,包括监测节点、沉降分析模块以及运维管理模块;监测节点用于监测隧道各个测点区域的变形信息;所述监测中心用于对当前变形信息进行预处理,并将预处理后的变形信息传输至沉降分析模块进行安全性分析,确定各个测点区域是否存在沉降威胁,从而分配对应的工程人员对隧道进行检修加固,维护隧道安全;当接收到沉降检修任务后,所述运维管理模块用于调取对应测点区域的潜在威胁关联数据进行融合分析,智能评估对应测点区域的威胁等级WX,并根据威胁等级W
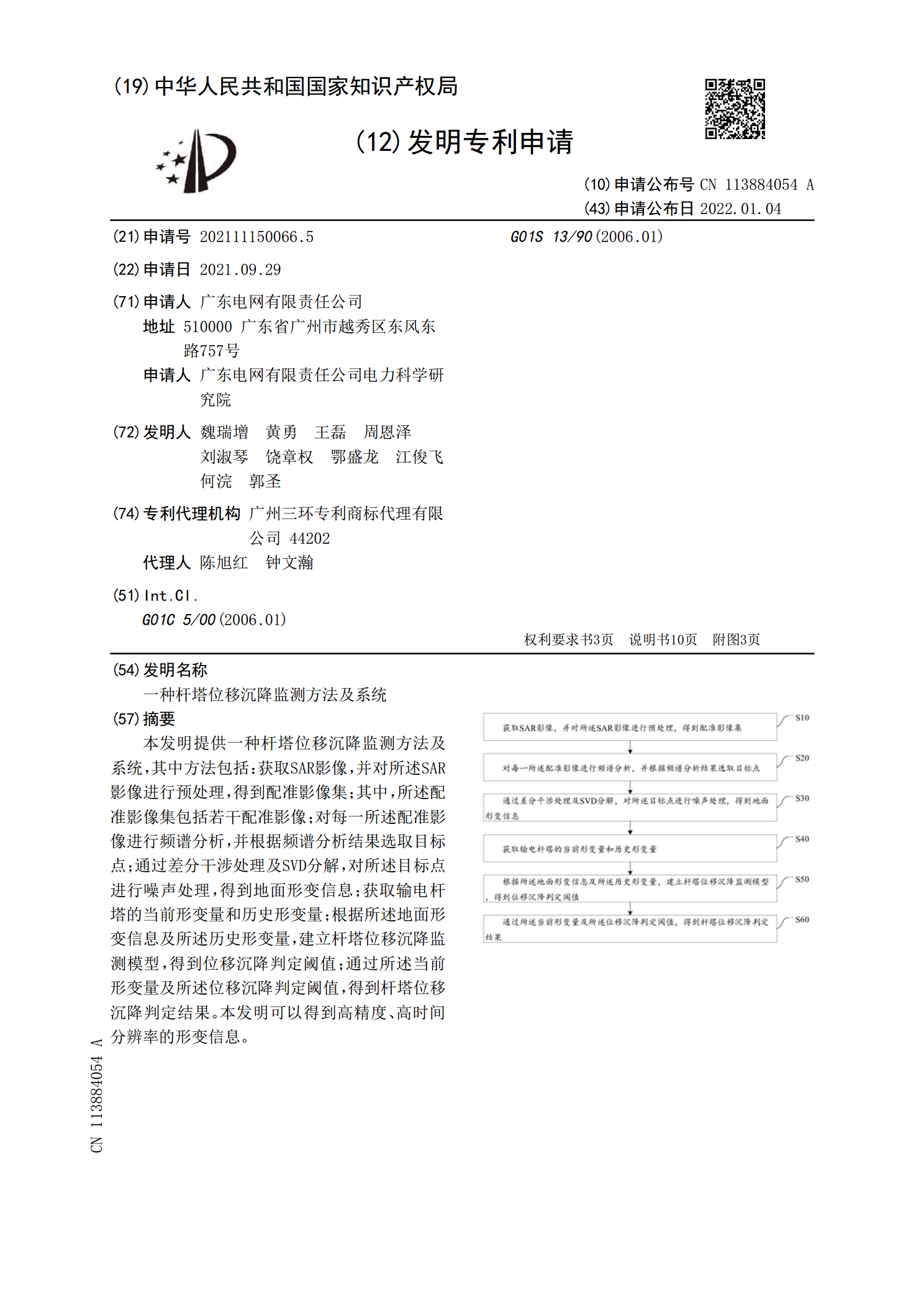
一种杆塔位移沉降监测方法及系统.pdf
本发明提供一种杆塔位移沉降监测方法及系统,其中方法包括:获取SAR影像,并对所述SAR影像进行预处理,得到配准影像集;其中,所述配准影像集包括若干配准影像;对每一所述配准影像进行频谱分析,并根据频谱分析结果选取目标点;通过差分干涉处理及SVD分解,对所述目标点进行噪声处理,得到地面形变信息;获取输电杆塔的当前形变量和历史形变量;根据所述地面形变信息及所述历史形变量,建立杆塔位移沉降监测模型,得到位移沉降判定阈值;通过所述当前形变量及所述位移沉降判定阈值,得到杆塔位移沉降判定结果。本发明可以得到高精度、高时
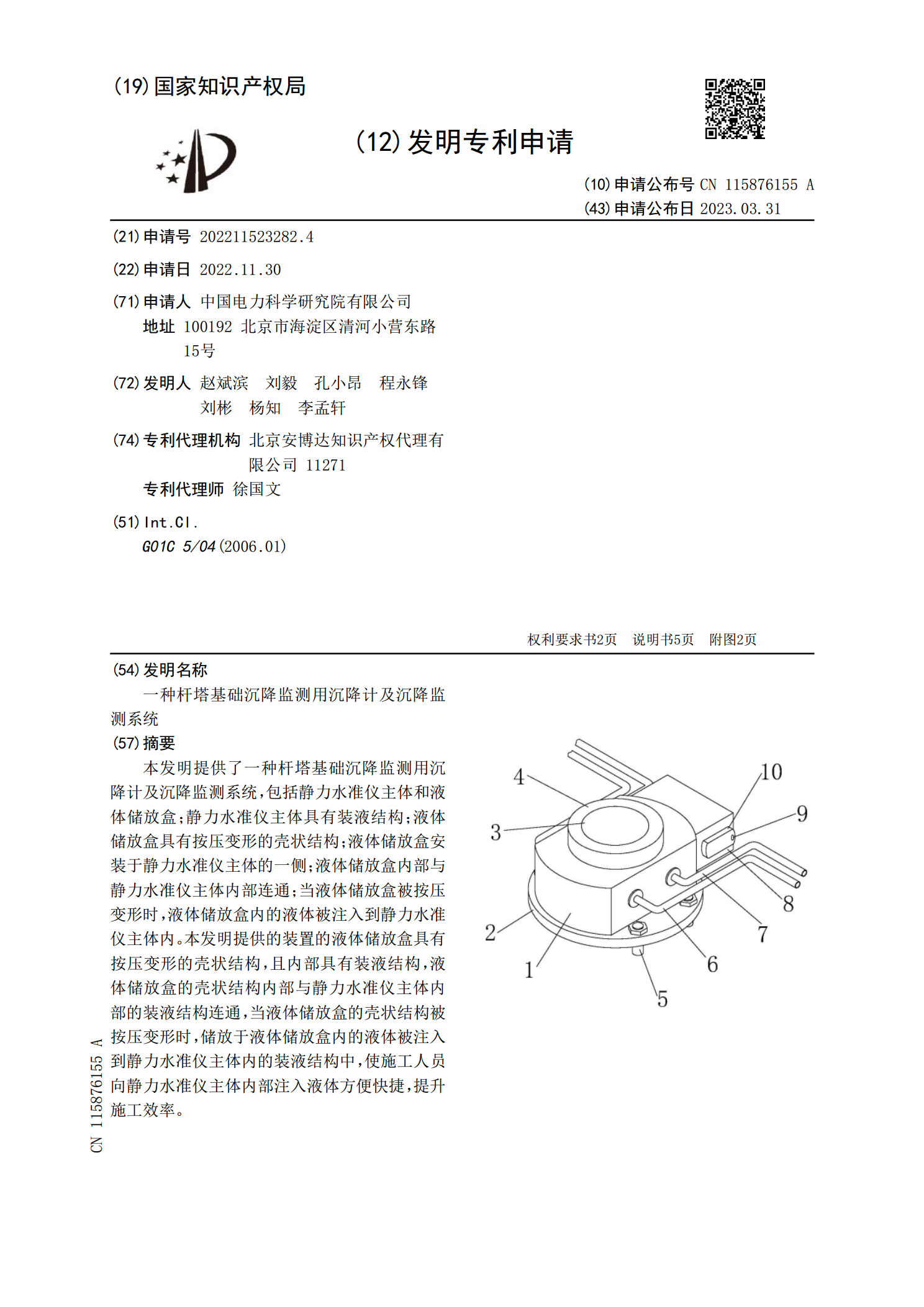
一种杆塔基础沉降监测用沉降计及沉降监测系统.pdf
本发明提供了一种杆塔基础沉降监测用沉降计及沉降监测系统,包括静力水准仪主体和液体储放盒;静力水准仪主体具有装液结构;液体储放盒具有按压变形的壳状结构;液体储放盒安装于静力水准仪主体的一侧;液体储放盒内部与静力水准仪主体内部连通;当液体储放盒被按压变形时,液体储放盒内的液体被注入到静力水准仪主体内。本发明提供的装置的液体储放盒具有按压变形的壳状结构,且内部具有装液结构,液体储放盒的壳状结构内部与静力水准仪主体内部的装液结构连通,当液体储放盒的壳状结构被按压变形时,储放于液体储放盒内的液体被注入到静力水准仪主
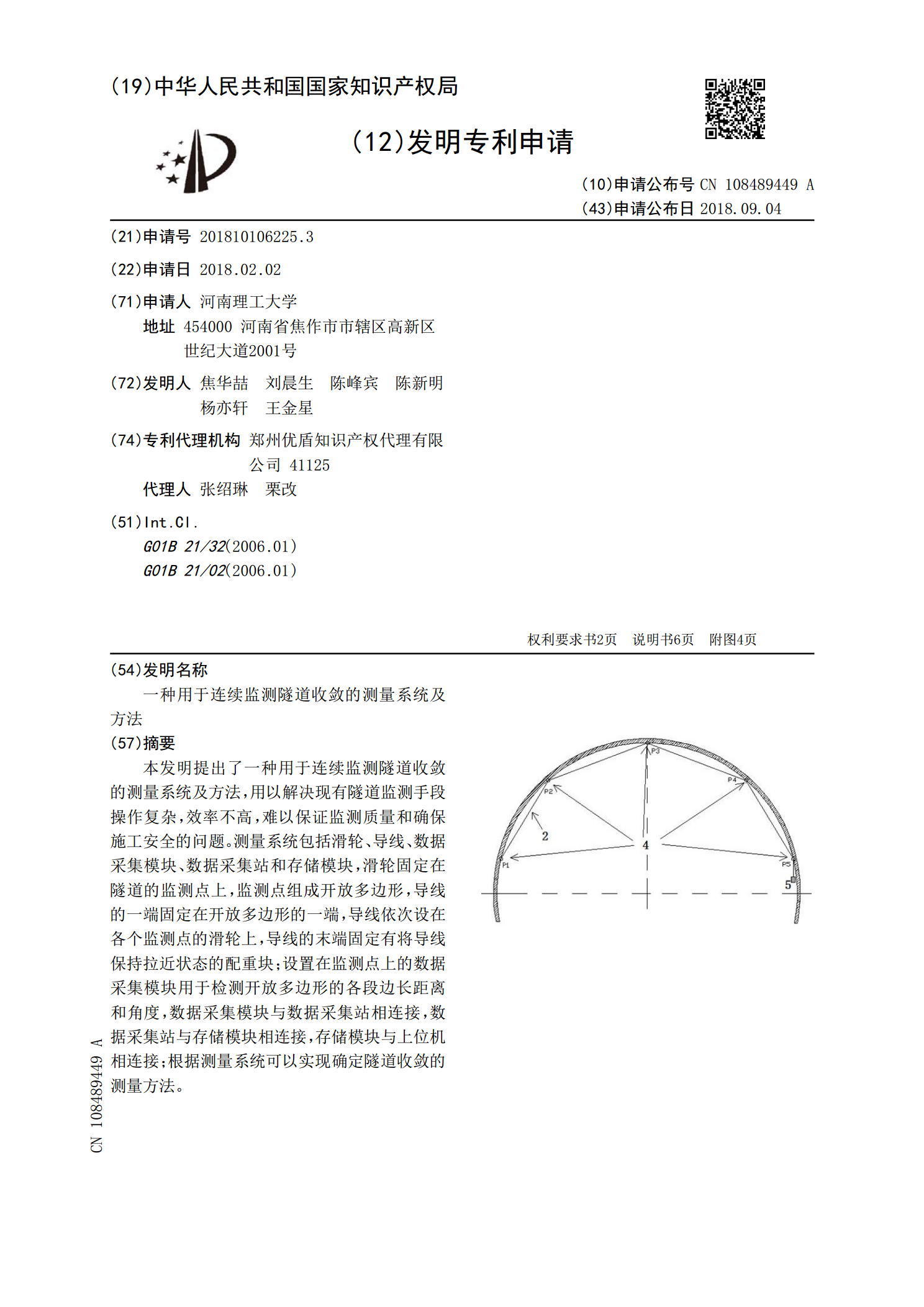
一种用于连续监测隧道收敛的测量系统及方法.pdf
本发明提出了一种用于连续监测隧道收敛的测量系统及方法,用以解决现有隧道监测手段操作复杂,效率不高,难以保证监测质量和确保施工安全的问题。测量系统包括滑轮、导线、数据采集模块、数据采集站和存储模块,滑轮固定在隧道的监测点上,监测点组成开放多边形,导线的一端固定在开放多边形的一端,导线依次设在各个监测点的滑轮上,导线的末端固定有将导线保持拉近状态的配重块;设置在监测点上的数据采集模块用于检测开放多边形的各段边长距离和角度,数据采集模块与数据采集站相连接,数据采集站与存储模块相连接,存储模块与上位机相连接;根据

基坑位移与沉降监测方法研究.docx
基坑位移与沉降监测方法研究随着建筑行业的不断发展,基坑工程越来越多地应用于城市建设中。然而,由于基坑施工过程中涉及大量土方开挖和土体膨胀等工作,容易造成周围环境的地质变形和建筑物的沉降问题。因此,基坑位移与沉降的监测工作一直是建筑行业所关注的重要问题。在基坑工程的施工过程中,地基的稳定性是首要考虑的问题。如果地基稳定性不佳,可能会导致基坑周围地下水位上升、基坑出现变形等问题。因此,对基坑周围地下水位和土体位移沉降的监测工作同样也十分重要。基坑位移监测方法:为了监测基坑的地表变形,通常采用激光位移仪和全站仪