
一种回转体相贯线切割焊接装置.pdf

努力****承悦


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种回转体相贯线切割焊接装置.pdf
本发明公开了一种回转体相贯线切割焊接装置,涉及回转体切割焊接设备制造领域,包括上下定位系统、轴向移动系统、切割系统、控制系统;上下定位系统包括步进电机B(8)、丝杠(9)、螺母(7)、移动副(4)和齿轮架(3);切割系统包括步进电机A(6)、小齿轮(5)、大齿圈(2)、切割执行头夹具(11)、等离子切割机喷嘴(1)、滚子(10);轴向移动系统包括步进电机C(15)、丝杠(14)、螺母(13)、回转体定位平台(12)、移动副(16)。本发明操作简便、加工精度高、制作成本低。

管子相贯线切割装置.pdf
本发明公开了一种管子相贯线切割装置,包括支架和控制装置,所述支架上设有支撑筒,所述支撑筒外表面周向上设有环状的周向导轨,所述周向导轨上设有连接座,所述连接座与所述支撑筒之间设有伺服驱动所述连接座沿所述周向导轨滑动的旋转驱动装置;所述连接座上设有平行于所述支撑筒中心线的纵向导轨,所述纵向导轨上滑动设有割具固定装置,所述连接座上设有伺服驱动所述割具固定装置沿所述纵向导轨滑动的纵向驱动装置,所述旋转驱动装置和纵向驱动装置连接所述控制装置。本发明操作简单、使用方便、切割精度高、加工效率高,降低了劳动强度和对操作水

一种弯管相贯线切割装置.pdf
本发明涉及一种弯管相贯线切割装置,其特征在于:它包括回转机头、回转机头伺服电机、伸缩臂、溜板、滚珠丝杆、机架、机架导轨、左右移动轴伺服电机、左右移动轴电机齿轮、左右移动轴齿条、弯柄割枪、偏心回转臂、上下移动轴伺服电机、伸缩轴齿条、伸缩轴伺服电机、伸缩轴电机齿轮;所述回转机头的外壳固定在伸缩臂的前端;偏心回转臂固定在回转机头主轴上,弯柄割枪固定在偏心回转臂下端;伸缩臂上装有直线导轨和齿条,直线导轨滑块及伸缩轴伺服电机都固定在溜板上。本发明通过通过回转机头、偏心回转臂以及伸缩臂等的设计,使装置的结构设计简单,

一种等离子相贯线切割装置.pdf
本发明提供一种等离子相贯线切割装置,包括机架、用于固定工件的定位机构、切割器以及用于驱动切割器以相贯线轨迹运动的模具机构,所述模具机构包括相贯线轮廓槽、与相贯线轮廓槽滑动配合的滑动组件以及用于驱动滑动组件相贯线轮廓槽运动的驱动机构,所述切割器安装在滑动组件上,且所述切割器位于定位机构的上方以便切割器随滑动组件运动在工件上加工出相贯线。本发明通过模具控制切割器以相贯线的轨迹运动,从而在工件上加工出相贯线。
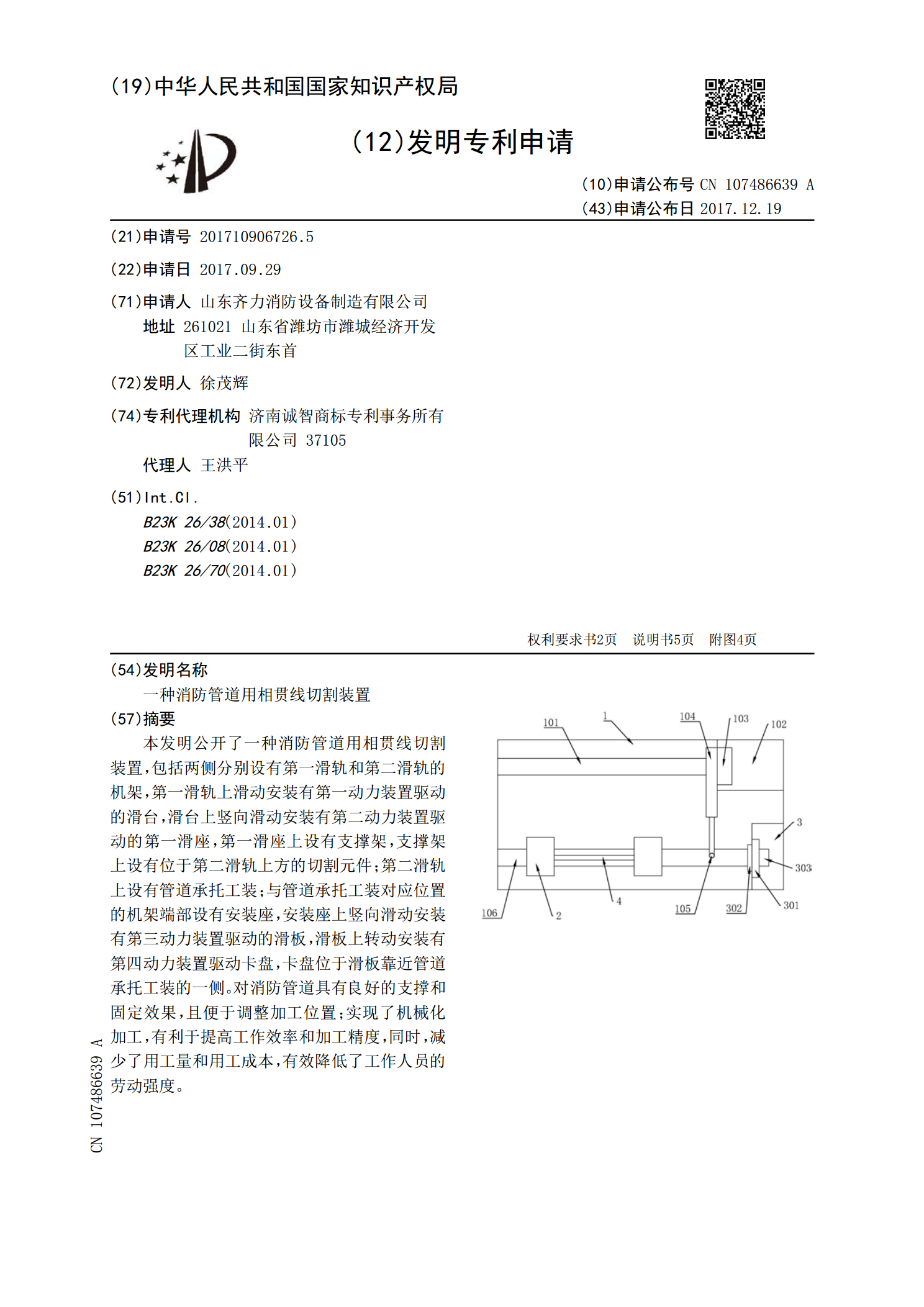
一种消防管道用相贯线切割装置.pdf
本发明公开了一种消防管道用相贯线切割装置,包括两侧分别设有第一滑轨和第二滑轨的机架,第一滑轨上滑动安装有第一动力装置驱动的滑台,滑台上竖向滑动安装有第二动力装置驱动的第一滑座,第一滑座上设有支撑架,支撑架上设有位于第二滑轨上方的切割元件;第二滑轨上设有管道承托工装;与管道承托工装对应位置的机架端部设有安装座,安装座上竖向滑动安装有第三动力装置驱动的滑板,滑板上转动安装有第四动力装置驱动卡盘,卡盘位于滑板靠近管道承托工装的一侧。对消防管道具有良好的支撑和固定效果,且便于调整加工位置;实现了机械化加工,有利于