
一种弧齿锥齿轮设计方法.pdf

是湛****21


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种弧齿锥齿轮设计方法.pdf
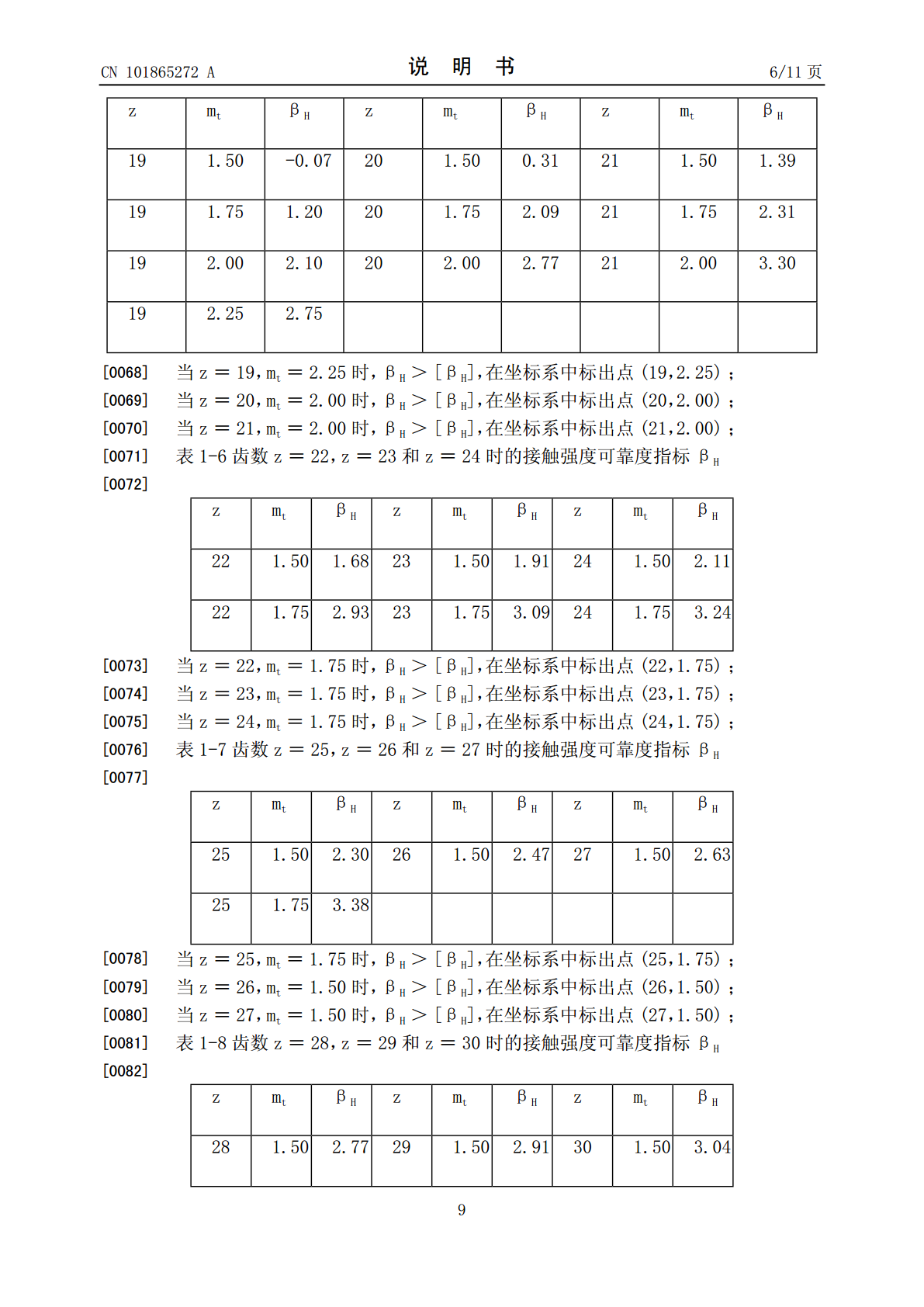
本发明涉及一种弧齿锥齿轮设计方法,技术特征在于:以小弧齿锥齿轮齿数z为横坐标,大端端面模数mi为纵坐标建立坐标系,根据接触强度约束条件和弯曲强度约束条件,各绘制出一条满足其临界条件的齿数-模数曲线,这两条曲线上方的公共区域就是满足强度可靠性要求的可行域。在此基础上,标出特定齿数下齿轮的纵向重合度,那么在同时满足纵向重合度约束条件的可行域内,就有齿轮传动的最优解。接着绘出一条预设体积所对应的齿数-模数曲线,通过不断改变预设体积值,找到体积最小的离散最优解。本方法提出的齿轮可靠性优化方法突破了传统的可靠性优化
弧齿锥齿轮的加工方法.pdf
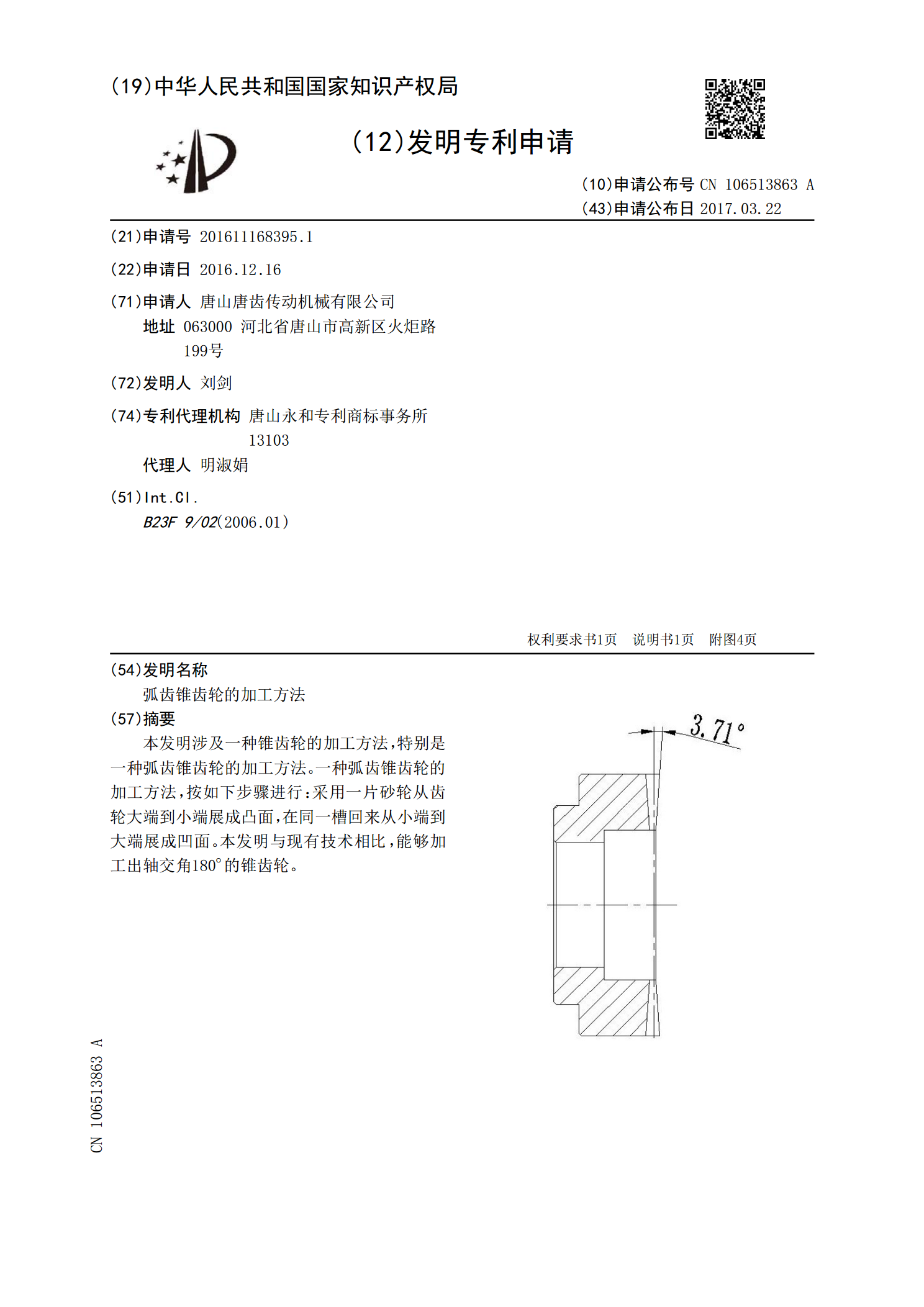
本发明涉及一种锥齿轮的加工方法,特别是一种弧齿锥齿轮的加工方法。一种弧齿锥齿轮的加工方法,按如下步骤进行:采用一片砂轮从齿轮大端到小端展成凸面,在同一槽回来从小端到大端展成凹面。本发明与现有技术相比,能够加工出轴交角180°的锥齿轮。
一种弧齿锥齿轮复合传动误差设计方法.pdf
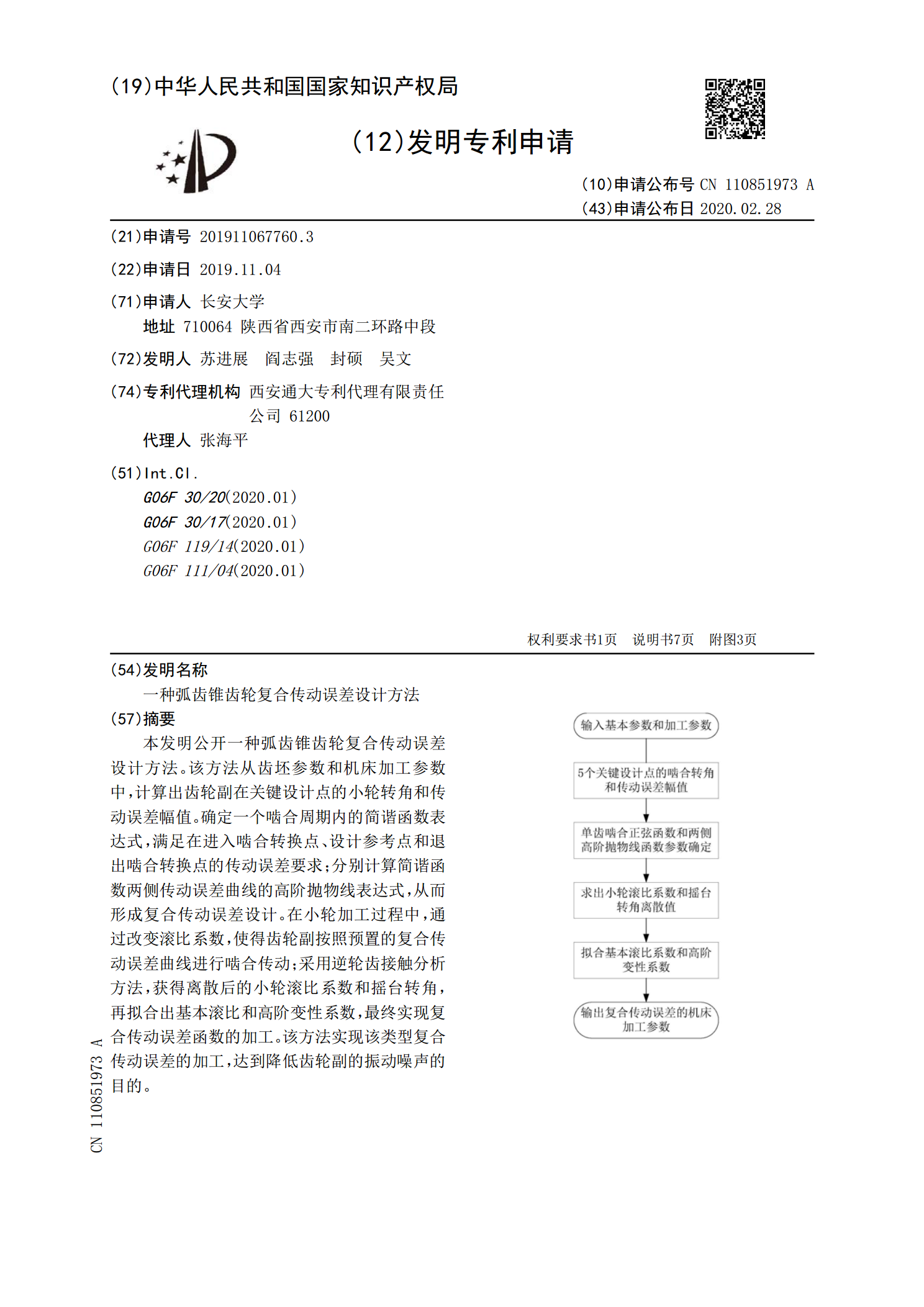
本发明公开一种弧齿锥齿轮复合传动误差设计方法。该方法从齿坯参数和机床加工参数中,计算出齿轮副在关键设计点的小轮转角和传动误差幅值。确定一个啮合周期内的简谐函数表达式,满足在进入啮合转换点、设计参考点和退出啮合转换点的传动误差要求;分别计算简谐函数两侧传动误差曲线的高阶抛物线表达式,从而形成复合传动误差设计。在小轮加工过程中,通过改变滚比系数,使得齿轮副按照预置的复合传动误差曲线进行啮合传动;采用逆轮齿接触分析方法,获得离散后的小轮滚比系数和摇台转角,再拟合出基本滚比和高阶变性系数,最终实现复合传动误差函数

弧齿锥齿轮几何参数设计.doc
精选资料可修改编辑THANKS!!!致力为企业和个人提供合同协议,策划案计划书,学习课件等等打造全网一站式需求欢迎您的下载,资料仅供参考,如有侵权联系删除!
渐开弧面齿廓的直齿锥齿轮的设计方法及齿轮啮合副.pdf
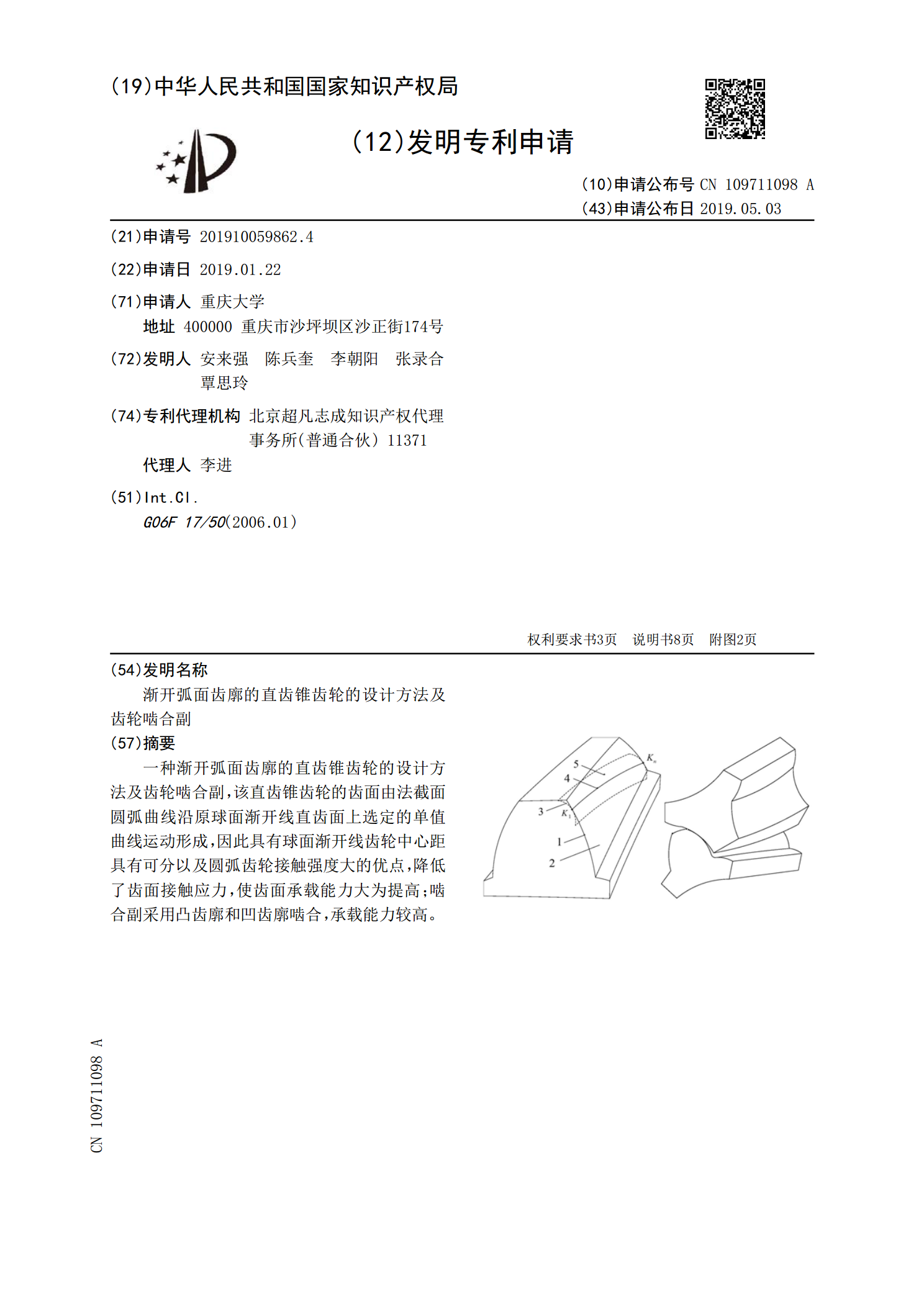
一种渐开弧面齿廓的直齿锥齿轮的设计方法及齿轮啮合副,该直齿锥齿轮的齿面由法截面圆弧曲线沿原球面渐开线直齿面上选定的单值曲线运动形成,因此具有球面渐开线齿轮中心距具有可分以及圆弧齿轮接触强度大的优点,降低了齿面接触应力,使齿面承载能力大为提高;啮合副采用凸齿廓和凹齿廓啮合,承载能力较高。