
大蒜种植机.pdf

一吃****书竹


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

大蒜种植机.pdf
本发明公开了一种大蒜种植机,与拖拉机配套使用,包括机架,所述机架前端固定安装有与所述拖拉机动力连接的传动箱,所述传动箱通过链轮动力连接有松土器,所述机架中部固定安装有取种装置,所述取种装置下方安装有接种斗,所述接种斗下方设有蒜瓣扶正种植装置,所述蒜瓣扶正种植装置动力连接有传动机构,所述传动机构动力连接有地轮;本发明能实现蒜种自动单粒播种喂料,蒜种落下时的瓣尖向上控制,蒜种入土时的瓣尖直立控制、落种过程中的防堵、防损伤。

大蒜自动种植机.pdf
本发明涉及一种大蒜自动种植机,属于农业机械技术领域,机架上部固定种箱和排种器,种箱的出口与排种器的入口相对应,排种器的排种出口与上定向斗相对应,上定向斗下方对应设置下定向斗,对应上定向斗和下定向斗在其后部设置定向斗打开装置和定向斗打开传动装置,下定向斗下方对应设置接料斗,接料斗下方固定立直播种转盘,接料斗的出口与设置在立直播种转盘上的鸭嘴相对应,立直播种转盘下方设置凸轮,机架通过地轮支撑架连接地轮,机架的后部设置镇压轮,机架的前部下方设置平土装置,机架上设置悬挂架。本结构简单,实现了大蒜的机械自动种植,降

多功能大蒜种植机.pdf
本发明的多功能大蒜种植机,包括机架、前轮、后轮、蓄电池、驱动机构和播种机构,特征在于:播种机构由料盒、分蒜盘、下蒜盘、导蒜槽和入地管组成,分蒜盘上固定有将单个蒜瓣拨下的弧形拨片;入地管的下端铰接有两个尖头半片,以便蒜瓣落入泥土之中;入地管上固定有挡杆,动力轴上固定有对挡杆进行周期性施压的拨杆,以便动力轴转动过程中,入地管上下往复运动。本发明的大蒜种植机,蒜瓣落入导蒜槽上之后经其调向作用,使得蒜瓣以发芽端朝向的形式落下,入地管中的刷毛对下落的蒜瓣再次“调向”,确保发芽端朝上,解决了大蒜机械种植时很难确保发芽
一种大蒜种植机.pdf
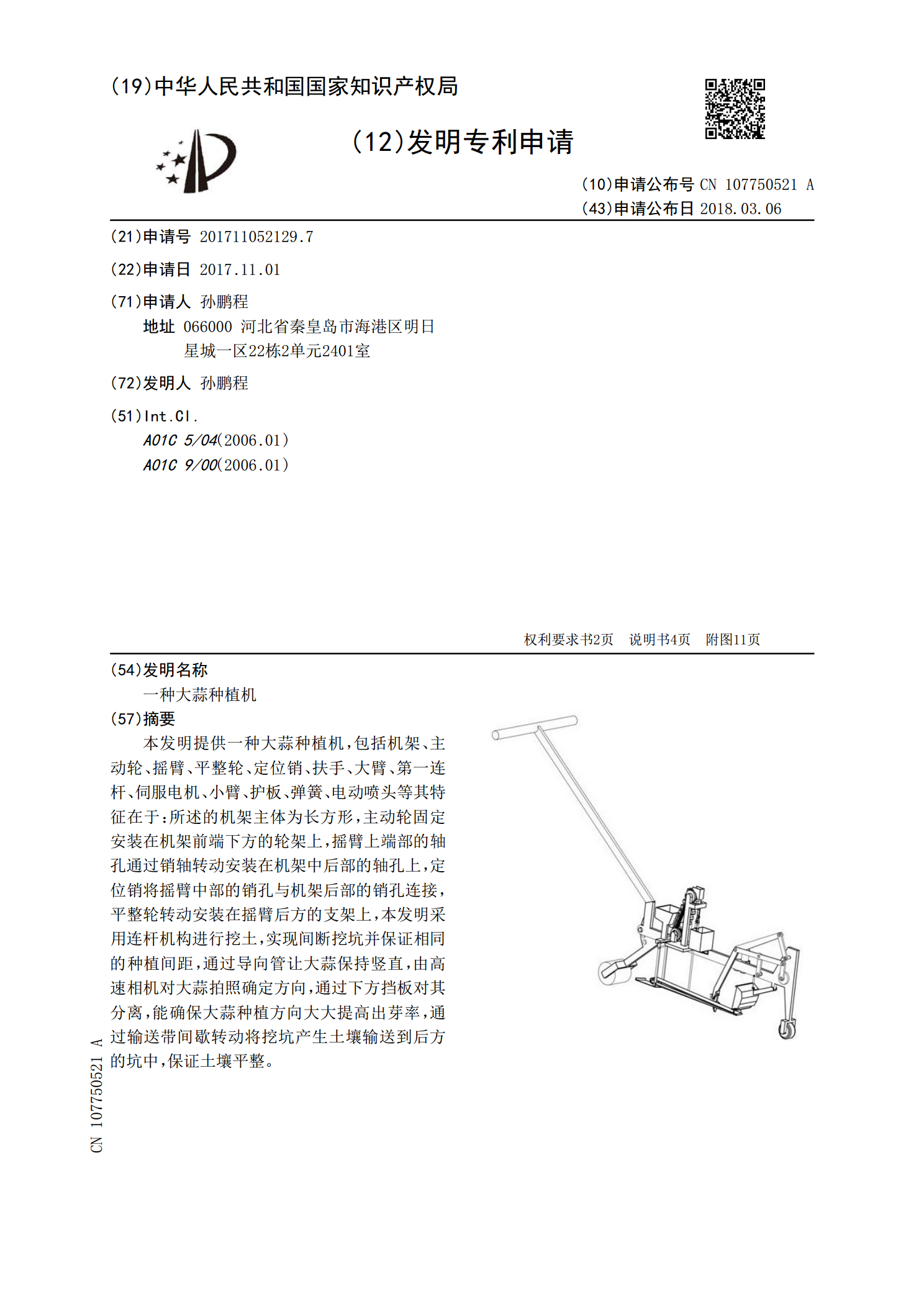
本发明提供一种大蒜种植机,包括机架、主动轮、摇臂、平整轮、定位销、扶手、大臂、第一连杆、伺服电机、小臂、护板、弹簧、电动喷头等其特征在于:所述的机架主体为长方形,主动轮固定安装在机架前端下方的轮架上,摇臂上端部的轴孔通过销轴转动安装在机架中后部的轴孔上,定位销将摇臂中部的销孔与机架后部的销孔连接,平整轮转动安装在摇臂后方的支架上,本发明采用连杆机构进行挖土,实现间断挖坑并保证相同的种植间距,通过导向管让大蒜保持竖直,由高速相机对大蒜拍照确定方向,通过下方挡板对其分离,能确保大蒜种植方向大大提高出芽率,通过

一种仿生大蒜种植机.pdf
本发明涉及一种种植机,尤其是涉及一种仿生大蒜种植机。包括机架、扶手、装蒜斗、前支撑板、动力装置、装蒜机构、犁地装置和转向机构;液压油缸的一端与油缸固定座连接,另一端与地面支脚连接,液压油缸在液压油的驱动下伸长时,带动地面支脚伸向地面,并将大蒜种植机整体抬起,使得开沟器、碾轮以及犁头脱离地面,升到空中,推动扶手即可实现原地转向。