
立式弹力纱线整经机纱架同步控制系统及纱架同步控制方法.pdf

念珊****写意


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

立式弹力纱线整经机纱架同步控制系统及纱架同步控制方法.pdf
一种立式弹力纱线整经机纱架同步控制系统和方法,包括可编程控制器、第一、二伺服电机、第一、二伺服控制器、第一、二编码器,可编程控制器与第一伺服控制器之间通过总线进行通信,可编程控制器与第二伺服控制器之间通过总线进行通信,第一伺服控制器的信号输出口与第二伺服控制器的信号输入口通过总线相连,伺服电机内置有旋转变压器,第一、二编码器分别检测第一、二纱架的纱架罗拉的转数,第一、二编码器的输出端均与可编程控制器相连,第一、二伺服控制器均为内置电子齿轮电路及相位补偿电路的伺服控制器。本发明能实现第一、第二纱架同步运行,

防止纱线打滑的储纱架.pdf
本发明涉及一种防止纱线打滑的储纱架,其特征在于它包括架体(1)、上压辊(2)、下压辊(3)、减速电机(7)、离合器(6)、气缸(4)和传动齿轮(5),所述上压辊的两端分别插置于轴承座(8)内,所述轴承座与架体上下滑动连接,且下压辊的两端分别固定于架体上,在所述上压辊的一端套置有传动齿轮,所述传动齿轮与离合器相啮合,所述离合器与减速电机的输出端相连。本发明通过离合器来设定纱线的张力大小,从而实现纱线的运行速度和压辊的滚动线速度相同,防止纱线与压辊之间产生摩擦,影响纱线的质量。

整经机新型ZV纱架电柜检测装置.pdf
本发明涉及整经机技术领域,尤其是一种整经机新型ZV纱架电柜检测装置,接线端子排的端口一、端口二、端口三依次连接接触器二的主触点,端口十七、端口十八、端口十九和电动机,接触器二的主触点上并联有接触器一的主触点,端口五后端依次连接接触器一的线圈、端口十三、限位开关一、端口八、接触器二常闭触点、端口十二、端口十一、接触器一的常开触点和端口十,接触器一的线圈后端依次连接限位开关二、端口七、接触器一的常闭触点、端口十五、端口十四、接触器二的常开触点和接触器一的常开触点。本装置体积小巧,操作简单,检测装置带有接线段子
筒子纱蒸纱工装架.pdf
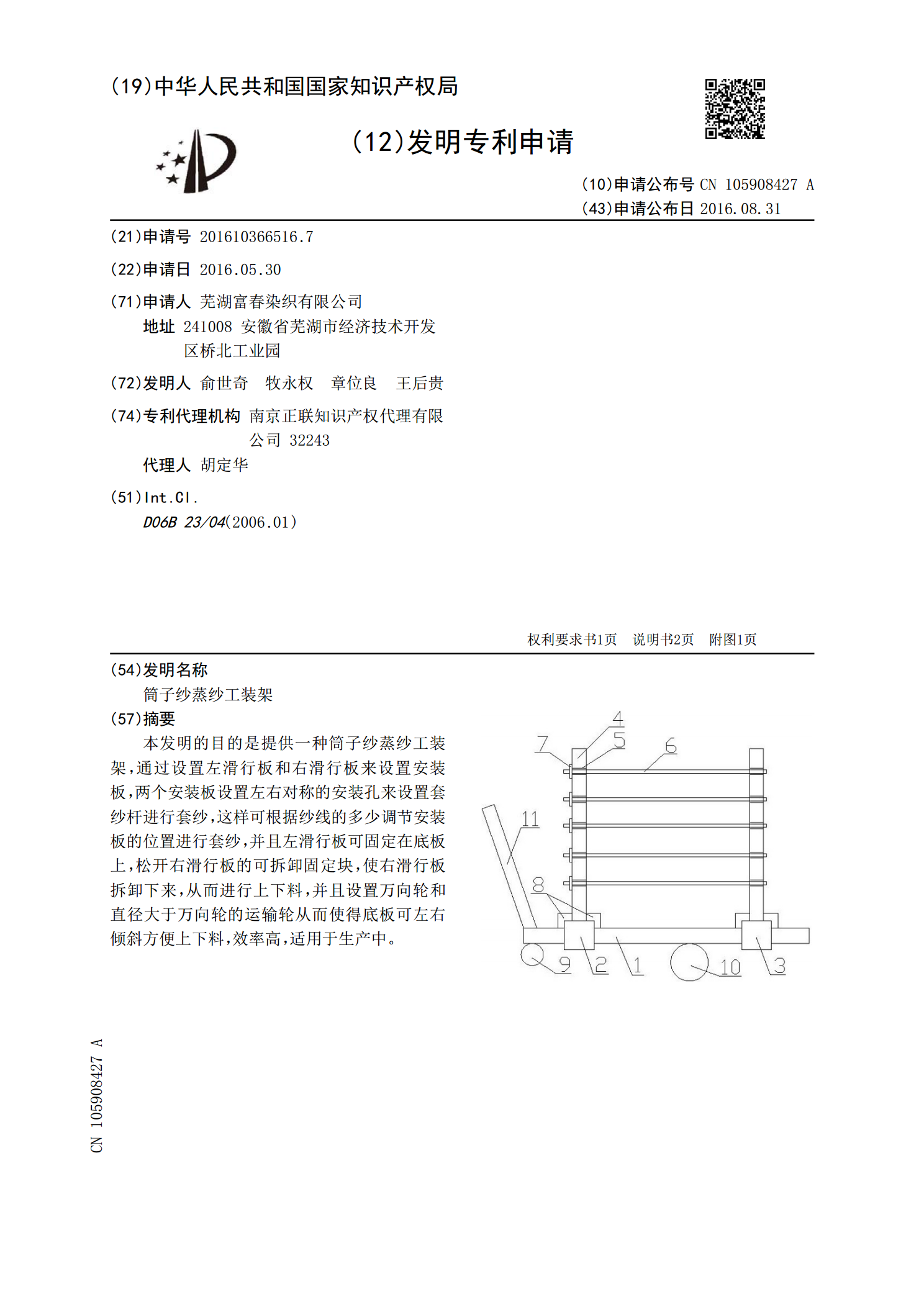
本发明的目的是提供一种筒子纱蒸纱工装架,通过设置左滑行板和右滑行板来设置安装板,两个安装板设置左右对称的安装孔来设置套纱杆进行套纱,这样可根据纱线的多少调节安装板的位置进行套纱,并且左滑行板可固定在底板上,松开右滑行板的可拆卸固定块,使右滑行板拆卸下来,从而进行上下料,并且设置万向轮和直径大于万向轮的运输轮从而使得底板可左右倾斜方便上下料,效率高,适用于生产中。
经编机纱架.pdf
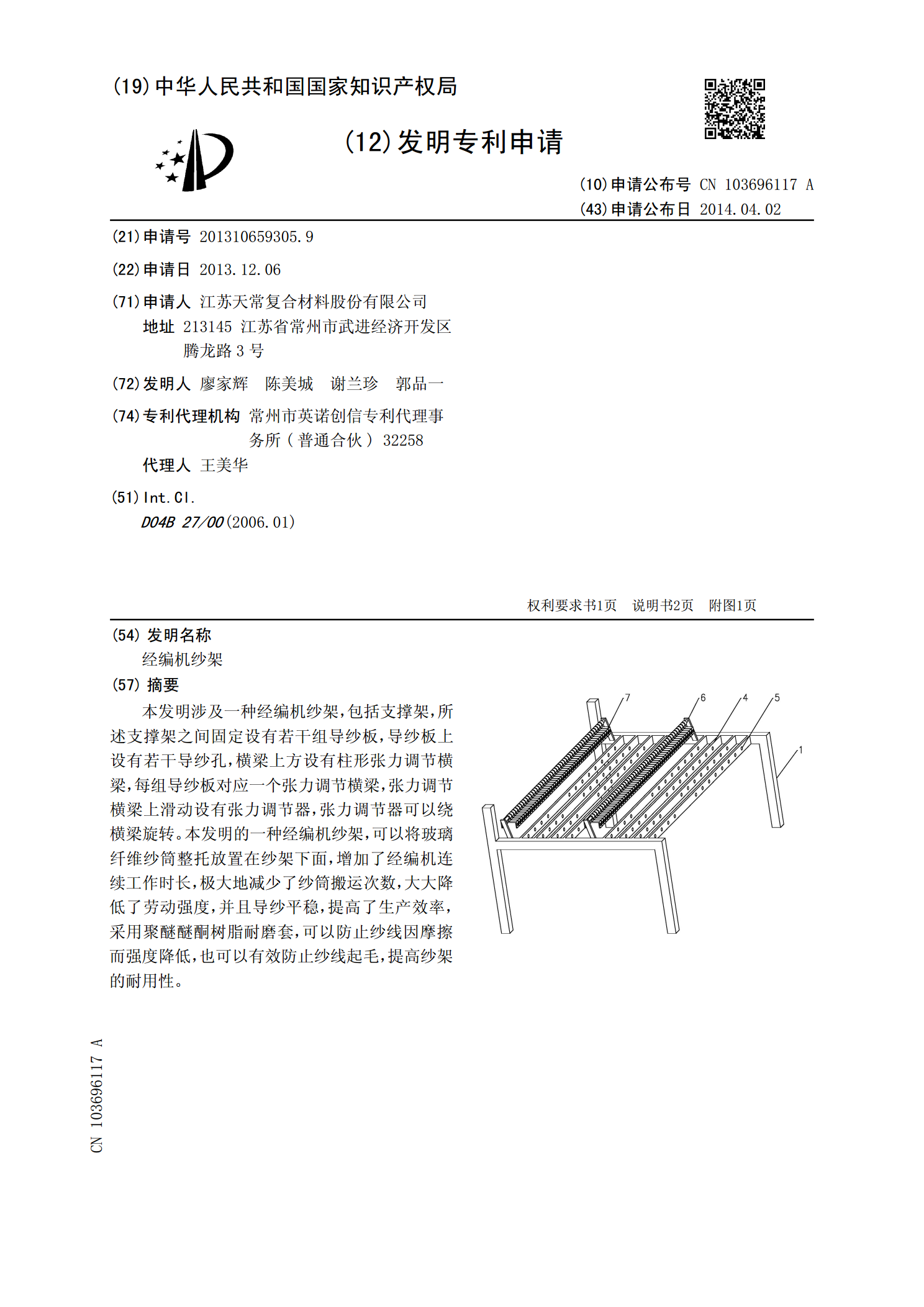
本发明涉及一种经编机纱架,包括支撑架,所述支撑架之间固定设有若干组导纱板,导纱板上设有若干导纱孔,横梁上方设有柱形张力调节横梁,每组导纱板对应一个张力调节横梁,张力调节横梁上滑动设有张力调节器,张力调节器可以绕横梁旋转。本发明的一种经编机纱架,可以将玻璃纤维纱筒整托放置在纱架下面,增加了经编机连续工作时长,极大地减少了纱筒搬运次数,大大降低了劳动强度,并且导纱平稳,提高了生产效率,采用聚醚醚酮树脂耐磨套,可以防止纱线因摩擦而强度降低,也可以有效防止纱线起毛,提高纱架的耐用性。