
一种穴盘苗移栽机取苗机构.pdf

一吃****仕龙


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种穴盘苗移栽机取苗机构.pdf
?本发明公开了一种穴盘苗移栽机取苗机构,涉及旱地移栽机械领域,包括行星架(1)、中心轮(2)、行星轮A(3)、行星轮B(4)、取苗爪(6)、连杆A(7)、滚子(8)、槽型凸轮(9)、连杆B(10)。本发明运动精度高,易于控制,能适应田间移栽环境复杂的要求;整体结构简单,工作可靠,使用方便,造价低廉,可靠性高。
一种穴盘苗自动移栽机取苗机构.pdf
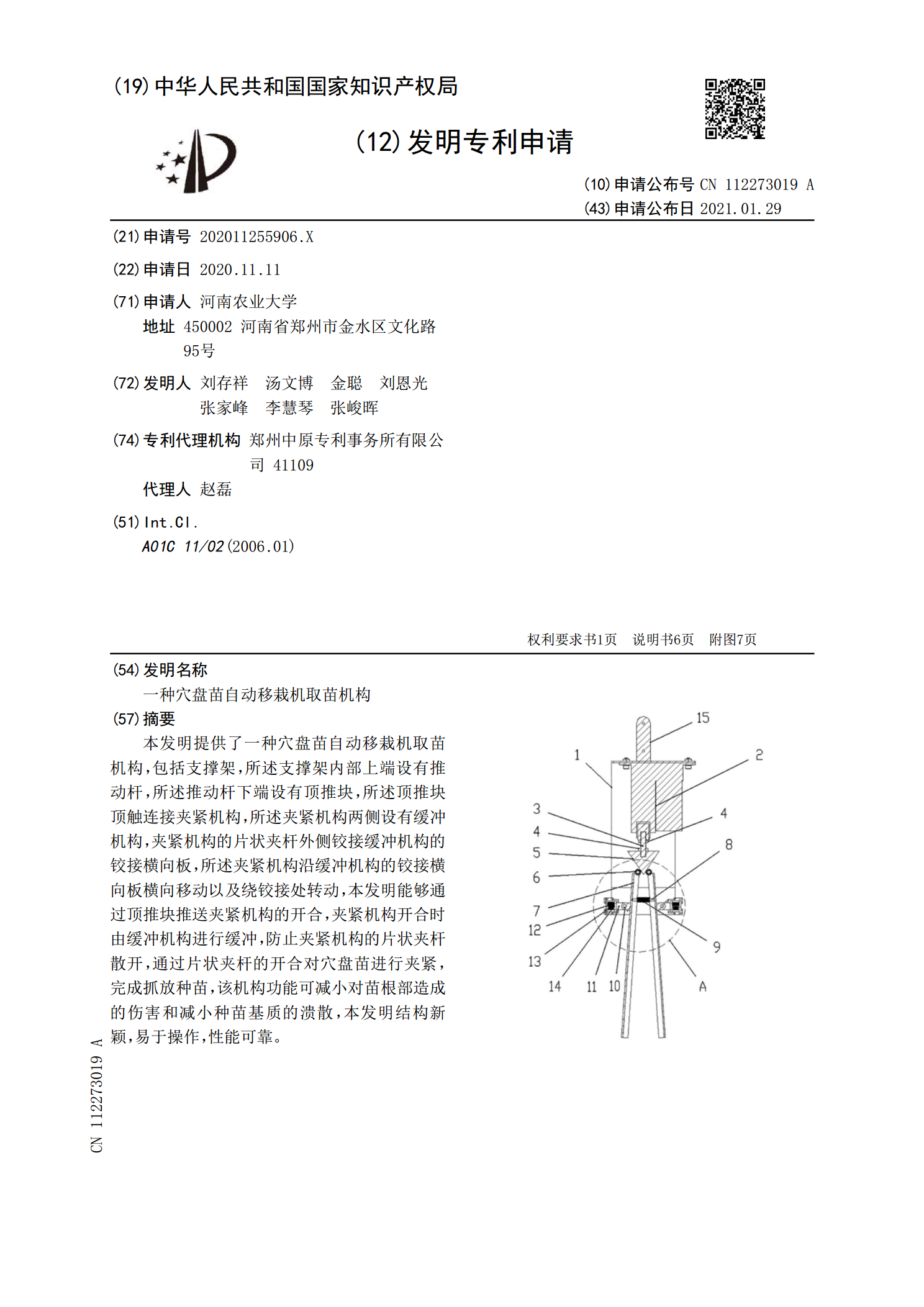
本发明提供了一种穴盘苗自动移栽机取苗机构,包括支撑架,所述支撑架内部上端设有推动杆,所述推动杆下端设有顶推块,所述顶推块顶触连接夹紧机构,所述夹紧机构两侧设有缓冲机构,夹紧机构的片状夹杆外侧铰接缓冲机构的铰接横向板,所述夹紧机构沿缓冲机构的铰接横向板横向移动以及绕铰接处转动,本发明能够通过顶推块推送夹紧机构的开合,夹紧机构开合时由缓冲机构进行缓冲,防止夹紧机构的片状夹杆散开,通过片状夹杆的开合对穴盘苗进行夹紧,完成抓放种苗,该机构功能可减小对苗根部造成的伤害和减小种苗基质的溃散,本发明结构新颖,易于操作,
一种移栽机穴盘苗定位取苗装置.pdf
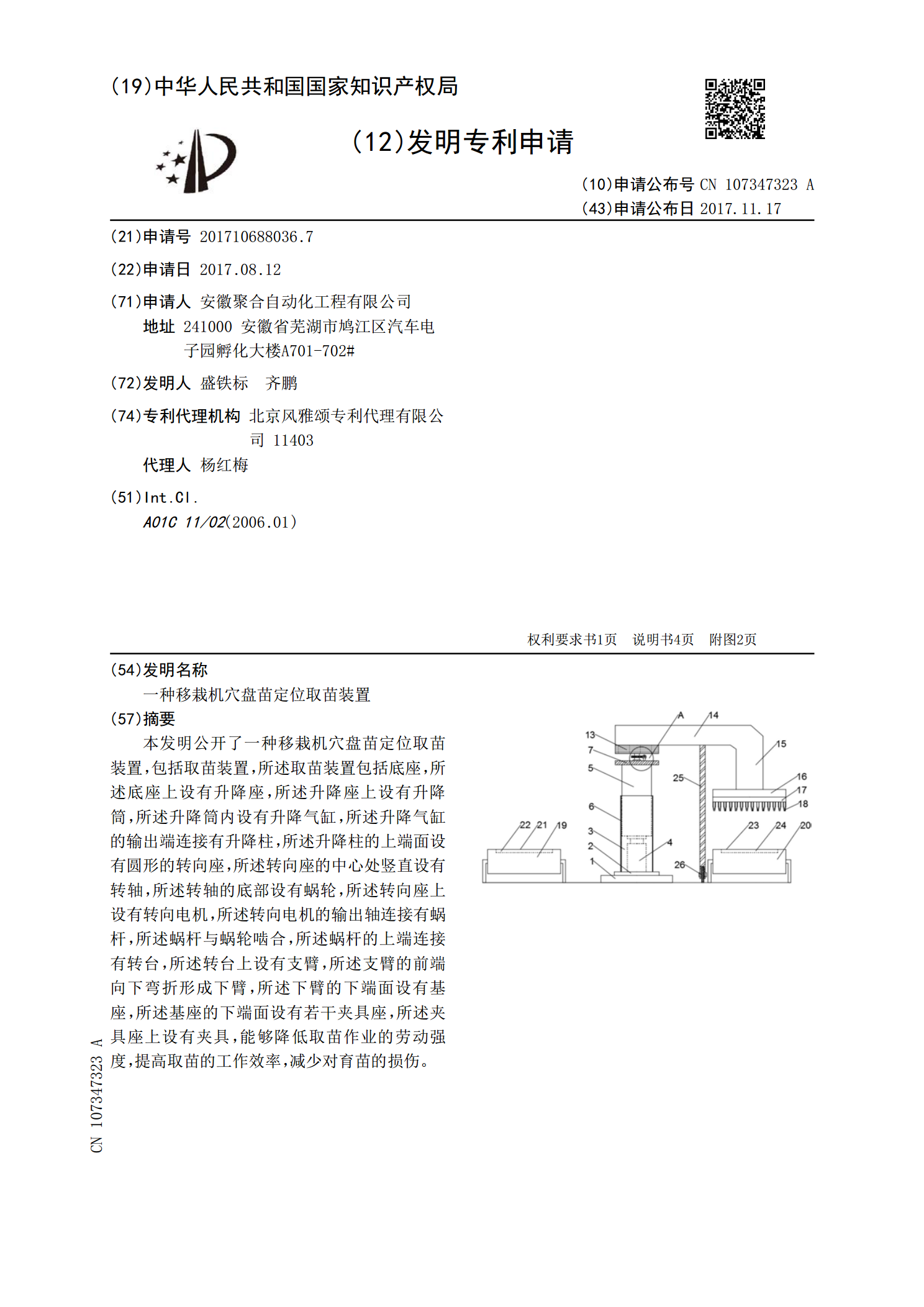
本发明公开了一种移栽机穴盘苗定位取苗装置,包括取苗装置,所述取苗装置包括底座,所述底座上设有升降座,所述升降座上设有升降筒,所述升降筒内设有升降气缸,所述升降气缸的输出端连接有升降柱,所述升降柱的上端面设有圆形的转向座,所述转向座的中心处竖直设有转轴,所述转轴的底部设有蜗轮,所述转向座上设有转向电机,所述转向电机的输出轴连接有蜗杆,所述蜗杆与蜗轮啮合,所述蜗杆的上端连接有转台,所述转台上设有支臂,所述支臂的前端向下弯折形成下臂,所述下臂的下端面设有基座,所述基座的下端面设有若干夹具座,所述夹具座上设有夹具

穴盘苗移栽机新型取苗机构的设计与参数优化的开题报告.docx
穴盘苗移栽机新型取苗机构的设计与参数优化的开题报告开题报告题目:穴盘苗移栽机新型取苗机构的设计与参数优化一、选题背景和意义随着农业机械化水平的不断提高,现代农业生产对于机械化设备的需求越来越大。其中,穴盘苗移栽机是一种常见的农业机械,可以用于将苗盘中的苗移栽到田间地头,提高工作效率,缩短工作时间。目前,市场上存在一些穴盘苗移栽机,但它们的取苗机构存在着一些不足之处,例如抓取力度不够、稳定性差、易损坏等问题,需要进行进一步的改进。因此,本文选取了穴盘苗移栽机的取苗机构进行研究,旨在设计一种新型的取苗机构,使

穴盘苗移栽机取苗部件的设计及试验研究.docx
穴盘苗移栽机取苗部件的设计及试验研究摘要:本文主要介绍了一种穴盘苗移栽机取苗部件的设计及试验研究。该设备能够准确地取苗,避免了穴盘苗的损坏,提高了移栽的成功率。同时,该设备的操作简单,使用方便,并且具有较高的经济效益。关键词:穴盘苗移栽机,取苗部件,设计,试验研究引言:随着农业的发展和科技的进步,越来越多的农民开始选择穴盘苗进行栽种。然而,穴盘苗的取苗过程非常困难,容易造成苗期延迟和苗根伤害等问题。因此,为了提高穴盘苗的移栽效率和质量,本文对穴盘苗移栽机的取苗部件进行了设计和试验研究。1设计方案1.1设计