
一种汽车方向盘转动角度测量方法.pdf

绮兰****文章


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种汽车方向盘转动角度测量方法.pdf
本发明公开了一种汽车方向盘转动角度的测量方法,通过第一GMR传感器获得小齿轮旋转的角度α,通过第二GMR传感器获得大齿轮旋转的角度β;再有微处理器根据α,β,和大小齿轮转角关系图算出大齿轮转动的圈数P,最后有转动的圈数P和大齿轮旋转的角度β算出主齿轮旋转的角度θ。这种汽车方向盘的角度测量方法能够实现正反向自动判断,实现了在多圈内精确测量主齿轮转动的绝对转角θ。对温度、振动、安装定位误差、空程等环境参量的改变具有良好的容差特性。

一种方向盘转动角度的测量方法和装置.pdf
本发明提供一种方向盘转动角度的测量方法,包括以下步骤:步骤1:分别获得第一从动齿轮的旋转角度α和第二从动齿轮的旋转角度β;步骤2:第一从动齿轮的旋转角度α和同时得到的第二从动齿轮的旋转角度β相减,得到差值ω;步骤3:对差值ω进行修正;步骤4:由修正后的差值ω、主动齿轮、第二从动齿轮和第一从动齿轮的齿轮齿数L、M和N,计算出主动齿轮旋转的绝对角度θ,绝对角度θ即为方向盘的旋转角度。本发明还提供一种相应的方向盘转动角度的测量装置。本发明的测量方法和装置能够实现多圈内精确测量方向盘旋转的绝对角度θ。
一种汽车方向盘转动角度指示器.pdf
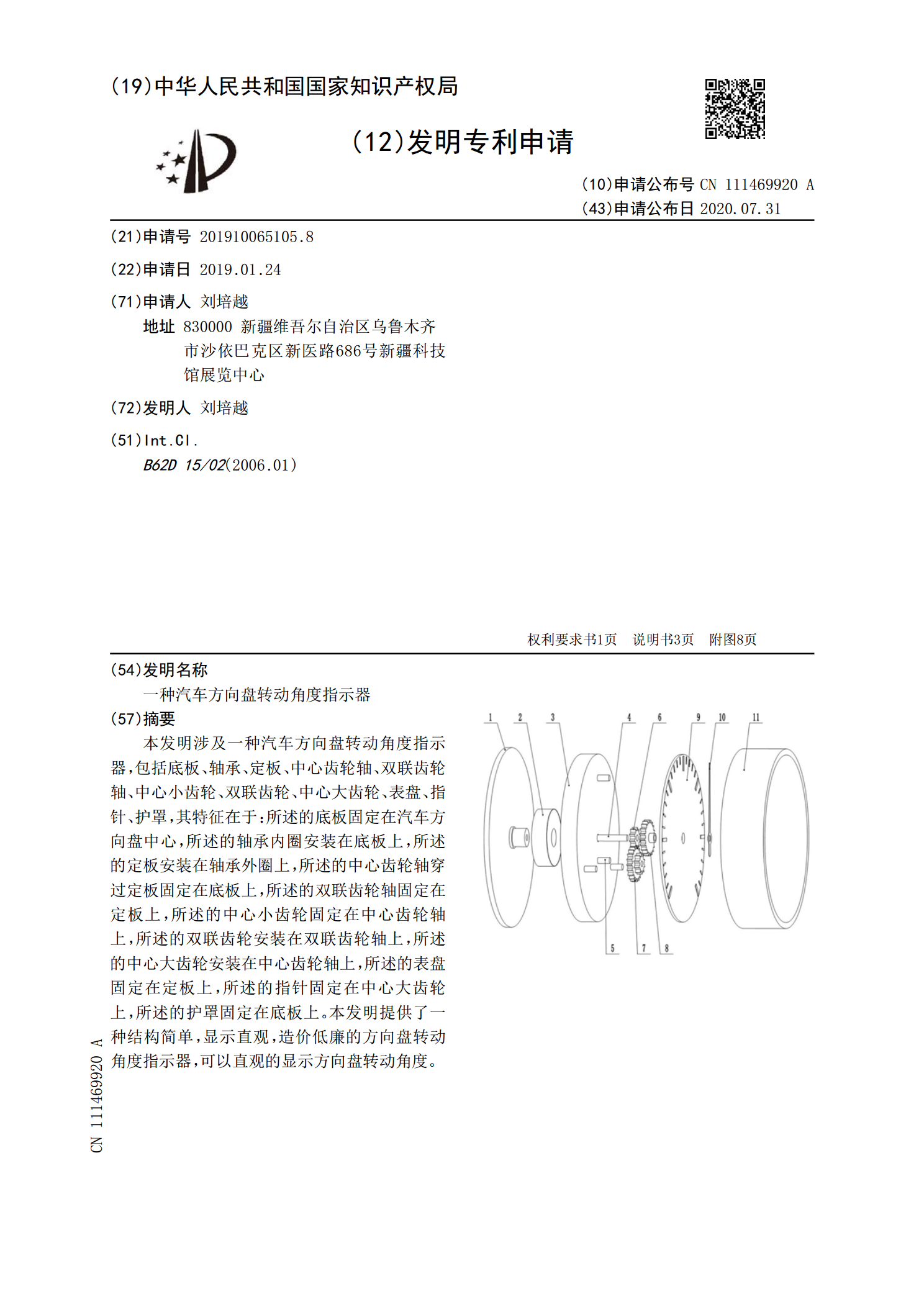
本发明涉及一种汽车方向盘转动角度指示器,包括底板、轴承、定板、中心齿轮轴、双联齿轮轴、中心小齿轮、双联齿轮、中心大齿轮、表盘、指针、护罩,其特征在于:所述的底板固定在汽车方向盘中心,所述的轴承内圈安装在底板上,所述的定板安装在轴承外圈上,所述的中心齿轮轴穿过定板固定在底板上,所述的双联齿轮轴固定在定板上,所述的中心小齿轮固定在中心齿轮轴上,所述的双联齿轮安装在双联齿轮轴上,所述的中心大齿轮安装在中心齿轮轴上,所述的表盘固定在定板上,所述的指针固定在中心大齿轮上,所述的护罩固定在底板上。本发明提供了一种结构

汽车方向盘转动角度指示器.pdf
本发明公开了一种汽车方向盘转动角度指示器,包括方向盘、变速装置、角度检测传感器、电器控制板和液晶显示屏,其特点是,方向盘底座部同轴的安装的齿轮和减速装置上装有的传动齿轮相啮合,所述的角度检测传感器装在减速装置末级齿轮输出轴上,通过角度检测传感器检测出汽车转弯时转动方向盘的转动角度,并转换成电信号给电器控制板,液晶屏显示屏上指示出驾驶员方向盘转动的角度即提示了前轮扭转方向。本发明都是在现成的车辆上加装,当驾驶员熟悉自己座驾方向盘性能后或者不想再使用时可以方便快捷地拆卸。设计的这种汽车方向盘转度提示器,不仅能

汽车方向盘转动指示装置.pdf
本发明提供了一种汽车方向盘转动指示装置,属于汽车转向系统领域;通过在方向盘下的转向轴上安装有组合齿轮,当方向盘转动时带动组合齿轮一起转动,而组合齿轮的转动带动齿条在导槽内的左右移动,通过齿条的左右移动来控制安装在支架上的左指示灯开关和右指示灯开关的闭合,即显示方向盘的转向,通过齿条左右移动的长度即指示灯间距来控制左指示灯和右指示灯亮的个数,即指示方向盘转动的角度范围;本发明不仅能够显示汽车方向盘的转向,又能显示方向盘转动的角度,能够有效地帮助驾驶员随时掌握盘的位置,较少操作失误,减小车轮的磨损,特别适用于