
平衡轴斜齿轮自动热压装配装置.pdf

是笛****加盟


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

平衡轴斜齿轮自动热压装配装置.pdf
一种平衡轴斜齿轮自动热压装配装置,包括动平衡机(2)、齿轮热压机(3)、机械手(4)和上下料站(5),所述机械手(4)夹取上下料站(5)上待装配的平衡轴和斜齿轮,分别送至动平衡机(2)和齿轮热压机(3),该动平衡机(2)对所述平衡轴进行动不平衡量测量,并对平衡轴进行方向找正,斜齿轮在齿轮热压机(3)中被加热,经动不平衡测量和方向找正后的平衡轴由所述机械手(4)送至斜齿轮热压机(3)中,与已加热的斜齿轮进行热压装配。本装置具有足够的静态、动态、热稳态刚度和精度,整个系统具有良好的动态性能,所选择的检测测量和
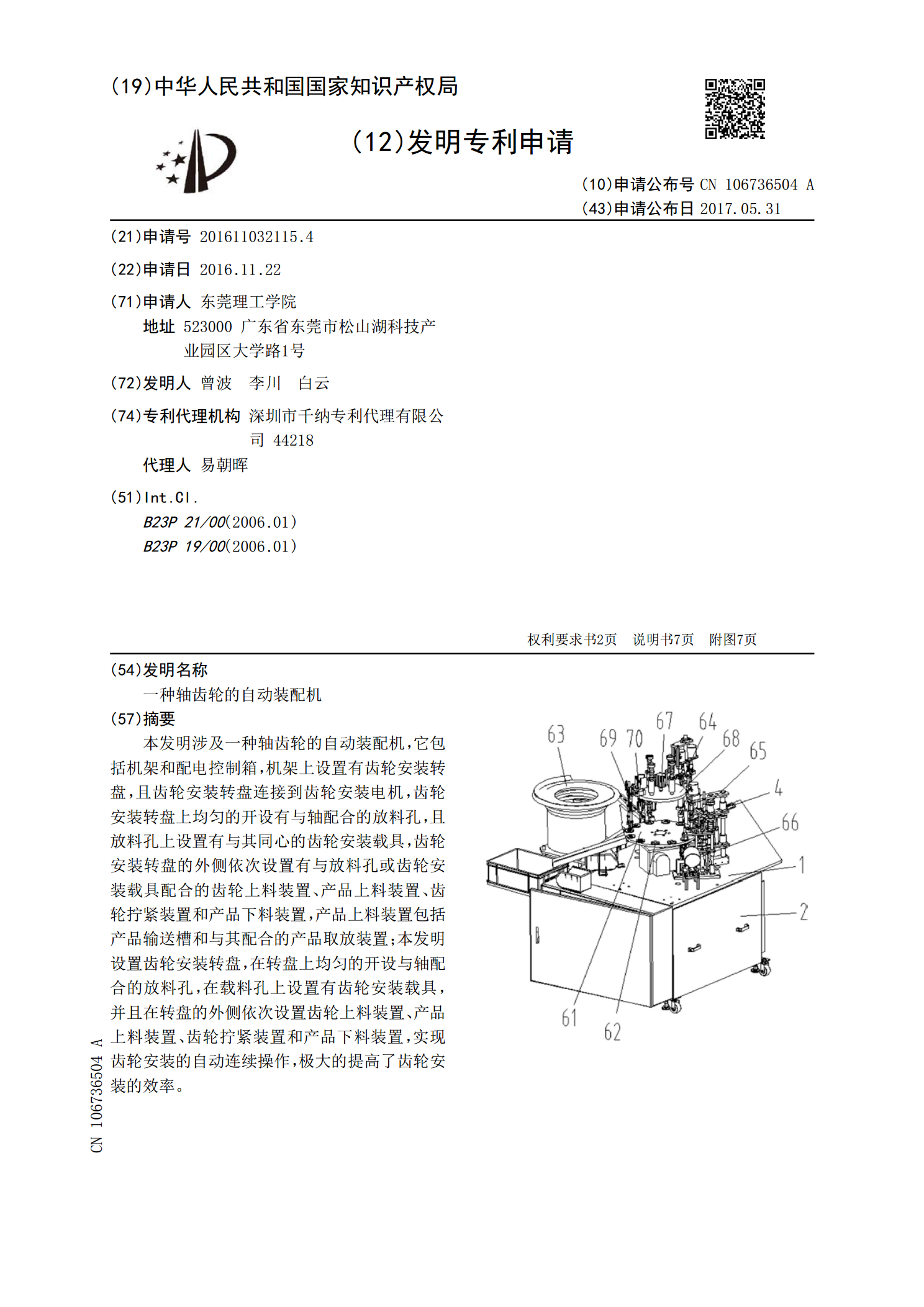
一种轴齿轮的自动装配机.pdf
本发明涉及一种轴齿轮的自动装配机,它包括机架和配电控制箱,机架上设置有齿轮安装转盘,且齿轮安装转盘连接到齿轮安装电机,齿轮安装转盘上均匀的开设有与轴配合的放料孔,且放料孔上设置有与其同心的齿轮安装载具,齿轮安装转盘的外侧依次设置有与放料孔或齿轮安装载具配合的齿轮上料装置、产品上料装置、齿轮拧紧装置和产品下料装置,产品上料装置包括产品输送槽和与其配合的产品取放装置;本发明设置齿轮安装转盘,在转盘上均匀的开设与轴配合的放料孔,在载料孔上设置有齿轮安装载具,并且在转盘的外侧依次设置齿轮上料装置、产品上料装置、齿
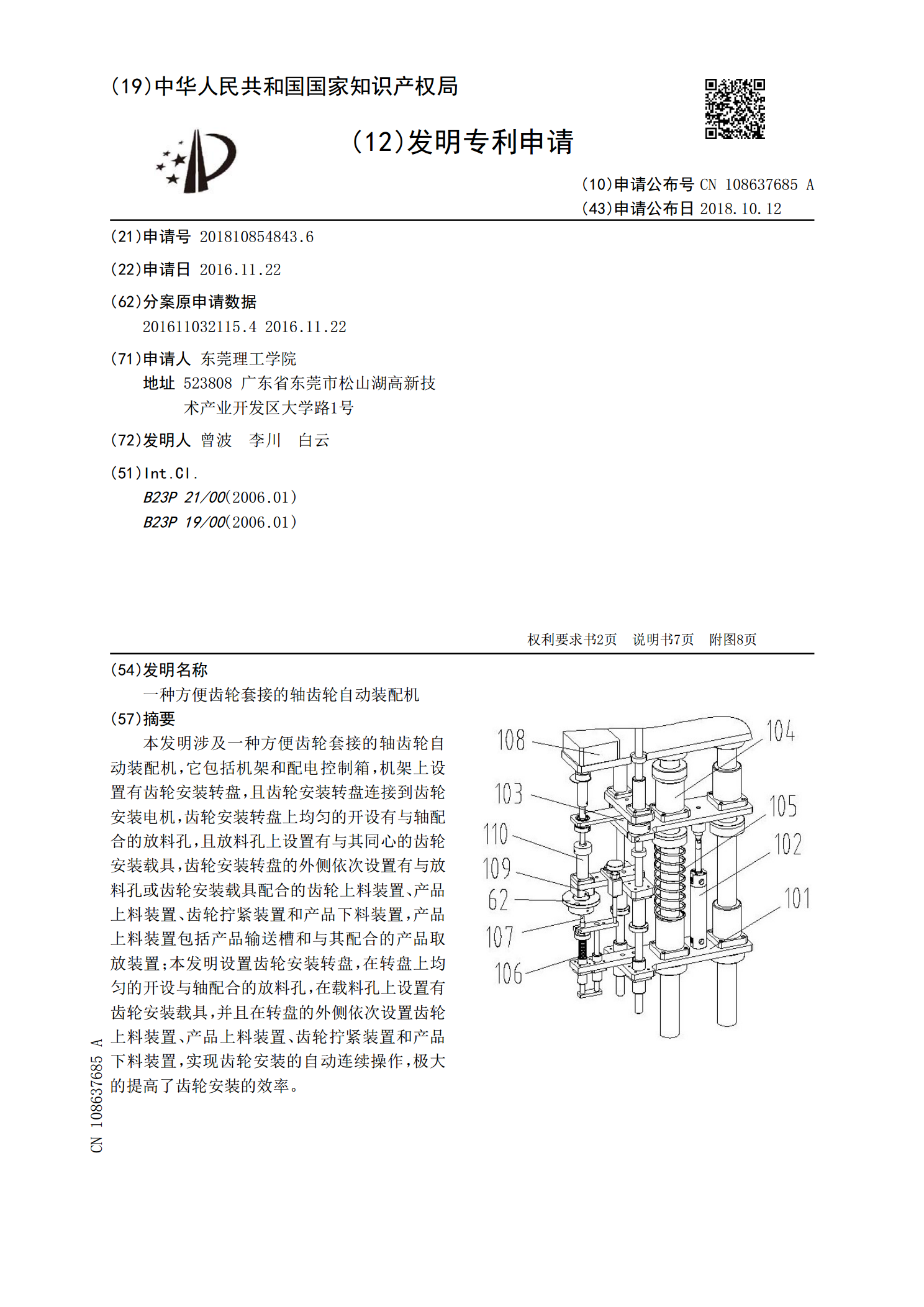
一种方便齿轮套接的轴齿轮自动装配机.pdf
本发明涉及一种方便齿轮套接的轴齿轮自动装配机,它包括机架和配电控制箱,机架上设置有齿轮安装转盘,且齿轮安装转盘连接到齿轮安装电机,齿轮安装转盘上均匀的开设有与轴配合的放料孔,且放料孔上设置有与其同心的齿轮安装载具,齿轮安装转盘的外侧依次设置有与放料孔或齿轮安装载具配合的齿轮上料装置、产品上料装置、齿轮拧紧装置和产品下料装置,产品上料装置包括产品输送槽和与其配合的产品取放装置;本发明设置齿轮安装转盘,在转盘上均匀的开设与轴配合的放料孔,在载料孔上设置有齿轮安装载具,并且在转盘的外侧依次设置齿轮上料装置、产品

汽车平衡轴自动化装配设备.pdf
本发明涉及一种汽车平衡轴自动化装配设备,包括:机台,所述机台上转动连接有载料盘;至少三组设置在载料盘上的装夹机构;用于与其中一组装夹机构相对应以拧紧铆合螺钉的锁合机构,所述锁合机构包括:承载于机台的安装座、承载于所述安装座用于夹持所述铆合螺钉以使所述铆合螺钉保持竖直状态的扶正组件、以及承载于所述安装座且位于所述装夹机构的正上方用于施力于所述铆合螺钉以将所述铆合螺钉锁紧的拧合组件;以及,承载于所述机台、用于在组装完成的平衡轴的偏转轮上进行打标处理的刻印机构。本发明的锁紧效率更高,同时通过锁合机构进行自动化锁
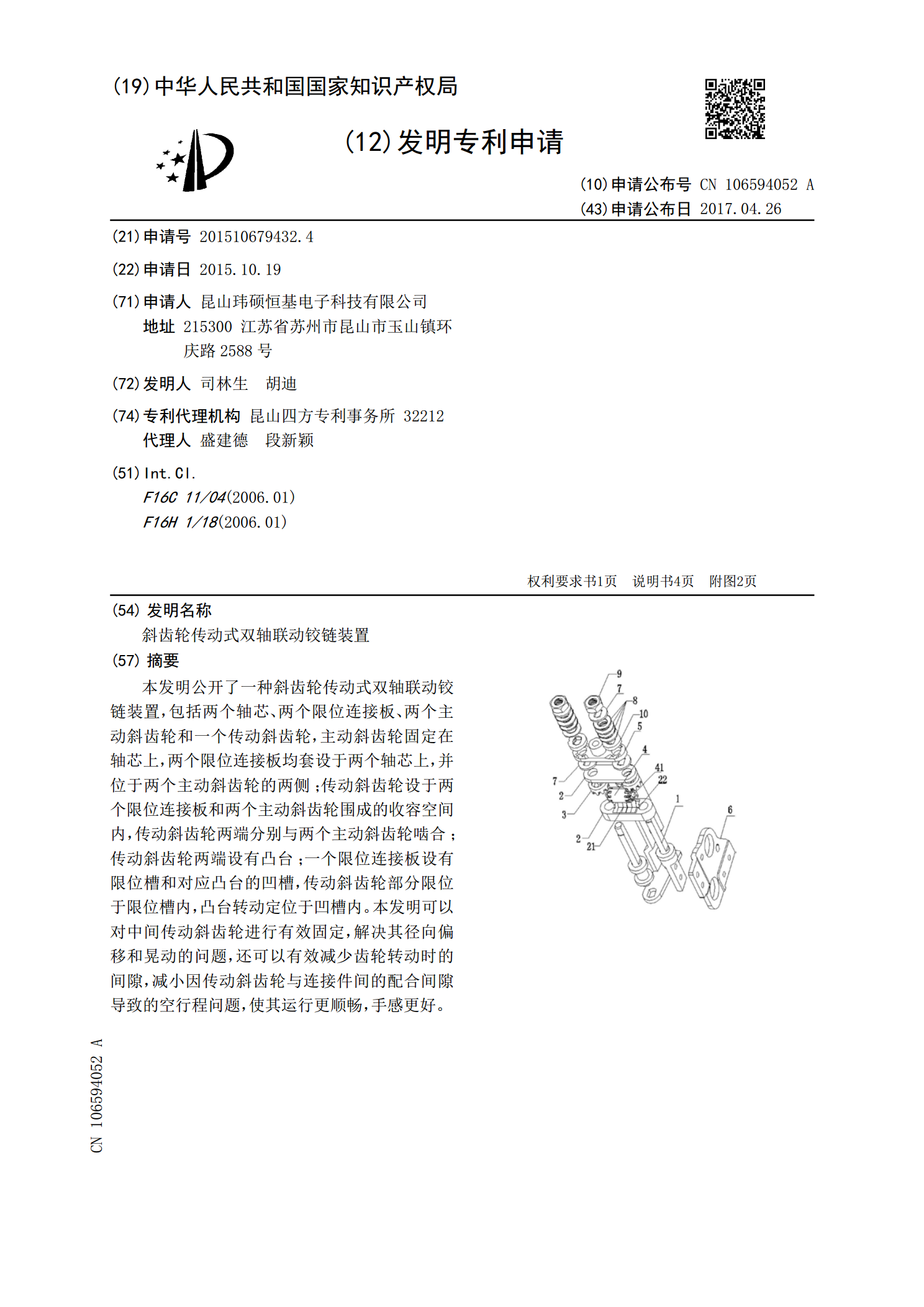
斜齿轮传动式双轴联动铰链装置.pdf
本发明公开了一种斜齿轮传动式双轴联动铰链装置,包括两个轴芯、两个限位连接板、两个主动斜齿轮和一个传动斜齿轮,主动斜齿轮固定在轴芯上,两个限位连接板均套设于两个轴芯上,并位于两个主动斜齿轮的两侧;传动斜齿轮设于两个限位连接板和两个主动斜齿轮围成的收容空间内,传动斜齿轮两端分别与两个主动斜齿轮啮合;传动斜齿轮两端设有凸台;一个限位连接板设有限位槽和对应凸台的凹槽,传动斜齿轮部分限位于限位槽内,凸台转动定位于凹槽内。本发明可以对中间传动斜齿轮进行有效固定,解决其径向偏移和晃动的问题,还可以有效减少齿轮转动时的间