
一种双臂四轮式巡检机器人机构.pdf

波峻****99


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种双臂四轮式巡检机器人机构.pdf
本发明涉及一种移动机器人,具体地说是一种双臂四轮式巡检机器人机构,包括箱体及结构相同的前、后手臂机构,前、后手臂机构分别安装在箱体上,每个手臂机构上均包括行走机构、翻转机构、俯仰机构、夹紧机构及支撑臂,支撑臂的一端与箱体相连,另一端铰接有俯仰机构,俯仰机构的两端分别设有前、后翻转机构,可由水平状态翻转至垂直状态的前、后行走机构分别连接于前、后翻转机构的输出端,前、后行走机构及前、后翻转机构与俯仰机构连动;在前、后行走机构的正下方设有安装在支撑臂上、可上下移动夹紧地线的夹紧机构。本发明机器人机构具有安全保护
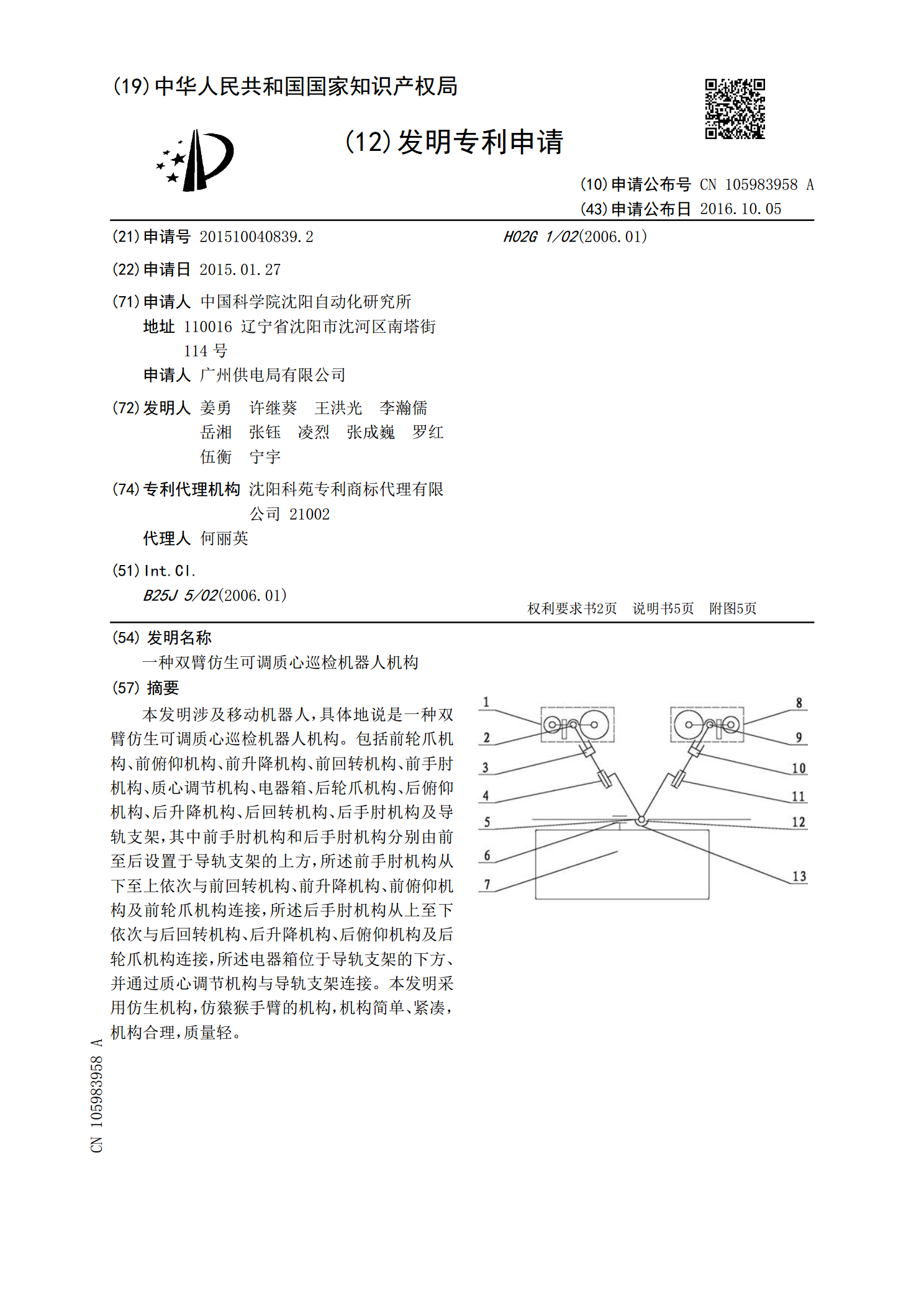
一种双臂仿生可调质心巡检机器人机构.pdf
本发明涉及移动机器人,具体地说是一种双臂仿生可调质心巡检机器人机构。包括前轮爪机构、前俯仰机构、前升降机构、前回转机构、前手肘机构、质心调节机构、电器箱、后轮爪机构、后俯仰机构、后升降机构、后回转机构、后手肘机构及导轨支架,其中前手肘机构和后手肘机构分别由前至后设置于导轨支架的上方,所述前手肘机构从下至上依次与前回转机构、前升降机构、前俯仰机构及前轮爪机构连接,所述后手肘机构从上至下依次与后回转机构、后升降机构、后俯仰机构及后轮爪机构连接,所述电器箱位于导轨支架的下方、并通过质心调节机构与导轨支架连接。本
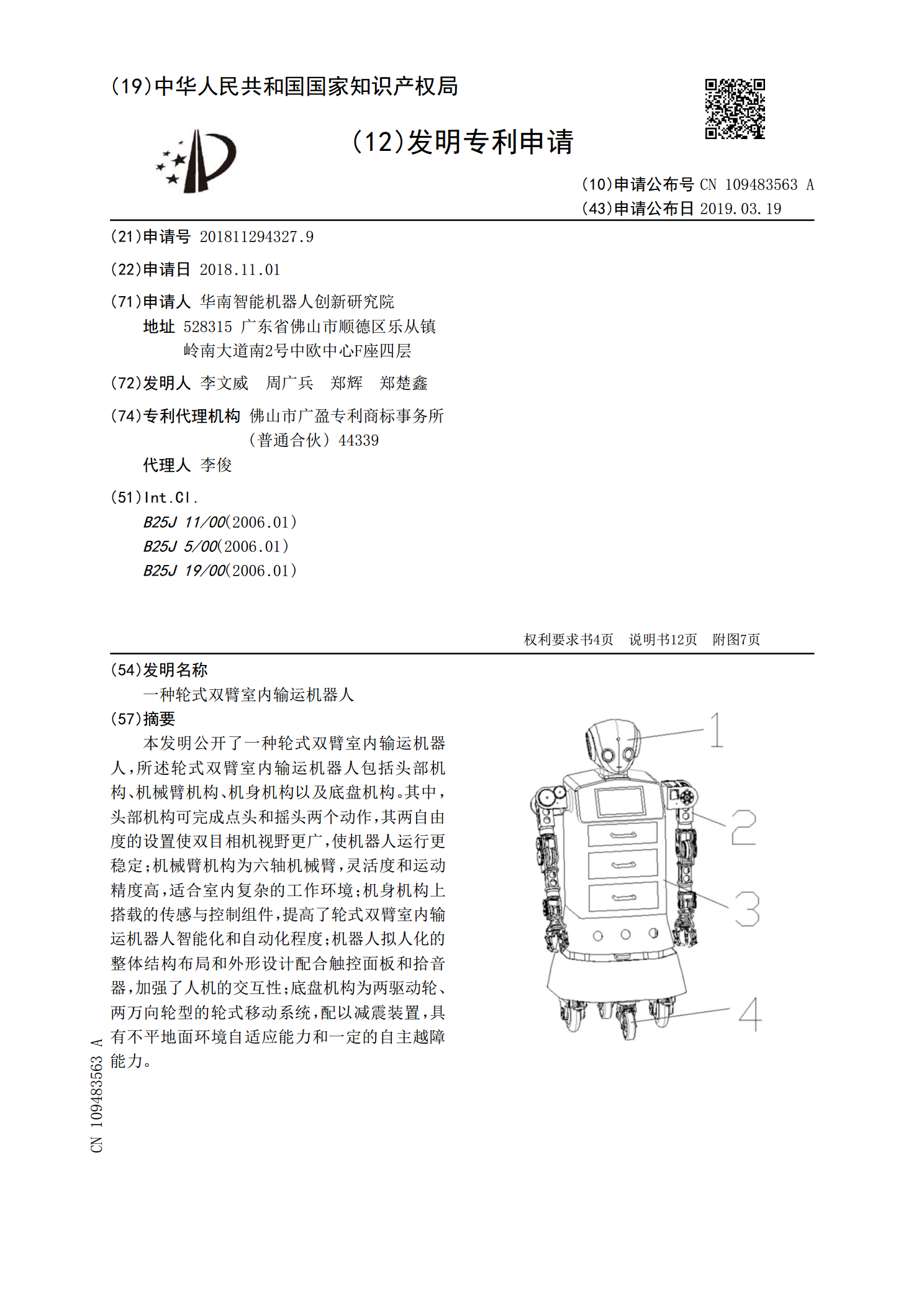
一种轮式双臂室内输运机器人.pdf
本发明公开了一种轮式双臂室内输运机器人,所述轮式双臂室内输运机器人包括头部机构、机械臂机构、机身机构以及底盘机构。其中,头部机构可完成点头和摇头两个动作,其两自由度的设置使双目相机视野更广,使机器人运行更稳定;机械臂机构为六轴机械臂,灵活度和运动精度高,适合室内复杂的工作环境;机身机构上搭载的传感与控制组件,提高了轮式双臂室内输运机器人智能化和自动化程度;机器人拟人化的整体结构布局和外形设计配合触控面板和拾音器,加强了人机的交互性;底盘机构为两驱动轮、两万向轮型的轮式移动系统,配以减震装置,具有不平地面环
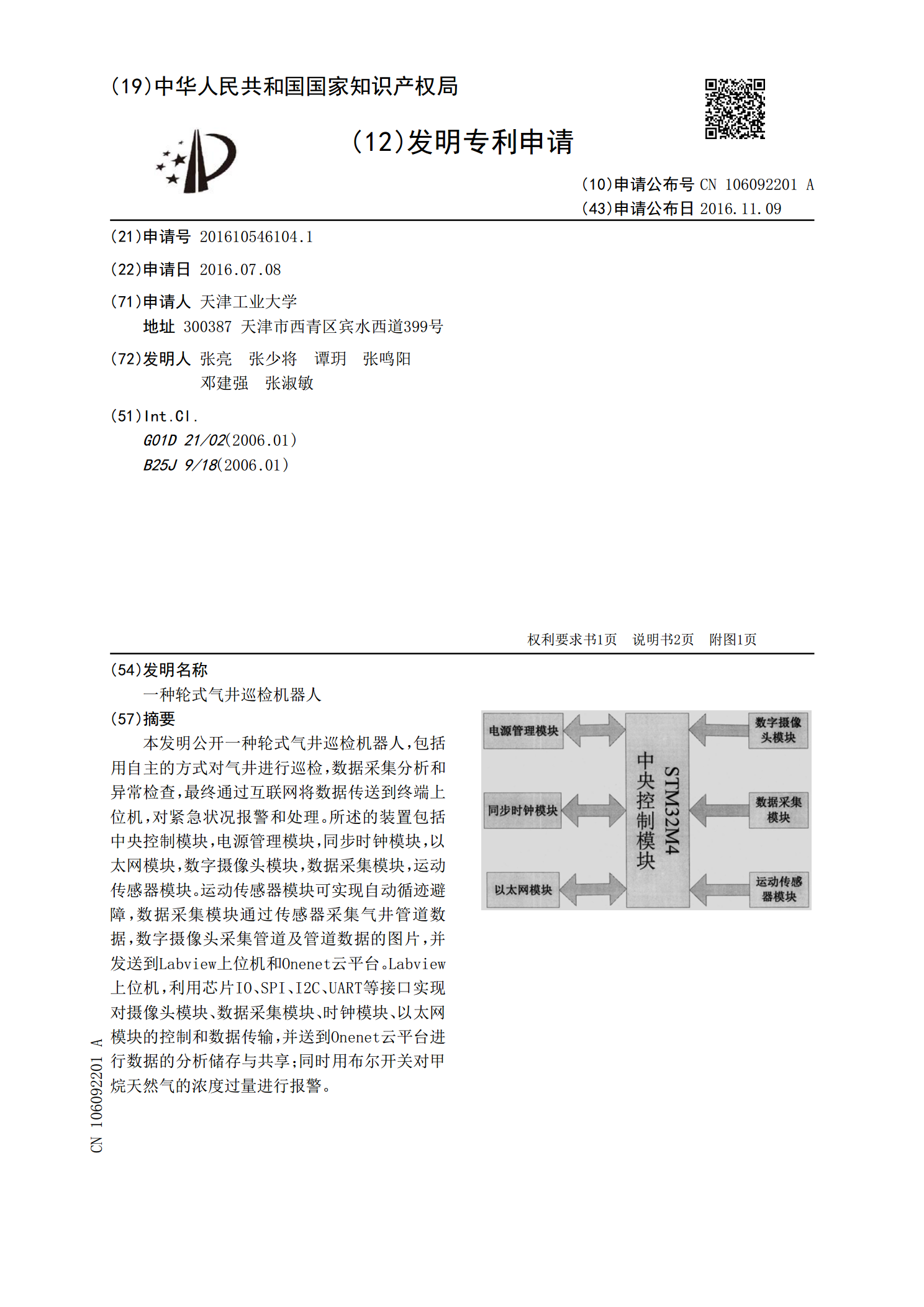
一种轮式气井巡检机器人.pdf
本发明公开一种轮式气井巡检机器人,包括用自主的方式对气井进行巡检,数据采集分析和异常检查,最终通过互联网将数据传送到终端上位机,对紧急状况报警和处理。所述的装置包括中央控制模块,电源管理模块,同步时钟模块,以太网模块,数字摄像头模块,数据采集模块,运动传感器模块。运动传感器模块可实现自动循迹避障,数据采集模块通过传感器采集气井管道数据,数字摄像头采集管道及管道数据的图片,并发送到Labview上位机和Onenet云平台。Labview上位机,利用芯片IO、SPI、I2C、UART等接口实现对摄像头模块、数
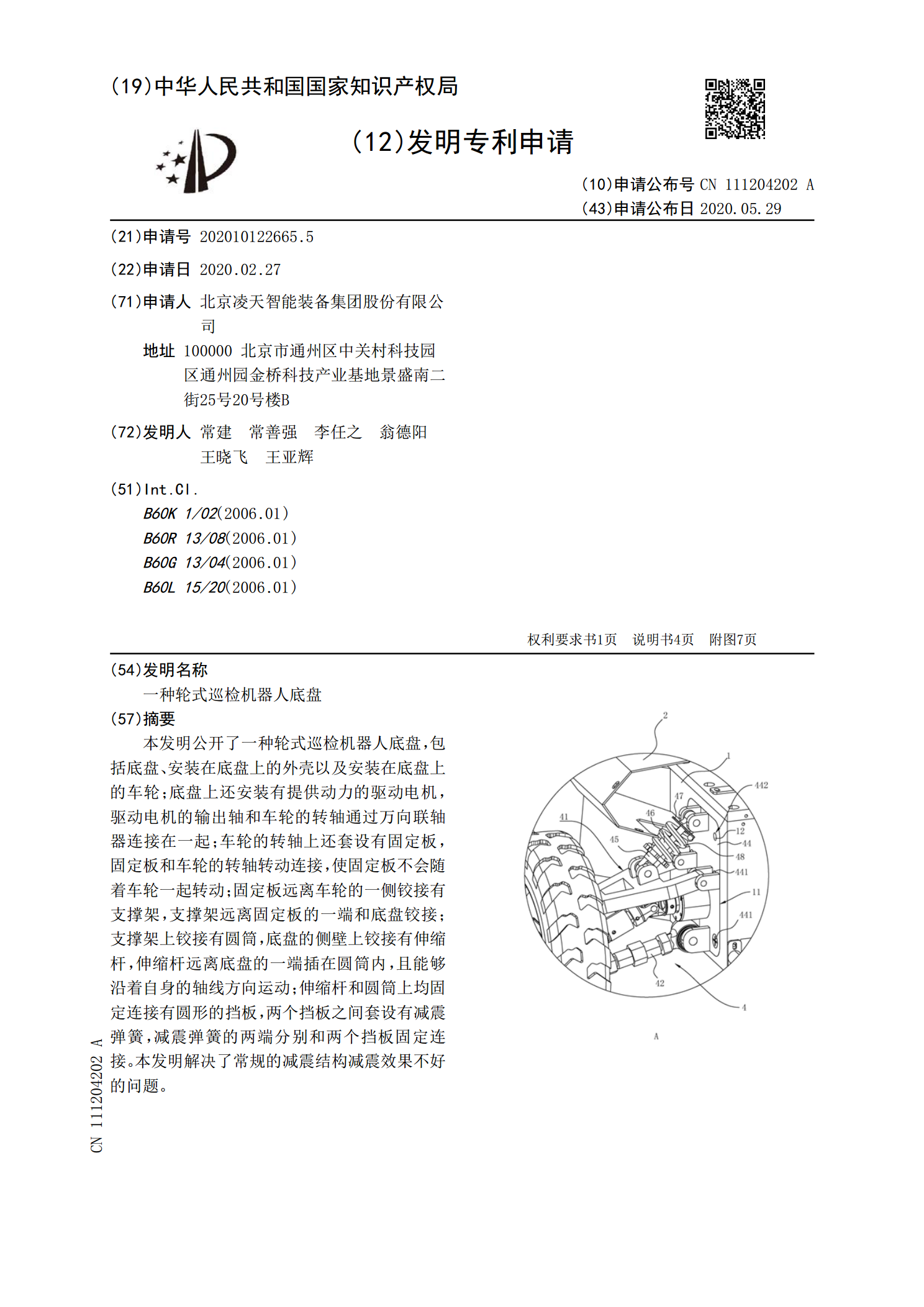
一种轮式巡检机器人底盘.pdf
本发明公开了一种轮式巡检机器人底盘,包括底盘、安装在底盘上的外壳以及安装在底盘上的车轮;底盘上还安装有提供动力的驱动电机,驱动电机的输出轴和车轮的转轴通过万向联轴器连接在一起;车轮的转轴上还套设有固定板,固定板和车轮的转轴转动连接,使固定板不会随着车轮一起转动;固定板远离车轮的一侧铰接有支撑架,支撑架远离固定板的一端和底盘铰接;支撑架上铰接有圆筒,底盘的侧壁上铰接有伸缩杆,伸缩杆远离底盘的一端插在圆筒内,且能够沿着自身的轴线方向运动;伸缩杆和圆筒上均固定连接有圆形的挡板,两个挡板之间套设有减震弹簧,减震弹