
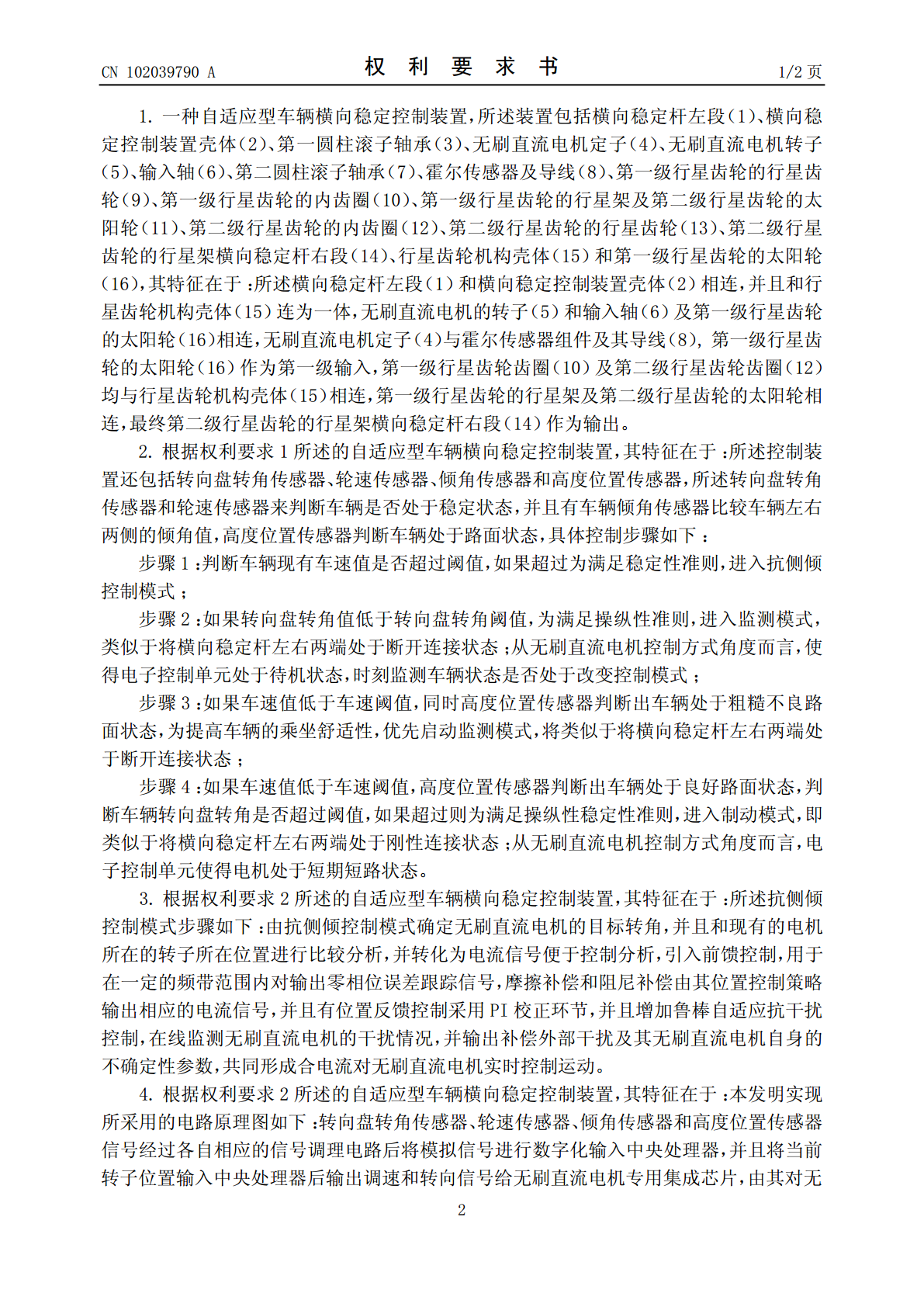
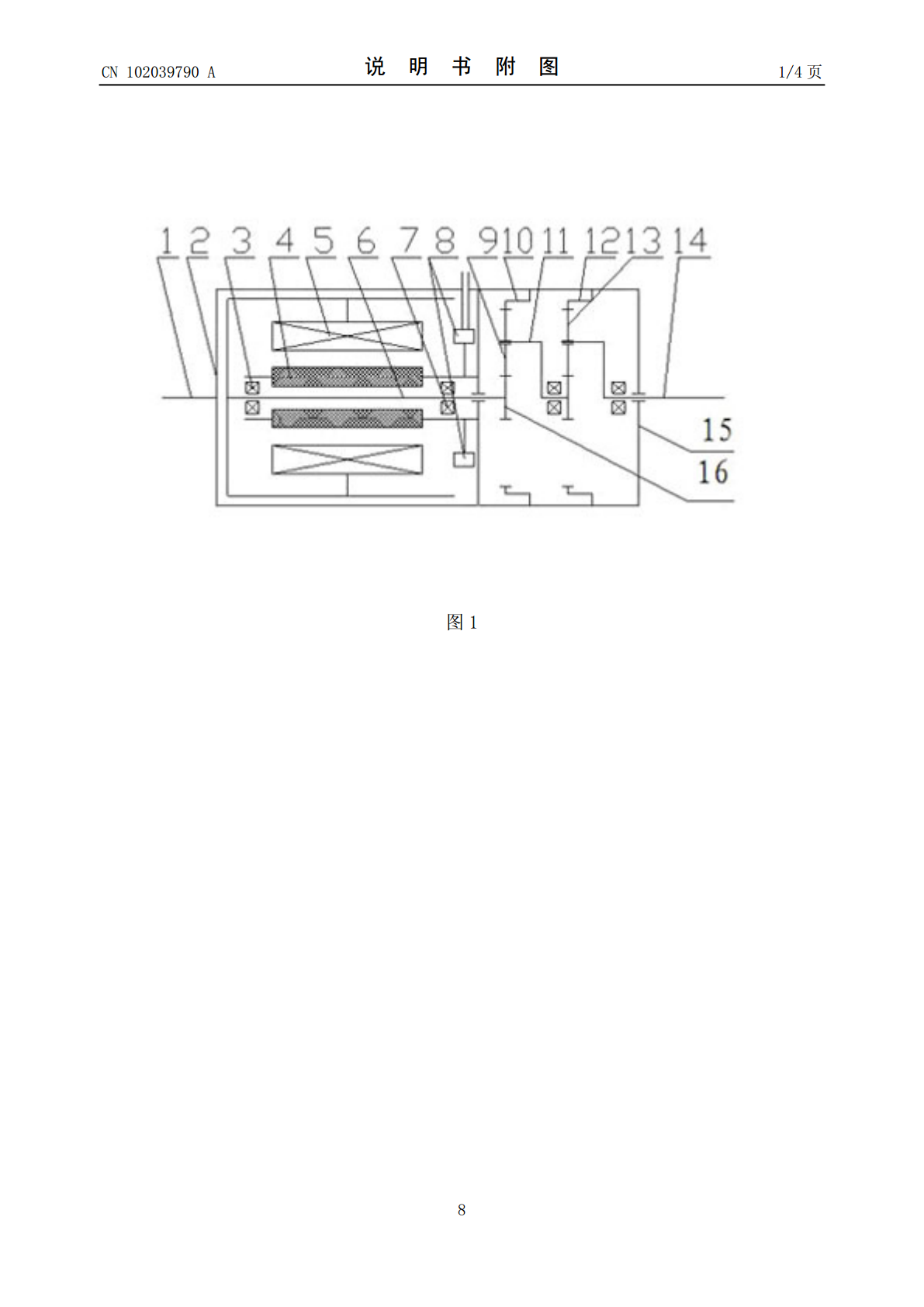
一种自适应型车辆横向稳定控制装置.pdf

一条****彩妍


1/10
2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种自适应型车辆横向稳定控制装置.pdf
本发明提供了一种自适应车辆横向稳定控制装置,轮速传感器求出车速传感器,由转向盘转角传感器判断出车辆的处于转向状态,通过倾角传感器来分别测量车辆行驶过程中的倾斜程度,高度传感器测量车辆在行驶路面上车轮的跳动量,并根据车辆运行状态和车辆状态参数等输入电子控制单元,由无刷直流电机及减速机构组成的控制系统确定抗侧倾扭矩值,控制稳定杆的旋转角度,以达到全主动实时控制车辆侧倾的目的,实现自适应控制汽车行驶的操纵稳定和舒适性。

一种用于轨道车辆的横向稳定装置.pdf
本发明属于转向架技术领域,具体涉及一种用于轨道车辆的横向稳定装置,包括横向布置在轮对与构架端部之间的扭杆,扭杆的两端分别通过纵臂与轮对和构架端部联接,所述纵臂包括第一纵臂和第二纵臂,第一纵臂和第二纵臂均纵向设置,第一纵臂的一端与扭杆固定联接,第一纵臂的另一端通过第一安装座与构架联接,第二纵臂的一端与扭杆固定联接,第二纵臂的另一端通过第二安装座与轮对联接。通过该横向稳定装置和一系垂向悬挂共同提供轮对和构架抗侧滚扭矩的方式,在对该系统的车辆进行侧滚与垂向振动计算的基础上,可适当降低一系垂向刚度和减振器阻尼,达

一种汽车横向稳定性控制装置.pdf
一种汽车横向稳定性控制装置,该装置可以通过车身侧向加速度、车身横摆角速度、车轮侧向作用力信息对汽车横向稳定性进行状态估计,并通过控制汽车横向稳定性控制装置的液压泵、液压缸等部件,控制转向轮的转角,改善汽车的横向稳定性。由于该装置在改善汽车横向稳定性的过程中,不再控制制动系统的制动力,所以可以同时保证汽车的制动性能和横向稳定性能。
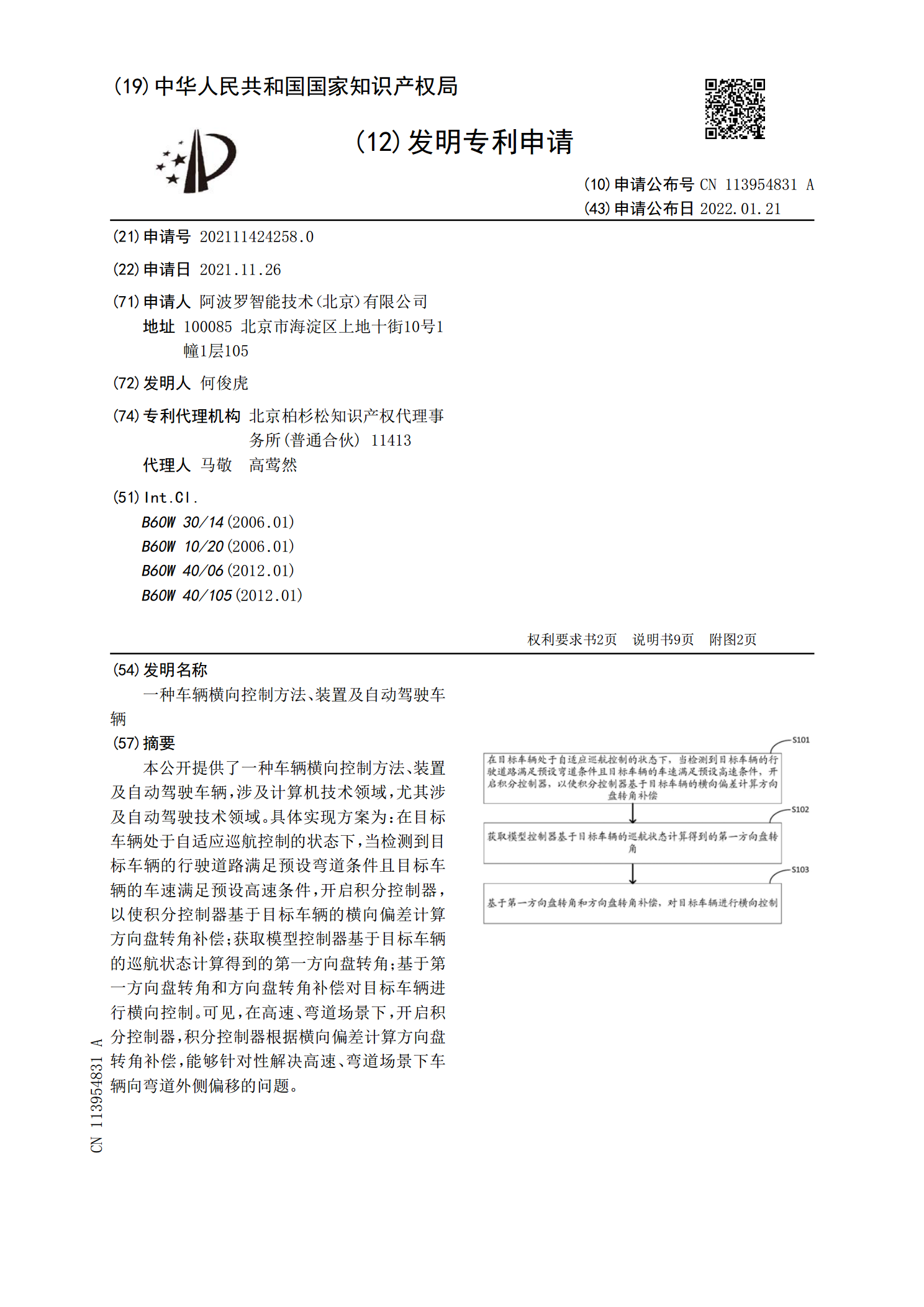
一种车辆横向控制方法、装置及自动驾驶车辆.pdf
本公开提供了一种车辆横向控制方法、装置及自动驾驶车辆,涉及计算机技术领域,尤其涉及自动驾驶技术领域。具体实现方案为:在目标车辆处于自适应巡航控制的状态下,当检测到目标车辆的行驶道路满足预设弯道条件且目标车辆的车速满足预设高速条件,开启积分控制器,以使积分控制器基于目标车辆的横向偏差计算方向盘转角补偿;获取模型控制器基于目标车辆的巡航状态计算得到的第一方向盘转角;基于第一方向盘转角和方向盘转角补偿对目标车辆进行横向控制。可见,在高速、弯道场景下,开启积分控制器,积分控制器根据横向偏差计算方向盘转角补偿,能够
一种工程作业车辆铰接车架横向摆动稳定装置.pdf
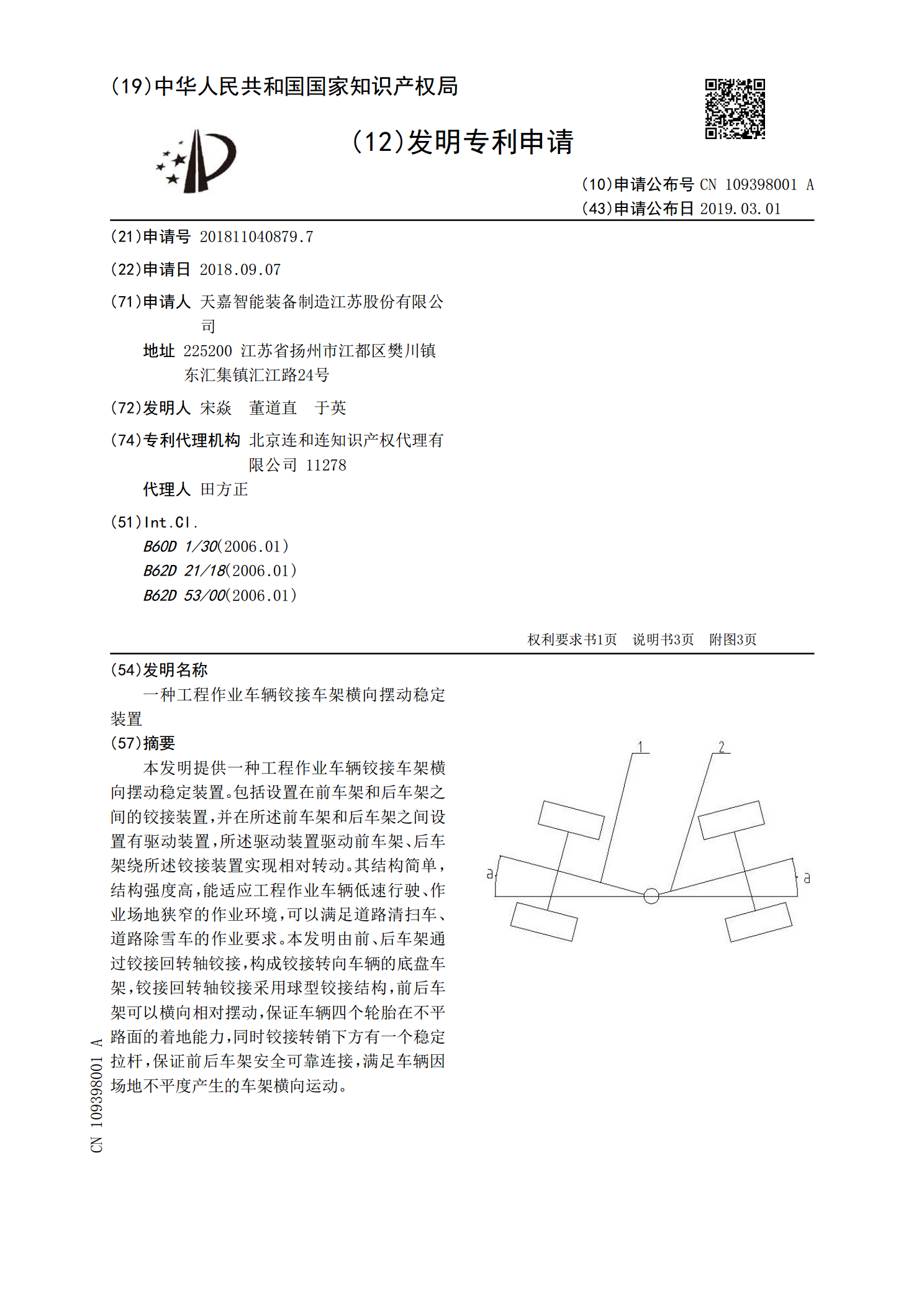
本发明提供一种工程作业车辆铰接车架横向摆动稳定装置。包括设置在前车架和后车架之间的铰接装置,并在所述前车架和后车架之间设置有驱动装置,所述驱动装置驱动前车架、后车架绕所述铰接装置实现相对转动。其结构简单,结构强度高,能适应工程作业车辆低速行驶、作业场地狭窄的作业环境,可以满足道路清扫车、道路除雪车的作业要求。本发明由前、后车架通过铰接回转轴铰接,构成铰接转向车辆的底盘车架,铰接回转轴铰接采用球型铰接结构,前后车架可以横向相对摆动,保证车辆四个轮胎在不平路面的着地能力,同时铰接转销下方有一个稳定拉杆,保证前