
凸轮轮廓检测装置.pdf

宜然****找我


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

凸轮轮廓检测装置.pdf
本发明提供了一种结构简单、检测精度和效率较高的凸轮轮廓检测装置,其包括:用于带动凸轮绕垂向的心轴水平同轴旋转的数控转台、水平设于数控转台一侧的直线电机、设于该直线电机的动子上且于凸轮一侧的激光测量头、用于测量所述动子的水平位移量的光栅尺位移传感器、用于检测凸轮的旋转角度的编码器、以及工控机;所述工控机控制所述数控转台和直线电机动作,并根据所述激光测量头、光栅尺位移传感器和编码器测得的数据得出凸轮的外轮廓数据。

凸轮轮廓检测装置的检测方法.pdf
本发明提供了一种结构简单、检测精度和效率较高的凸轮轮廓检测装置的检测方法,其采用的凸轮轮廓检测装置包括:用于带动凸轮绕垂向的心轴水平同轴旋转的数控转台、水平设于数控转台一侧的直线电机、设于该直线电机的动子上且于凸轮一侧的激光测量头、用于测量所述动子的水平位移量的光栅尺位移传感器、用于检测凸轮的旋转角度的编码器、以及工控机;所述工控机控制所述数控转台和直线电机动作,并根据所述激光测量头、光栅尺位移传感器和编码器测得的数据得出凸轮的外轮廓数据。
一种凸轮轮廓检测装置.pdf
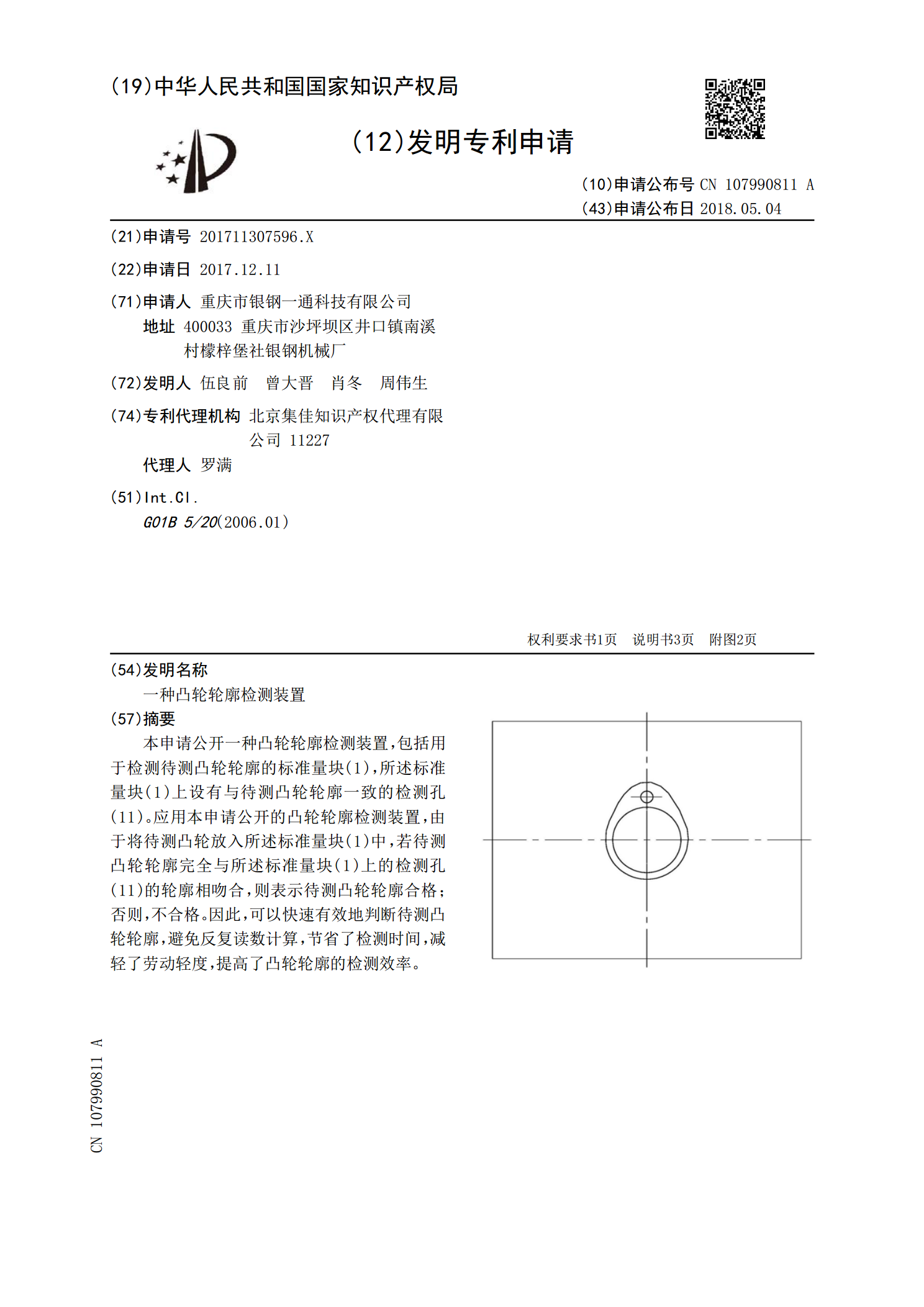
本申请公开一种凸轮轮廓检测装置,包括用于检测待测凸轮轮廓的标准量块(1),所述标准量块(1)上设有与待测凸轮轮廓一致的检测孔(11)。应用本申请公开的凸轮轮廓检测装置,由于将待测凸轮放入所述标准量块(1)中,若待测凸轮轮廓完全与所述标准量块(1)上的检测孔(11)的轮廓相吻合,则表示待测凸轮轮廓合格;否则,不合格。因此,可以快速有效地判断待测凸轮轮廓,避免反复读数计算,节省了检测时间,减轻了劳动轻度,提高了凸轮轮廓的检测效率。

凸轮廓线检测与模拟加工实验装置.pdf
本发明属于机械领域的实验装置,具体是一种凸轮廓线检测与模拟加工实验装置,其可以对凸轮的运动廓线进行检测,同时也可以模拟加工凸轮。凸轮廓线检测与模拟加工实验装置,包括机柜、测轮廓机构、被测凸轮安装机构以及模拟加工实验机构,测轮廓机构包括直线位移传感器、圆柱凸轮测廓杆以及盘形凸轮测廓杆,被测凸轮安装机构包括安装于机柜上并与转动动力相连接的用来安装被测凸轮的凸轮轴;模拟加工机构包括立式铣形式的铣刀部件和工作台部件,所述的工作台部件包括可产生三轴移动和一轴转动的驱动机构以及其上安装的工作台。本发明的有

平面共轭凸轮轮廓检测装置及其控制方法.pdf
一种平面共轭凸轮轮廓检测装置,包括工作台、凸轮旋转机构、检测控制系统,所述凸轮旋转机构的无间隙齿轮减速器的输出轴的上端连接被测平面共轭凸轮,输出轴的下端连接一角度编码器,一升降托架上固定有上水平导轨,上水平导轨上滑动连接有上直线光栅尺,上直线光栅尺的后端由拉线连接一吊锤,在工作台上且处于上水平导轨的下方固定有下水平导轨,下水平导轨上滑动连接有下直线光栅尺,下直线光栅尺的后端连接有压簧,上、下直线光栅尺分别配备上、下电磁自锁机构。本检测装置检测精确度高,能够实现平面共轭凸轮同时测量内、外轮廓尺寸,提高检测效