
双关节同向传动复合欠驱动机器人手指装置.pdf

冬易****娘子

1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

双关节同向传动复合欠驱动机器人手指装置.pdf
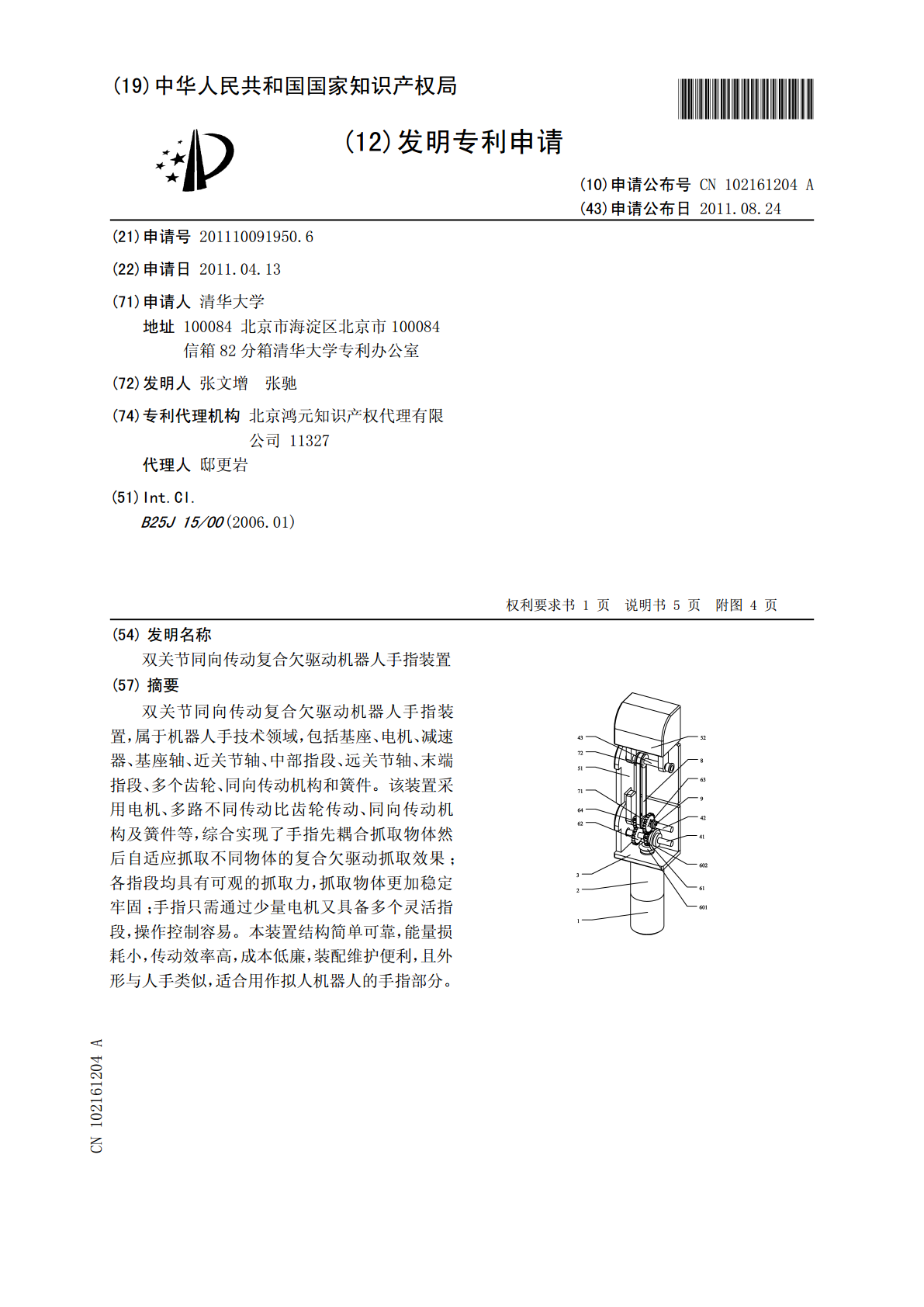
双关节同向传动复合欠驱动机器人手指装置,属于机器人手技术领域,包括基座、电机、减速器、基座轴、近关节轴、中部指段、远关节轴、末端指段、多个齿轮、同向传动机构和簧件。该装置采用电机、多路不同传动比齿轮传动、同向传动机构及簧件等,综合实现了手指先耦合抓取物体然后自适应抓取不同物体的复合欠驱动抓取效果;各指段均具有可观的抓取力,抓取物体更加稳定牢固;手指只需通过少量电机又具备多个灵活指段,操作控制容易。本装置结构简单可靠,能量损耗小,传动效率高,成本低廉,装配维护便利,且外形与人手类似,适合用作拟人机器人的手指

双关节斜带式传动复合欠驱动机器人手指装置.pdf
双关节斜带式传动复合欠驱动机器人手指装置,属于仿人机器手技术领域,包括电机、减速器、基座、中部指段、末端指段、基座轴、近关节轴、远关节轴、多个齿轮、主动轮、从动轮,传动件、两个轴簧件及近关节轴传动装置。该装置中,基座轴与近关节轴均活动套设于基座中,第二齿轮活动套接在近关节轴上并与近关节轴之间连接有簧件。中部指段套固于近关节轴上,远关节轴套固于中部指段上。主动轮活动套接在基座轴上,从动轮活动套接于远关节轴上并与远关节轴之间连接有簧件。该装置利用主动轮与从动轮之间的反向传动机构与簧件解耦综合作用实现了手指自适

双关节三轴轮式复合欠驱动机器人手指装置.pdf
双关节三轴轮式复合欠驱动机器人手指装置,属于仿人机器手技术领域,包括基座、电机、减速器、基座轴、近关节轴、中部指段、远关节轴、末端指段、多路传动机构和簧件。本发明装置采用单个电机、多轴多路相异传动比的传动机构及簧件等综合实现了复合欠驱动抓取效果:手指先耦合转动抓向物体然后再自适应抓取物体;抓取过程拟人,动作灵巧,抓取物体稳定,可自动适应抓取不同尺寸、形状的物体,对控制系统要求低,操控容易;同时结构简单、紧凑,能量损耗小,传动效率高,成本低廉,装配维护便利,且外形与人手指相近,适用于仿人机器手。

差动锥齿轮系复合欠驱动双关节机器人手指装置.pdf
差动锥齿轮系复合欠驱动双关节机器人手指装置,属于仿人机器人手技术领域,包括基座、电机、减速器、基座轴、近关节轴、中部指段、远关节轴、末端指段、双联锥齿轮和簧件。本发明装置采用单个电机、差动锥齿轮系传动机构及簧件等综合实现了复合欠驱动抓取效果:手指先耦合转动抓向物体然后再自适应抓取物体;抓取过程拟人,动作灵巧,抓取物体稳定,可自动适应抓取不同尺寸、形状的物体,对控制系统要求低,操控容易;同时结构简单、紧凑,控制精确、能量损耗小,传动效率高,成本低廉,装配维护便利,且外形与人手指相近,适用于仿人机器手。

双关节三轴轮式复合欠驱动机器人手指装置.pdf
双关节三轴轮式复合欠驱动机器人手指装置,属于仿人机器人手技术领域,包括基座、电机、减速器、基座轴、近关节轴、中部指段、远关节轴、末端指段、多路传动机构和簧件。本发明装置采用单个电机、多轴多路相异传动比的传动机构及簧件等综合实现了复合欠驱动抓取效果:手指先耦合转动抓向物体然后再自适应抓取物体;抓取过程拟人,动作灵巧,抓取物体稳定,可自动适应抓取不同尺寸、形状的物体,对控制系统要求低,操控容易;同时结构简单、紧凑,能量损耗小,传动效率高,成本低廉,装配维护便利,且外形与人手指相近,适用于仿人机器手。