
高精度不抬起定位的高速大惯量薄型数控回转分度台.pdf

建英****66


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

高精度不抬起定位的高速大惯量薄型数控回转分度台.pdf
本发明为一种高精度不抬起定位的高速大惯量薄型数控回转分度台,涉及一种回转分度台。本发明的目的是提供一种能实现大惯量旋转,且尺寸薄,能精确定位的同时工作台无须抬起,操作方便可靠的回转分度台。采用的技术方案是:高精度不抬起定位的高速大惯量薄型数控回转分度台,包括设置在台面下方的伺服电机,伺服电机通过同步带与台面上设置的蜗轮副连接,转盘设置在蜗轮副上方且由蜗轮副带动旋转,蜗轮副设置于箱体内,转盘下方设置有用于对转盘进行径向定位的定位器,定位器位于箱体内,其中伺服电机停止时定位器动作,定位器退回后伺服电机启动。本

高精度回转分度盘.pdf
本发明提供了高精度回转分度盘,其能解决传统蜗轮蜗杆传动的分度装置存在的结构复杂、分度误差大的问题,并能够便捷适用于大型零件的分度作业,提高加工效率。其包括底座、分度盘、回转盘和分度插销,分度盘上开有分度槽,分度插销安装于回转盘上,分度盘固装于底座上,回转盘可转动地安装于底座上,并且分度盘与所述回转盘同心设置,分度盘与回转盘之间通过分度插销定位锁紧,分度盘与回转盘定位锁紧时分度插销插入分度盘的分度槽内,回转盘通过所述平面回转轴承支承于底座上。

高速高效率数控分度台.pdf
本发明涉及一种的新型高速高效率数控分度台,其包括以下几个部分:准双曲面齿轮(Hypoidgear)型旋转驱动部,其设置在旋转驱动用伺服发动机的轴与上述旋转台下侧的锭子之间,当伺服发动机的旋转动力向旋转台传递时完全不会出现轮齿隙或者打滑现象,并具有优良的耐久性和强度,同时还能进行噪音小(安静)的精密高速分割动作;压垫型自动制动装置,其设置在上述准双曲面齿轮型旋转驱动部下侧的下部支座一侧,当施加一定的液压气动时,制动活塞就会精确地上下运行并对制动垫施压接触或施压解除,从而实现制动控制;高效制动自动解除装置,其
回转分度台.pdf
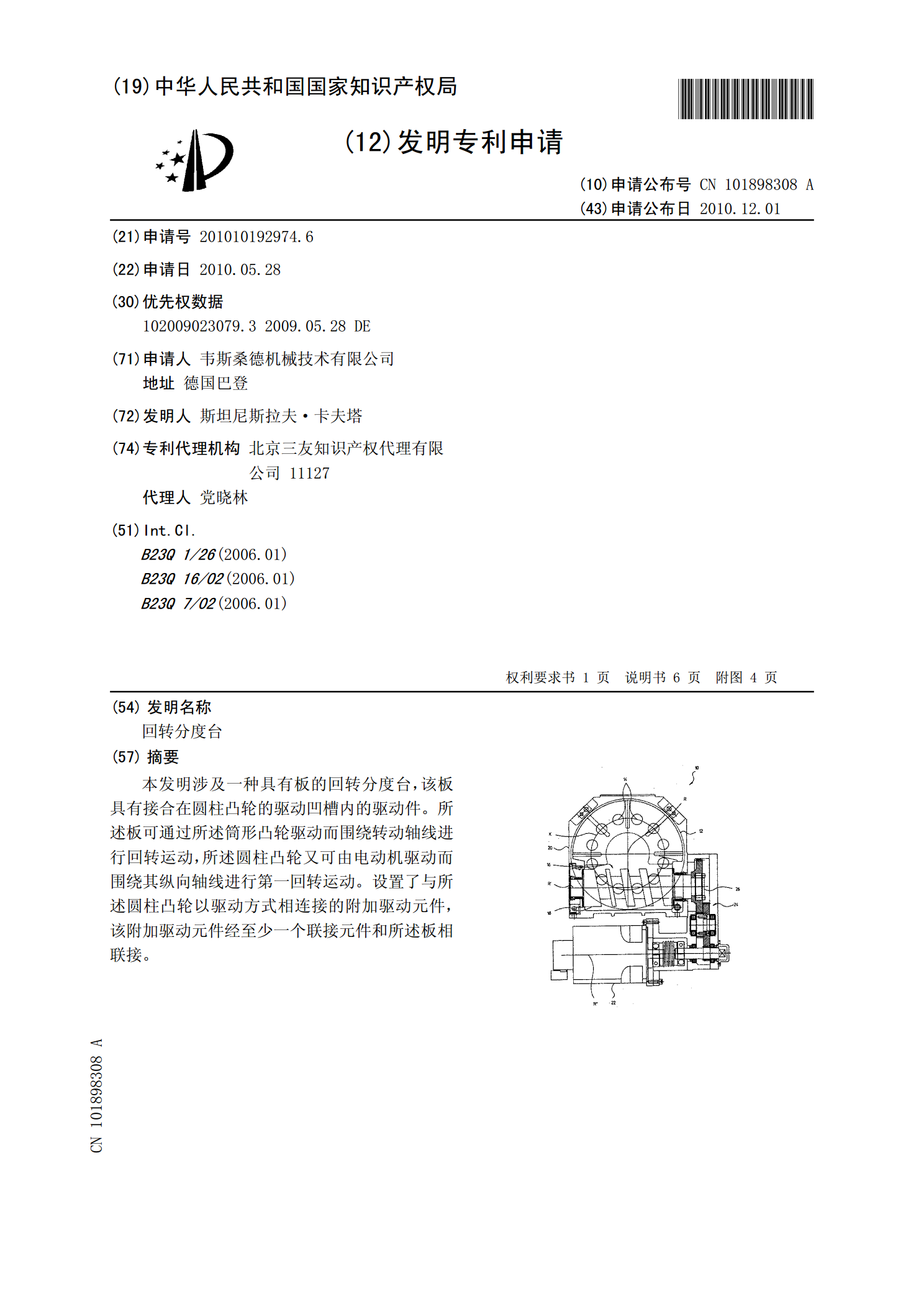
本发明涉及一种具有板的回转分度台,该板具有接合在圆柱凸轮的驱动凹槽内的驱动件。所述板可通过所述筒形凸轮驱动而围绕转动轴线进行回转运动,所述圆柱凸轮又可由电动机驱动而围绕其纵向轴线进行第一回转运动。设置了与所述圆柱凸轮以驱动方式相连接的附加驱动元件,该附加驱动元件经至少一个联接元件和所述板相联接。

高精度重载静压数控回转工作台.pdf
本发明公开了一种高精度重载静压数控回转工作台,其设有回转工作台,特征在于设有工作台底座、静压导轨板、静压锥环、驱动齿圈、减速箱和伺服电机,工作台底座上端设有凸台,两侧分别设有减速箱,凸台周边设有环形凹槽,环形凹槽内设有静压导轨板,回转工作台下端设有导轨面,中心孔下端设有锥形孔,回转工作台经导轨面与工作台底座上设有的静压导轨板相接触,静压锥环下端设有凹槽,静压锥环经凹槽与工作台底座上端的凸台相套合并经螺栓固定在凸台上,静压锥环与回转工作台下端设有的锥形孔相配合定位,静压锥环的锥形面上设有油腔,回转工作台外圆