
一种卵胞浆内单精子自动注射中的卵胞位姿确定方法.pdf

Ro****44


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种卵胞浆内单精子自动注射中的卵胞位姿确定方法.pdf
本发明公开了卵胞浆内单精子自动注射中的卵胞位姿确定方法,将彩色图像转化为灰度图像并中值滤波处理等步骤,确定微吸附针和微注射针的位置、确定卵胞的位置和姿态,用Otsu自适应阈值法对灰度图像进行二值化处理等步骤,依次沿卵胞区域轮廓的各像素点,往该区域的中心方向取n个像素点求均值,形成序列S,求序列S的均值Savg,判断S中各点的值是否均在区间[Savg-Ts,Savg+Ts]中:若是,则在卵胞区域内部用Hough圆检测方法检测半径为rp的圆,将该坐标从图像坐标系映射到卵胞局部坐标系中,坐标为(xp,yp),通
一种全自动精子卵胞浆显微注射系统.pdf
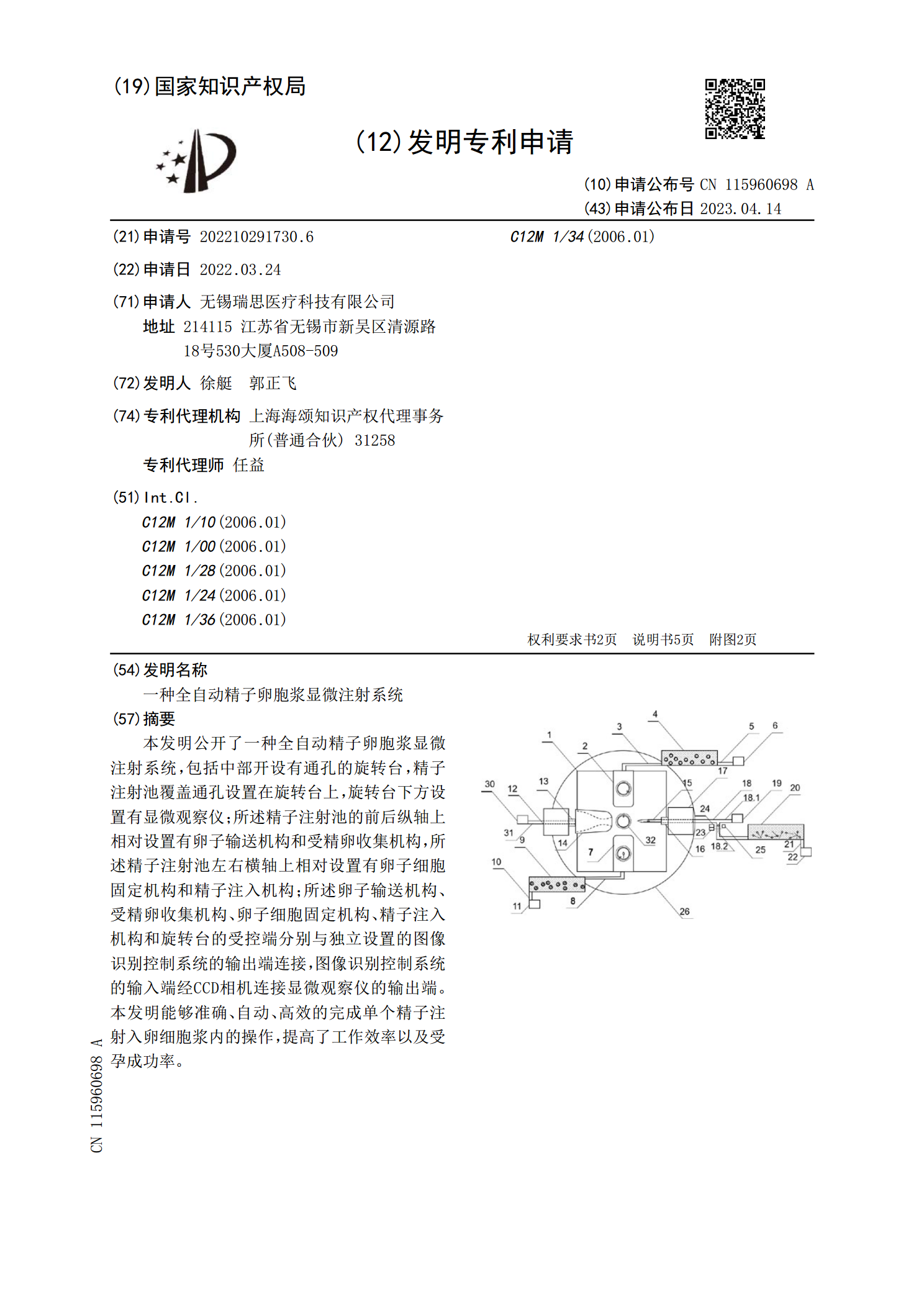
本发明公开了一种全自动精子卵胞浆显微注射系统,包括中部开设有通孔的旋转台,精子注射池覆盖通孔设置在旋转台上,旋转台下方设置有显微观察仪;所述精子注射池的前后纵轴上相对设置有卵子输送机构和受精卵收集机构,所述精子注射池左右横轴上相对设置有卵子细胞固定机构和精子注入机构;所述卵子输送机构、受精卵收集机构、卵子细胞固定机构、精子注入机构和旋转台的受控端分别与独立设置的图像识别控制系统的输出端连接,图像识别控制系统的输入端经CCD相机连接显微观察仪的输出端。本发明能够准确、自动、高效的完成单个精子注射入卵细胞浆内

卵胞浆内单精子显微注射术成功妊娠2例.doc
卵胞浆内单精子显微注射术成功妊娠2例作者:胡蓉,刘春莲,吴昕,赵君利,哈灵侠,景万单位:宁夏医科大学附属医院,宁夏银川【关键词】卵胞浆内单精子显微注射术;妊娠;不育我院于2008年5月开展卵胞浆内单精子显微注射术(ICSI),实施的2例患者获成功临床妊娠,现报告如下。1临床资料病例1,男,26岁,婚后1年不育,6次精液常规分析:精子密度0.13-5.67×106/ml,a级0-9.09%,b级0%,活率0-9.09%;精液形态分析:精子畸形率达88.3%。诊断:①原发性不育;②重度少弱精子症;

附睾和睾丸冷冻精子行卵胞浆内单精子注射临床效果.docx
附睾和睾丸冷冻精子行卵胞浆内单精子注射临床效果自1992年卵胞浆内单精子注射[1]问世以来,实现了男性少、弱,畸形精子症患者获得遗传学后代的愿望,1993年Schoysman等[2]报道了无精子症患者应用睾丸精子行ICSI获得成功。此后,经皮附睾抽吸、睾丸切开行ICSI已作为有正常生精的梗阻性无精或睾丸衰竭的非梗阻性无精及不射精患者常规治疗方法。临床上,无精子症患者在排除遗传性疾病的基础上一般首先要进行附睾或睾丸的诊断性活检,其参数可预测附睾或睾丸内是否有精子。为了避免在其后的ICSI周期中反复的睾丸手术

部分卵子卵胞浆内单精子注射在辅助生殖中的应用的开题报告.docx
部分卵子卵胞浆内单精子注射在辅助生殖中的应用的开题报告题目:部分卵子卵胞浆内单精子注射在辅助生殖中的应用摘要:随着生殖技术的发展,辅助生殖技术在不孕不育治疗中得到了广泛应用。其中,部分卵子卵胞浆内单精子注射技术(ICSI)被广泛应用于人类不孕不育的治疗。本文主要介绍ICSI技术的原理、操作步骤、临床应用等方面的内容。ICSI技术的主要优势是可以直接注射单个精子,避免了由于没能进入卵子而浪费的精子,大大提高了精子成功率。此外,ICSI技术也可以解决一些男性不育症的问题,例如精液质量差、精子畸形等。然而,IC