
基于CUDA的图像边缘检测方法.docx

骑着****猪猪


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于CUDA的图像边缘检测方法.docx
基于CUDA的图像边缘检测方法基于CUDA的图像边缘检测方法摘要:图像边缘检测作为图像处理的基本操作之一,广泛应用于计算机视觉、图像分析、机器视觉、医学诊断和其他领域中。在本文中,我们介绍了一种基于CUDA的图像边缘检测方法。我们使用CUDA技术来利用GPU的并行性加速边缘检测算法,具有高效、准确、低延迟和可扩展性等优点。我们将方法验证在多个数据集上,结果表明,该方法相比于传统的CPU实现方法具有更好的性能和效率。关键词:CUDA,图像边缘检测,GPU加速1.引言在计算机视觉、图像分析和其他领域中,图像边

基于MATLAB图像边缘检测方法的研究.docx
基于MATLAB图像边缘检测方法的研究引言图像边缘检测一直是数字图像处理中的重要问题之一。边缘通常是图像中的一些重要和有意义的特征,因为它们能够帮助我们理解图像中的对象边界、形状和结构。图像边缘检测技术可以通过检测像素值或颜色的不连续性来确定边缘位置。目前广泛使用的边缘检测算法有Sobel算符、Prewitt算符、Canny算法等。其中Canny算法以其优异的性能和效果成为了最受欢迎的边缘检测算法之一。本文旨在研究利用MATLAB实现边缘检测的方法,并对各种边缘检测算法进行比较和分析。MATLAB图像边缘

CUDA下地质图像边缘检测算法并行优化.docx
CUDA下地质图像边缘检测算法并行优化CUDA下地质图像边缘检测算法并行优化摘要:地质图像边缘检测是地质学和地球科学领域中的重要任务之一。然而,地质图像边缘检测算法在大规模数据集上计算量巨大,对计算资源的要求较高。本文提出了一种在CUDA平台下的地质图像边缘检测算法并行优化方法,通过对算法进行并行化处理,利用GPU的并行计算能力,加速地质图像边缘检测过程。实验结果表明,优化后的算法相比传统的串行算法具有更高的性能和更快的速度。关键词:地质图像;边缘检测;CUDA;并行优化1.引言地质图像边缘检测是地质学和
基于小波变换的图像边缘检测方法.pdf
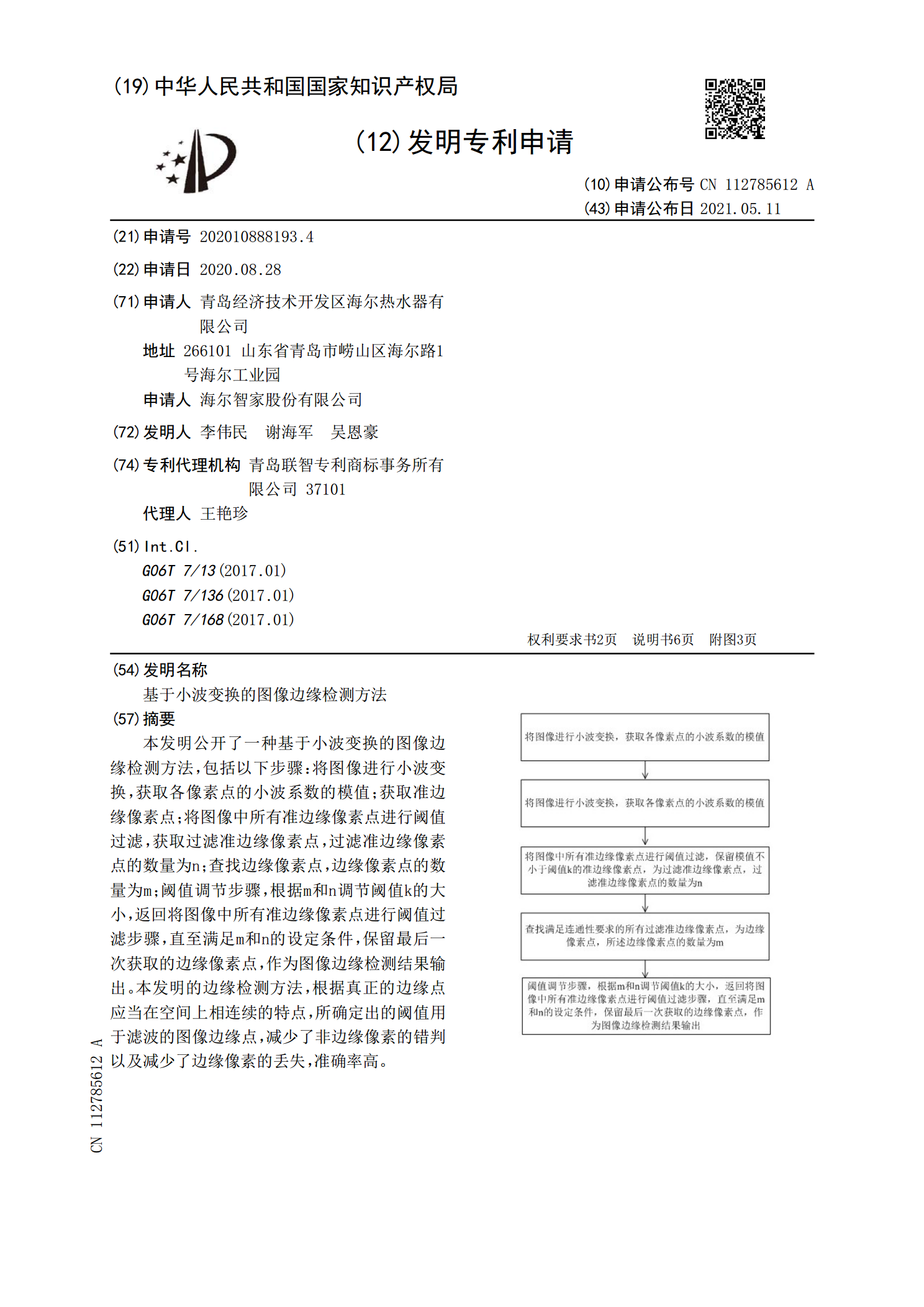
本发明公开了一种基于小波变换的图像边缘检测方法,包括以下步骤:将图像进行小波变换,获取各像素点的小波系数的模值;获取准边缘像素点;将图像中所有准边缘像素点进行阈值过滤,获取过滤准边缘像素点,过滤准边缘像素点的数量为n;查找边缘像素点,边缘像素点的数量为m;阈值调节步骤,根据m和n调节阈值k的大小,返回将图像中所有准边缘像素点进行阈值过滤步骤,直至满足m和n的设定条件,保留最后一次获取的边缘像素点,作为图像边缘检测结果输出。本发明的边缘检测方法,根据真正的边缘点应当在空间上相连续的特点,所确定出的阈值用于滤

基于深度卷积网络的图像边缘检测方法.docx
基于深度卷积网络的图像边缘检测方法基于深度卷积网络的图像边缘检测方法摘要:在计算机视觉领域,图像边缘检测是一项重要的任务,它对于图像分割、目标识别等任务具有关键作用。随着深度学习的发展,深度卷积神经网络已经在图像边缘检测中取得了显著的成果。本文将重点介绍基于深度卷积网络的图像边缘检测方法,并对其进行讨论和分析。1.引言图像边缘是指像素之间灰度或色彩发生剧烈变化的区域。边缘检测是计算机视觉领域的一个重要任务,它可以帮助分割图像、检测目标、提取特征等。传统的图像边缘检测方法主要基于滤波器和阈值处理,但这些方法