
数控磨床砂轮角度调整机构.pdf

是浩****32


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

数控磨床砂轮角度调整机构.pdf
本发明公开了一种数控磨床砂轮角度调整机构。其包括基座、砂轮主轴箱、电机和滚珠丝杠,砂轮主轴箱可绕一第一轴线转动;电机可绕一第二轴线转动,滚珠丝杠的螺杆一端与电机联接,另一端自由悬空,其螺母座与砂轮主轴箱联接,当所述螺母座在螺杆上直线运动时,其带动砂轮主轴箱绕第一轴线转动。本发明具有控制实现简单、回转精度高、角度调整精度高、结构紧凑和工艺性好的特点,可广泛用于各种工件的磨削加工,同时,本发明的构思也可用于其他需精确控制角度的机械结构。

复合数控磨床高精度砂轮架分度机构.pdf
本发明属于机械技术领域,具体为一种复合数控磨床的砂轮架分度机构。主要包括回转砂轮架,滑座,立柱,轴承座,力矩电机,角度编码器,锁紧装置等。轴承座安装固定在滑座内,滑座上面放置回转砂轮架,回转砂轮架与轴承座之间安装有力矩电机,立柱固定在滑座内,顶部安装用于控制定位精度的角度编码器及相关安全锁紧装置。该机构使用力矩电机直接驱动砂轮架分度,一次装夹可以完成多功能磨削加工,通过砂轮架的回转定位,保证砂轮的精准替换,从而实现磨削外圆、端面、锥面、内孔等多功能磨削。??
数控磨床砂轮修整器.pdf
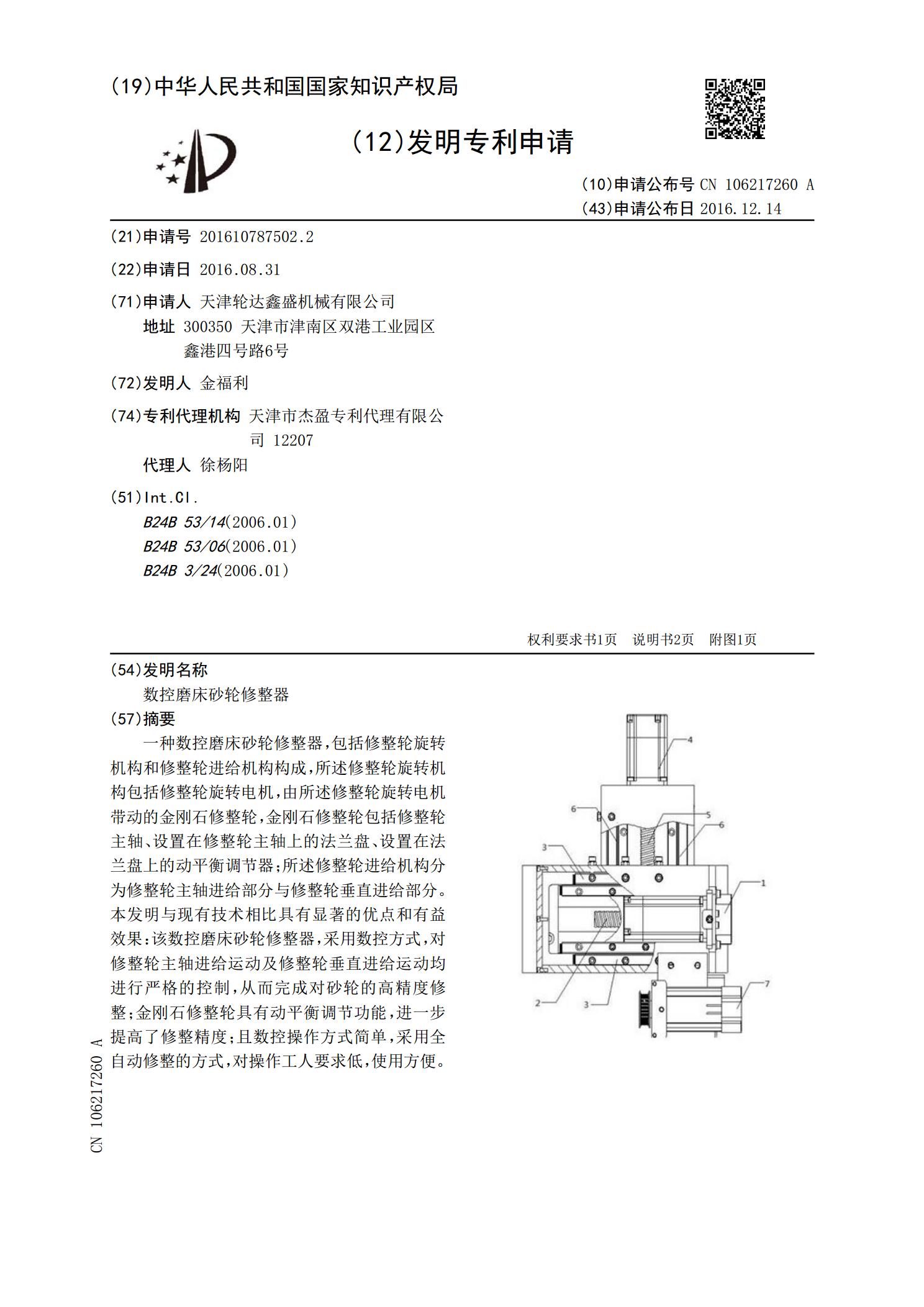
一种数控磨床砂轮修整器,包括修整轮旋转机构和修整轮进给机构构成,所述修整轮旋转机构包括修整轮旋转电机,由所述修整轮旋转电机带动的金刚石修整轮,金刚石修整轮包括修整轮主轴、设置在修整轮主轴上的法兰盘、设置在法兰盘上的动平衡调节器;所述修整轮进给机构分为修整轮主轴进给部分与修整轮垂直进给部分。本发明与现有技术相比具有显著的优点和有益效果:该数控磨床砂轮修整器,采用数控方式,对修整轮主轴进给运动及修整轮垂直进给运动均进行严格的控制,从而完成对砂轮的高精度修整;金刚石修整轮具有动平衡调节功能,进一步提高了修整精度

一种砂轮头可旋转角度的数控磨床.pdf
本发明公开了一种砂轮头可旋转角度的数控磨床,砂轮可倾斜翻折进行磨削螺纹与磨齿,砂轮也可左右摆角,来进行磨削圆锥面。本发明的砂轮头底座上的第一伺服马达通过第一滚珠丝杆驱动滑板固定板在第一导轨上滑动,滑板固定板上安装有第一直驱电机,第一直驱电机上安装有砂轮连接座,砂轮连接座上安装有第二直驱电机,第二直驱电机上连接有电主轴固定座,电主轴固定座上安装有电主轴,通过电主轴连接驱动砂轮实现磨削加工。本发明的第一直驱电机和第二直驱电机分别旋转可控制电主轴上的砂轮左右旋转或倾斜,修整后的砂轮可对工件的外圆锥面、齿轮或螺纹

一种工具磨床上砂轮的角度调整装置.pdf
本发明创造属于机械制造领域,提供一种工具磨床上砂轮的角度调整装置,包括设于本体上的角度刻度盘和基准块;旋转轴穿过该角度刻度盘的中心于滑道连接;刀座与滑道滑动连接且滑道两端设有滑块限位部件;刀座上设有砂轮刀。该调整装置可将标准砂轮改制成0-90度任意角度的磨角度砂轮,改制精度可达到分。