
具有弹性阻尼环节的四足仿生机器人步行腿研究.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

具有弹性阻尼环节的四足仿生机器人步行腿研究.docx
具有弹性阻尼环节的四足仿生机器人步行腿研究引言现代发达的科技带来了许多机器人应用,仿生机器人是当前机器人研究领域的热点之一。仿生机器人是通过对生物体的学习和模仿,将其特定的行为或者结构应用到机器人中,从而实现人工生物结构的目的。四足仿生机器人作为其中的一个重要分支,它既保留了四足动物的稳定性和坚韧性,又具备了机器人的高强度、高精度和高适应性,越来越受到人们的关注。但是,四足仿生机器人的步行在实际应用过程中,容易因为地面起伏、不同的地形、荷载变化等因素而造成机器人的震动和失常。怎样优化四足仿生机器人的步态,

仿生四足机器人单腿轨迹规划研究.docx
仿生四足机器人单腿轨迹规划研究摘要仿生四足机器人的研究已成为机器人领域研究的热点。单腿轨迹规划是仿生四足机器人实现稳定行走的重要构成部分。本文介绍了仿生四足机器人的原理及其单腿的结构,阐述了单腿运动的基本规律,提出了单腿轨迹规划的方法,并通过仿真实验验证了方法的有效性。关键词:仿生四足机器人;单腿轨迹规划;稳定行走;仿真实验。AbstractTheresearchonbionicquadrupedrobotshasbecomeahotspotinthefieldofrobotics.Singlelegtr

一种具有柔性腰部和弹性腿的柔顺四足机器人.pdf
本发明涉及一种四足步行机器人,具体涉及一种具有柔性腰部和弹性腿的柔顺四足机器人。分为前躯干、脊柱、腰部、后躯干以及四条结构相同的腿几部分;前躯干或后躯干中的轴承与各条腿上的法兰轴构成转动副,前躯干与脊柱用转动副连接,由电机和齿轮组驱动,使机器人身体具有俯仰的自由度,脊柱与腰部用带有扭簧的转动副连接,使机器人身体具有横滚自由度,腰部和后躯干也用带有扭簧的转动副连接,使机器人身体具有偏转自由度,机器人腿部由大腿,小腿构成,都由电机和齿轮组驱动,小腿装有压簧,使机器人行走时地面冲击力减小。该发明采用柔性机构替代

带有弹性四杆机构的四足机器人腿.pdf
本发明提供的是一种带有弹性四杆机构的四足机器人腿。包括大腿、小腿、足部、拉簧、卷线轮,大腿的一端连接到动力源的输出轴上构成髋关节,卷线轮与大腿的这一端通过转动副相连且卷线轮的轴线与动力源的输出轴共轴,大腿的另一端与小腿的一端通过转动副相连构成膝关节,小腿的另一端与足部在足部的四分之一处通过转动副相连构成踝关节,拉簧的一端与大腿中部通过转动副相连,拉簧的另一端与足部的一端通过转动副相连,钢丝绳的一端固定在踝关节上,钢丝绳跨过卷线轮接动力源。本发明采用被动自由度,减少了能量的损耗,该被动自由度通过四连杆机构实
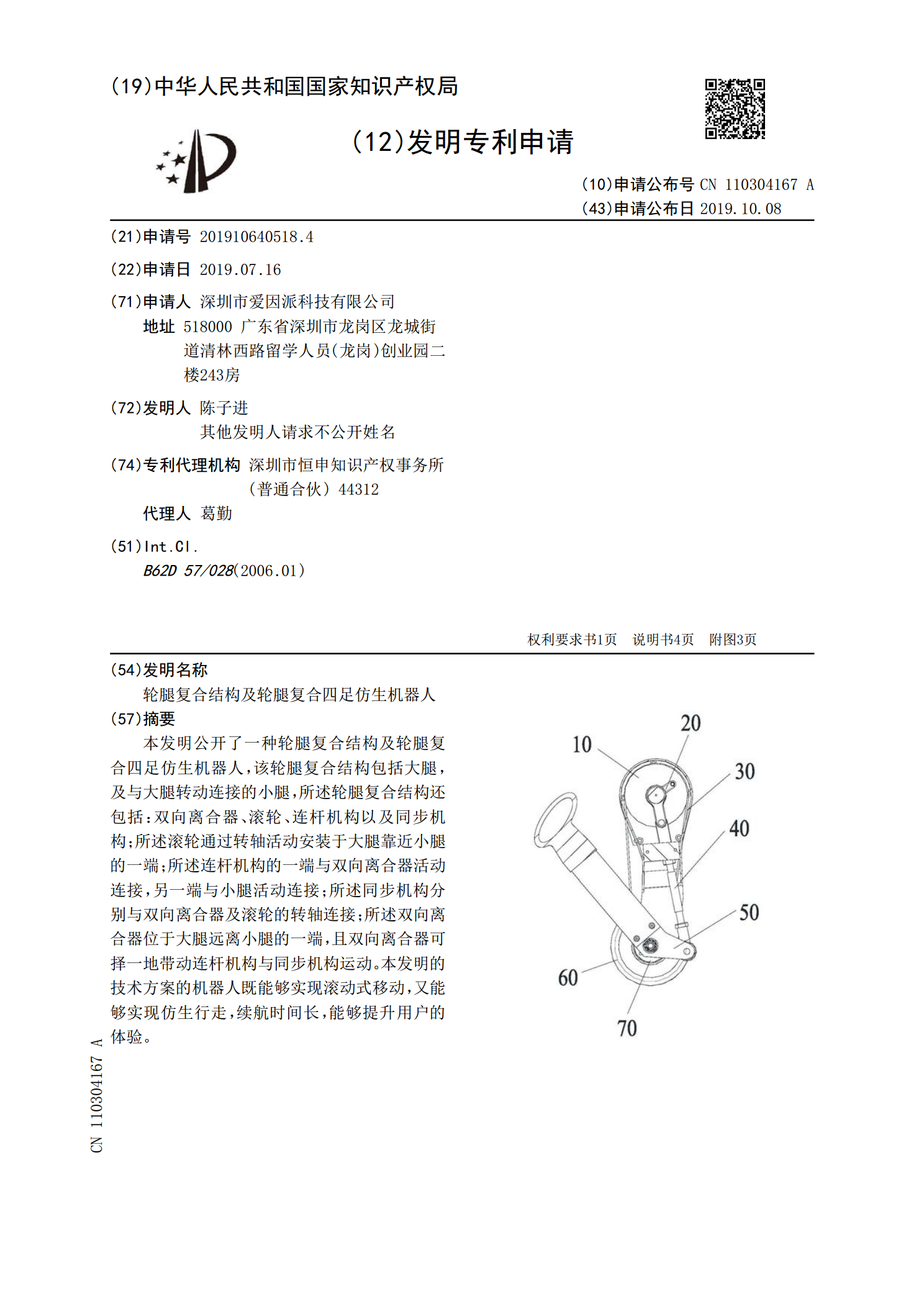
轮腿复合结构及轮腿复合四足仿生机器人.pdf
本发明公开了一种轮腿复合结构及轮腿复合四足仿生机器人,该轮腿复合结构包括大腿,及与大腿转动连接的小腿,所述轮腿复合结构还包括:双向离合器、滚轮、连杆机构以及同步机构;所述滚轮通过转轴活动安装于大腿靠近小腿的一端;所述连杆机构的一端与双向离合器活动连接,另一端与小腿活动连接;所述同步机构分别与双向离合器及滚轮的转轴连接;所述双向离合器位于大腿远离小腿的一端,且双向离合器可择一地带动连杆机构与同步机构运动。本发明的技术方案的机器人既能够实现滚动式移动,又能够实现仿生行走,续航时间长,能够提升用户的体验。