
单元五工业机器人搬运工作站的系统设计.ppt

YY****。。


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

单元五工业机器人搬运工作站的系统设计.pptx
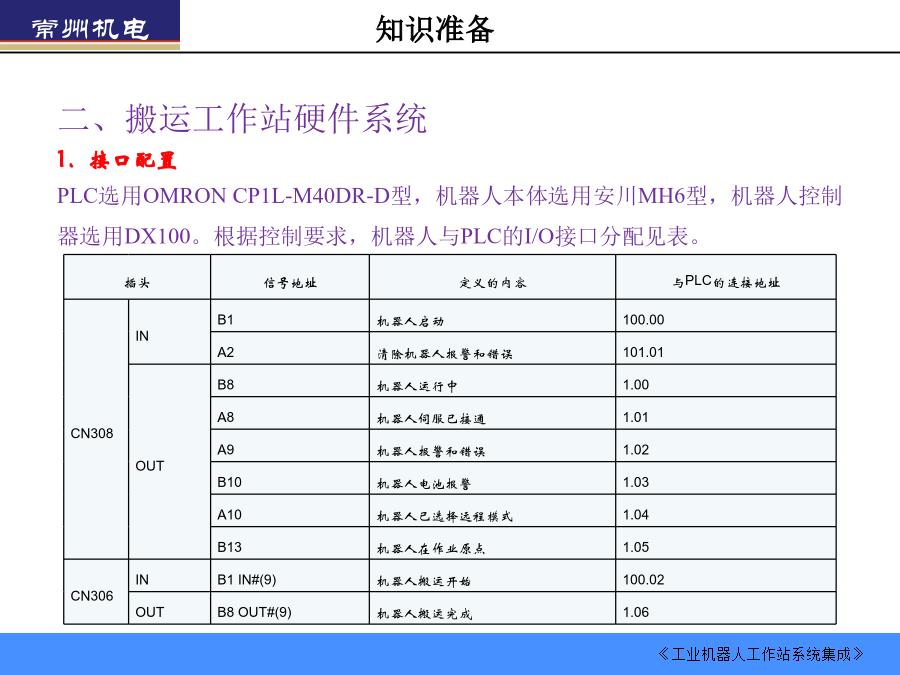
《工业机器人工作站系统集成》工作任务描述:设计工业机器人搬运工作站硬件控制系统和软件系统,并进行系统调试知识目标:1.掌握工业机器人与PLC的接口信号配置;2.掌握工业机器人远程控制的电路设计和程序编写;能力目标:1.能设计工业机器人与外围设备的接口电路;2.能设计调试PLC程序及机器人程序;3.能解决工业机器人工作站的常见故障;重点:1、工业机器人与PLC的接口信号配置2、工业机器人程序的编写难点:1、工业机器人与PLC接口电路的连接2、工业机器人外部控制的程序设计机器人搬运工作站系统在选择机器人、PL

单元五-工业机器人搬运工作站的系统设计.ppt
《工业机器人工作站系统集成》工作任务描述:设计工业机器人搬运工作站硬件控制系统和软件系统,并进行系统调试知识目标:1.掌握工业机器人与PLC的接口信号配置;2.掌握工业机器人远程控制的电路设计和程序编写;能力目标:1.能设计工业机器人与外围设备的接口电路;2.能设计调试PLC程序及机器人程序;3.能解决工业机器人工作站的常见故障;重点:1、工业机器人与PLC的接口信号配置2、工业机器人程序的编写难点:1、工业机器人与PLC接口电路的连接2、工业机器人外部控制的程序设计机器人搬运工作站系统在选择机器人、PL

单元五工业机器人搬运工作站的系统设计.ppt
《工业机器人工作站系统集成》工作任务描述:设计工业机器人搬运工作站硬件控制系统和软件系统,并进行系统调试知识目标:1.掌握工业机器人与PLC的接口信号配置;2.掌握工业机器人远程控制的电路设计和程序编写;能力目标:1.能设计工业机器人与外围设备的接口电路;2.能设计调试PLC程序及机器人程序;3.能解决工业机器人工作站的常见故障;重点:1、工业机器人与PLC的接口信号配置2、工业机器人程序的编写难点:1、工业机器人与PLC接口电路的连接2、工业机器人外部控制的程序设计机器人搬运工作站系统在选择机器人、PL

工业机器人搬运工作站系统设计_2022年学习资料.pdf

单元一-工业机器人搬运工作站的认识.ppt
《工业机器人工作站系统集成》工作任务描述:由机器人完成工件的搬运,就是将输送线输送过来的工件搬运到平面仓库中,并进行码垛。学习目标:通过本任务学习,应能:1.了解机器人搬运工作站的组成与特点。2.熟悉机器人搬运工作站外围控制系统的作用。3.熟悉工业机器人搬运工作站的工作过程。4.了解机器人末端执行器的作用与分类。搬运机器人【transferrobot】是可以进行自动化搬运作业的工业机器人。最早的搬运机器人出现在1960年的美国,Versatran和Unimate两种机器人首次用于搬运作业。搬运作业是指用一