
主臂伸缩可变构型式越障机构.pdf

一只****生物


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

主臂伸缩可变构型式越障机构.pdf
本发明的目的在于提供主臂伸缩可变构型式越障机构,包括主臂、行星轮、主臂驱动电机、辅助臂、辅助支撑轮、辅助臂驱动电机、第一驱动轮、第二驱动轮、第一驱动轮驱动电机、履带、履带架,行星轮安装在主臂上,主臂通过主臂驱动电机连接履带架,第一驱动轮、第二驱动轮安装在履带架的两端,辅助支撑轮安装在辅助臂上,辅助臂通过辅助臂驱动电机连接履带架,辅助臂驱动电机还连接第二驱动轮,第一驱动轮驱动电机连接第一驱动轮,履带缠在行星轮、第一驱动轮和第二驱动轮上。本发明通过不同控制模块的植入可以实现不同的功能应用,可开发性高、应用前景

双棘轮式可伸缩的越障支臂及越障机器人.pdf
本发明公开了一种双棘轮式可伸缩的越障支臂及越障机器人,其中双棘轮式可伸缩的越障支臂包括间隙配合的伸缩支臂与支臂体;支臂体上固定有后行走轮,后行走轮的轴向串联有动力输出轴;伸缩支臂上固定前行走轮,前行走轮的轴向串联有传动轴;越障履带套合在后行走轮和前行走轮上;支臂体上固定有涨紧轮机构;支臂体上靠近伸缩支臂一端固定有双棘轮机构;双棘轮机构在电机编码器的控制下,带动齿条左右运动;齿条一端与伸缩支臂相连,另一端与凸轮相连;凸轮与涨紧轮机构相切配合;齿条左右运动带动凸轮左右运动和伸缩支臂伸缩滑动;凸轮运动使得涨紧轮
双丝杠结构可伸缩的越障支臂及越障机器人.pdf
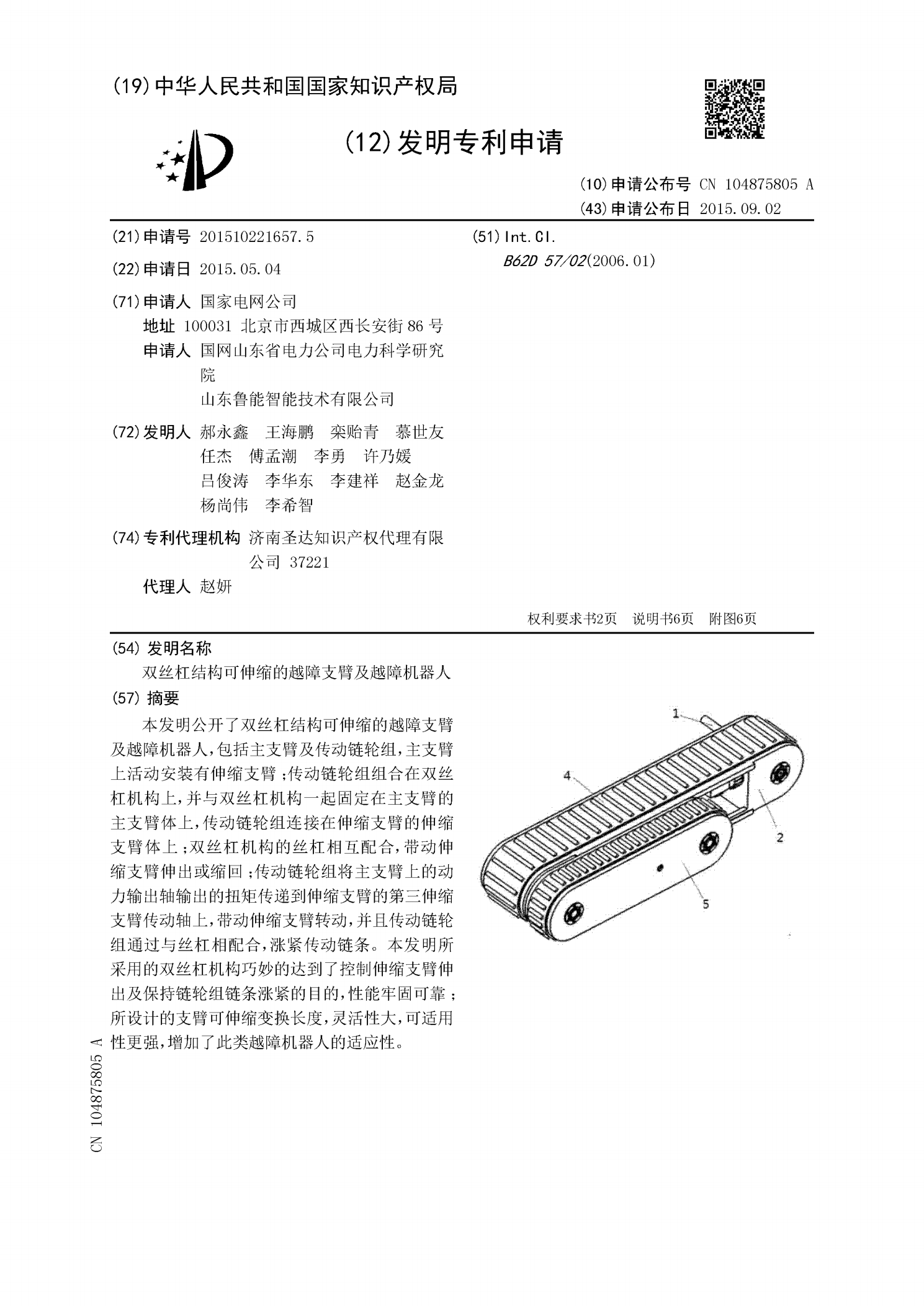
本发明公开了双丝杠结构可伸缩的越障支臂及越障机器人,包括主支臂及传动链轮组,主支臂上活动安装有伸缩支臂;传动链轮组组合在双丝杠机构上,并与双丝杠机构一起固定在主支臂的主支臂体上,传动链轮组连接在伸缩支臂的伸缩支臂体上;双丝杠机构的丝杠相互配合,带动伸缩支臂伸出或缩回;传动链轮组将主支臂上的动力输出轴输出的扭矩传递到伸缩支臂的第三伸缩支臂传动轴上,带动伸缩支臂转动,并且传动链轮组通过与丝杠相配合,涨紧传动链条。本发明所采用的双丝杠机构巧妙的达到了控制伸缩支臂伸出及保持链轮组链条涨紧的目的,性能牢固可靠;所设
双向伸缩臂机构.pdf
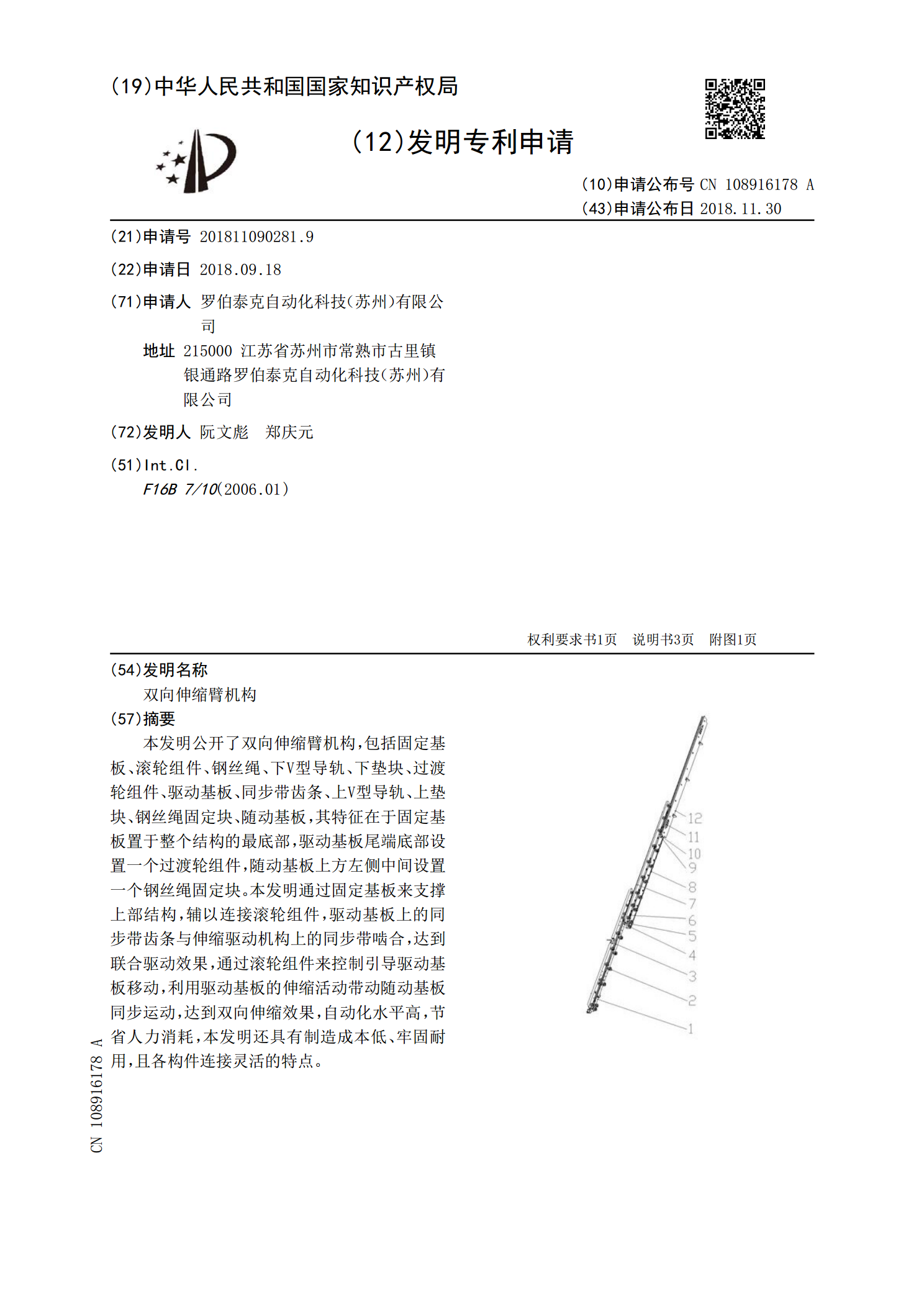
本发明公开了双向伸缩臂机构,包括固定基板、滚轮组件、钢丝绳、下V型导轨、下垫块、过渡轮组件、驱动基板、同步带齿条、上V型导轨、上垫块、钢丝绳固定块、随动基板,其特征在于固定基板置于整个结构的最底部,驱动基板尾端底部设置一个过渡轮组件,随动基板上方左侧中间设置一个钢丝绳固定块。本发明通过固定基板来支撑上部结构,辅以连接滚轮组件,驱动基板上的同步带齿条与伸缩驱动机构上的同步带啮合,达到联合驱动效果,通过滚轮组件来控制引导驱动基板移动,利用驱动基板的伸缩活动带动随动基板同步运动,达到双向伸缩效果,自动化水平高,

多爪伸缩轮越障机构及其控制机构.pdf
本发明多爪伸缩轮越障机构及其控制机构,属于移动越障机器人行走机构领域;解决的问题是提供一种伸缩与转动结构简洁的越障机构及其控制机构;采用的技术方案:丝杠的一端固定有小圆锥齿轮,丝杠的另一端伸入圆套筒内,圆套筒的中部开有轴向长孔作为导向槽;圆套筒靠近小圆锥齿轮的一端固定有大圆锥齿轮,圆套筒的另一端固定有固定轮盘,圆套筒的中部活动套装有活动轮盘;丝杠的丝杠螺母上固定有滑块,滑块通过滑块螺栓与活动轮盘连接;活动轮盘的周向均布铰接有至少三个伸缩腿,固定轮盘的周向均布铰接有与伸缩腿一一对应的支撑腿,每个支撑腿均与和