
尺蠖式机器人机构设计与运动学分析.ppt

努力****南绿

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共67页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

尺蠖式机器人机构设计与运动学分析.ppt
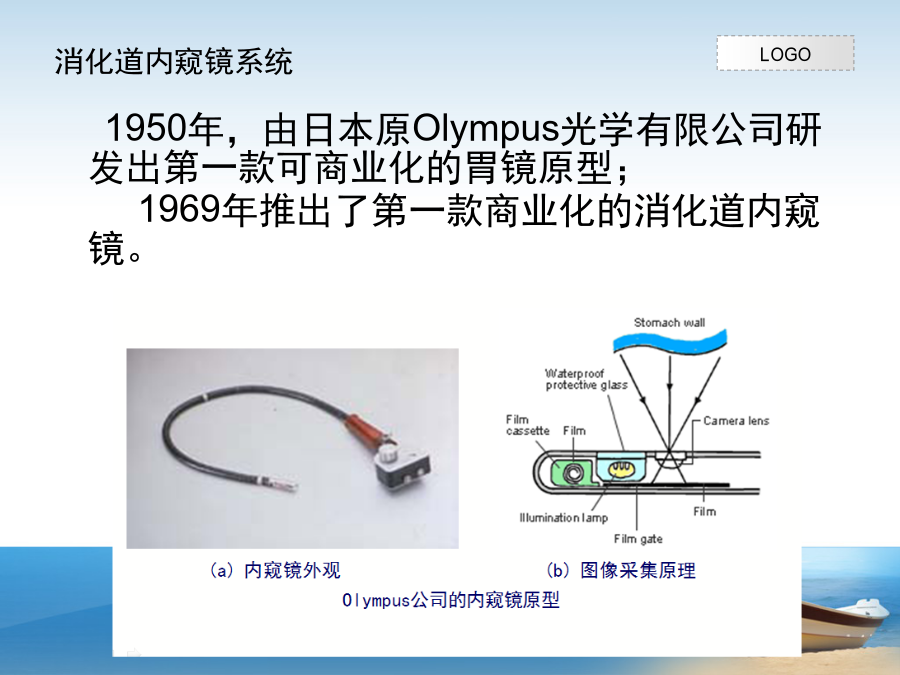
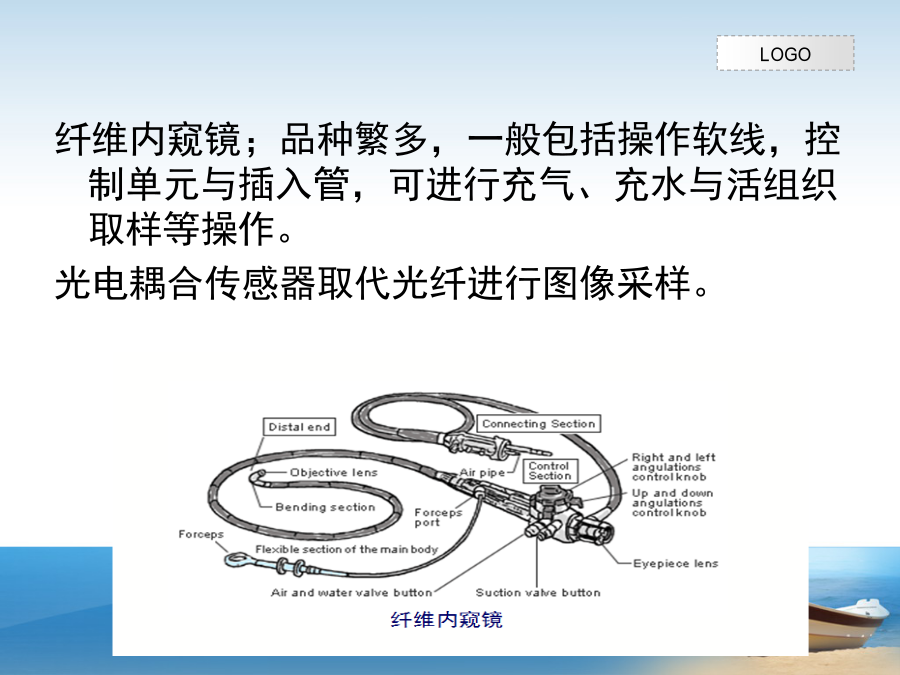
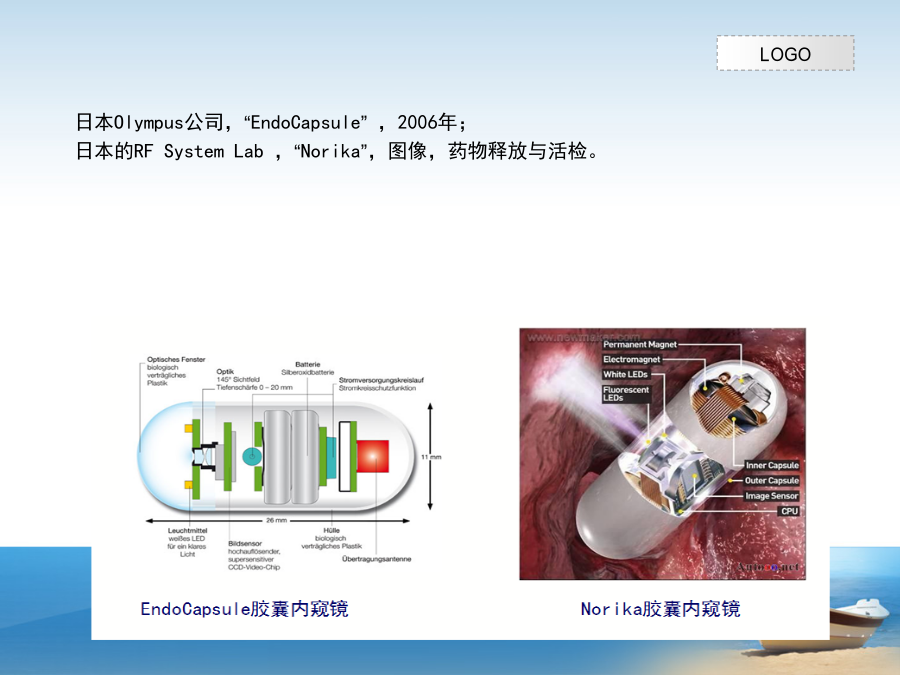
尺蠖式机器人机构设计与运动学分析———李晓阳机器人的定义爬行机器人的分类微胃肠道疾病诊疗机器人系统的研究背景消化道内窥镜系统传统内窥镜的优缺点被动式胶囊内窥镜系统被动式胶囊内窥镜的优缺点微型尺蠖式胃肠道疾病诊疗机器人核心问题尺蠖尺蠖式爬行机器人的原理仿尺蠖式机器人仿尺蠖式机器人仿尺蠖式机器人仿尺蠖式机器人尺蠖运动特点尺蠖式肠道机器人的驱动方式形状记忆合金式驱动分析电磁驱动方式气动式驱动方式压电材料微型电机驱动方式GHM1770010033E直流齿轮组微型电机仿尺蠖式运动机构设计结肠微型机器人应具备以下特性

尺蠖式机器人机构设计与运动学分析ppt课件.ppt
尺蠖式机器人机构设计与运动学分析———李晓阳机器人的定义爬行机器人的分类微胃肠道疾病诊疗机器人系统的研究背景消化道内窥镜系统传统内窥镜的优缺点被动式胶囊内窥镜系统被动式胶囊内窥镜的优缺点微型尺蠖式胃肠道疾病诊疗机器人核心问题尺蠖尺蠖式爬行机器人的原理仿尺蠖式机器人仿尺蠖式机器人仿尺蠖式机器人仿尺蠖式机器人尺蠖运动特点尺蠖式肠道机器人的驱动方式形状记忆合金式驱动分析电磁驱动方式气动式驱动方式压电材料微型电机驱动方式GHM1770010033E直流齿轮组微型电机仿尺蠖式运动机构设计结肠微型机器人应具备以下特性

工业码垛机器人的机构设计与运动学分析.docx
工业码垛机器人的机构设计与运动学分析工业码垛机器人的机构设计与运动学分析随着工业自动化的发展,越来越多的企业开始使用工业机器人来提升生产效率和品质。其中,码垛机器人是用于将物品按照一定规律码放在特定位置的机器人,广泛应用于物流、仓储、食品、医药等行业。本文主要就码垛机器人的机构设计和运动学分析进行探讨。一、机构设计码垛机器人的机构设计主要包括机械臂、夹具和控制系统。机械臂作为机器人的核心,其设计关键包括结构、材料、电机和传动系统等。1.结构设计码垛机器人的机械臂通常采用多自由度机械臂结构。机械臂的自由度数
自胀式尺蠖机器人.pdf
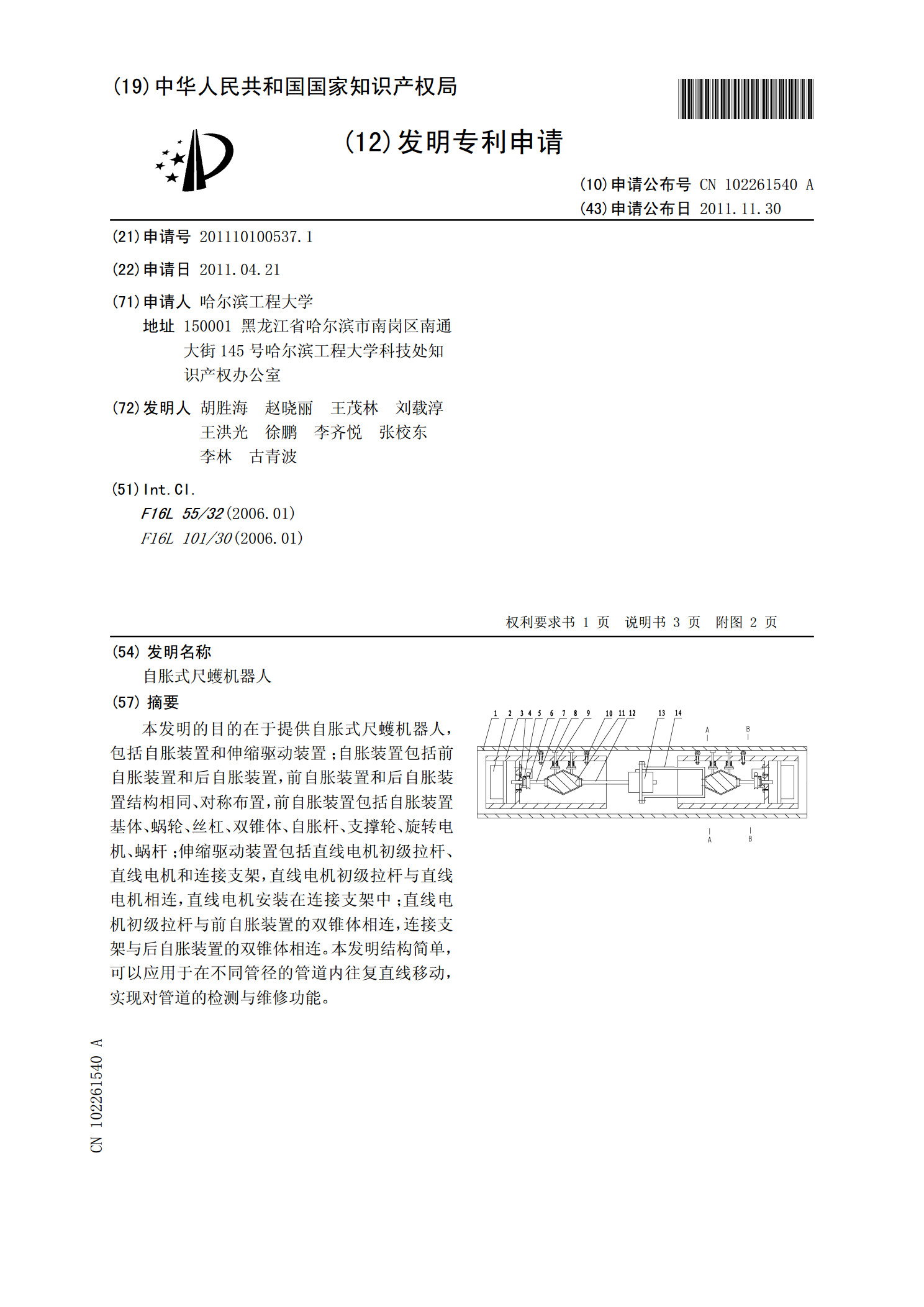
本发明的目的在于提供自胀式尺蠖机器人,包括自胀装置和伸缩驱动装置;自胀装置包括前自胀装置和后自胀装置,前自胀装置和后自胀装置结构相同、对称布置,前自胀装置包括自胀装置基体、蜗轮、丝杠、双锥体、自胀杆、支撑轮、旋转电机、蜗杆;伸缩驱动装置包括直线电机初级拉杆、直线电机和连接支架,直线电机初级拉杆与直线电机相连,直线电机安装在连接支架中;直线电机初级拉杆与前自胀装置的双锥体相连,连接支架与后自胀装置的双锥体相连。本发明结构简单,可以应用于在不同管径的管道内往复直线移动,实现对管道的检测与维修功能。

轮履复合机器人行走机构的设计及运动学分析.docx
轮履复合机器人行走机构的设计及运动学分析在当前工业自动化领域,机器人技术的发展已经取得了长足的进步,其中无人操控式智能机器人成为了越来越受到关注的技术方向。在这样的背景下,新型轮履复合机器人逐渐成为了研究的热点。本文旨在探讨轮履复合机器人行走机构的设计及运动学分析。一、轮履复合机器人的概念及特点轮履复合机器人(Wheel-LegHybridRobots,WLHR)是一种融合了轮式和腿式行走机构的新型机器人。既可以利用轮子靠滚动的方式快速地穿梭于平坦的路面上,也可以利用多段式腿部来克服复杂地形条件下的行走障