
典型机电一体化系统资料.ppt

YY****。。


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共55页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

典型机电一体化系统资料.pptx
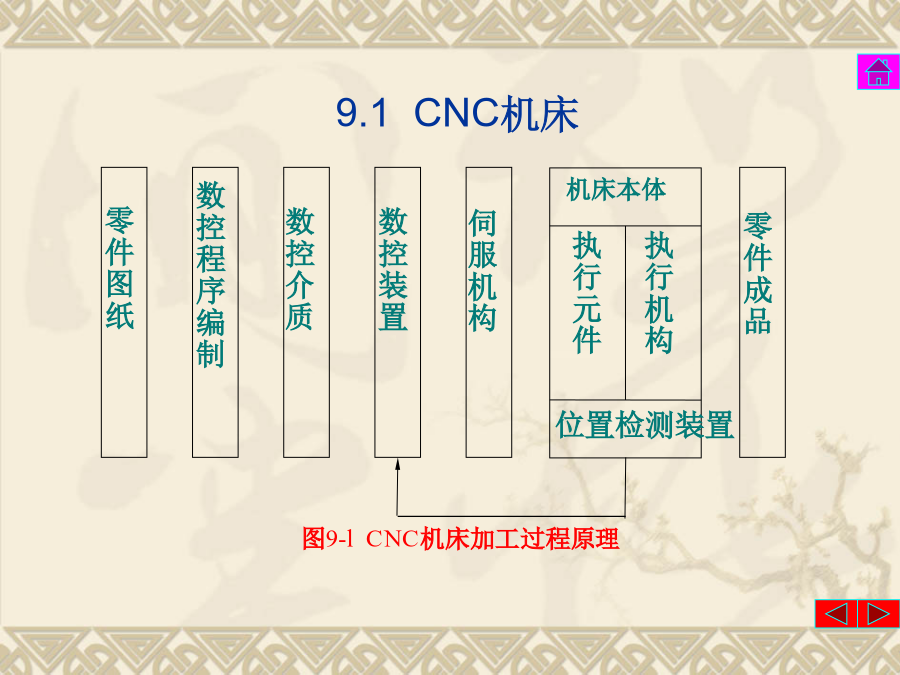
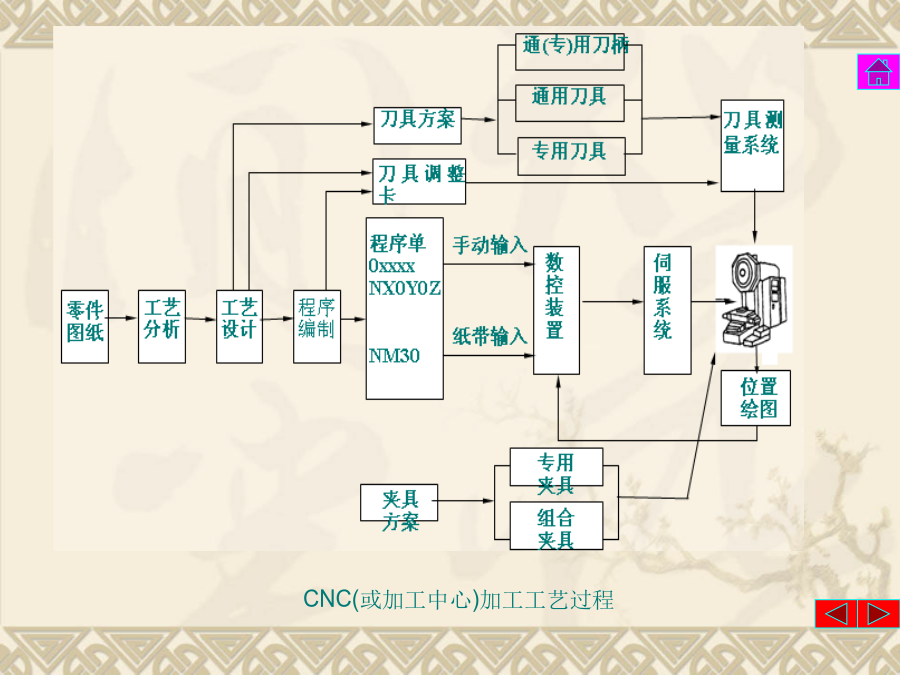
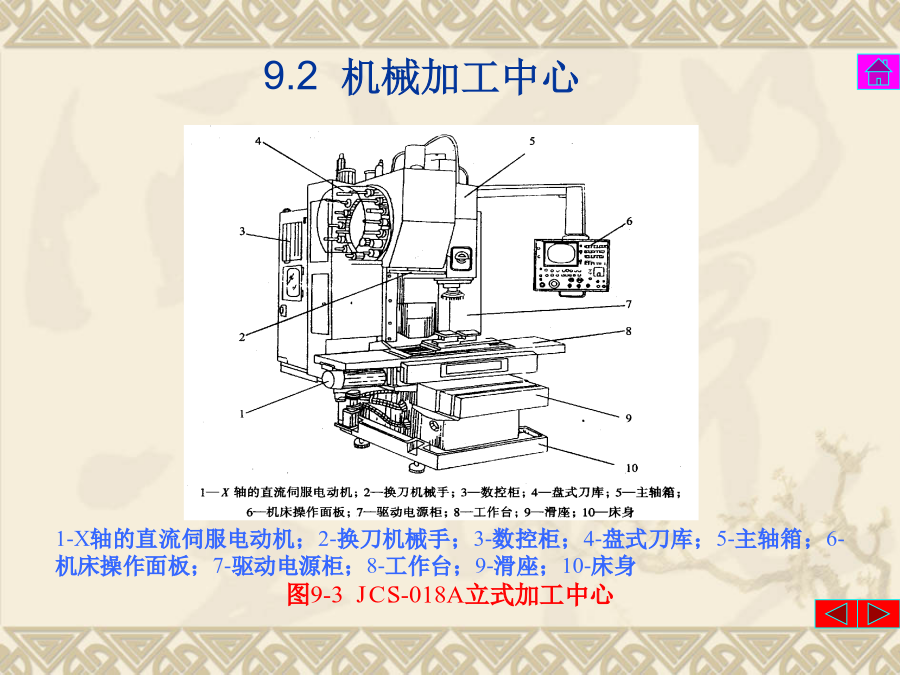
会计学9.1CNC机床CNC(或加工中心)加工工艺过程9.2机械加工中心加工中心的技术发展方向:⑴高精、高速、高效的加工⑵高可靠性⑶加强标准化和开放性⑷网络数控⑸智能化9.3工业机器人二、工业机器人系统结构工业机器人的组成三、工业机器人的分类圆柱坐标系机器人仿人关节型机器人SCARA型机器人(d)直角坐标型工业机器人的坐标系PUMA机器人的坐标系四、工业机器人的主要技术参数机器人的工作空间五、工业机器人的控制六、工业机器人的机械结构如图所示:手臂伸缩运动由液压缸2驱动,手臂回转运动采用摆动液压马达11驱动

典型机电一体化系统资料.ppt
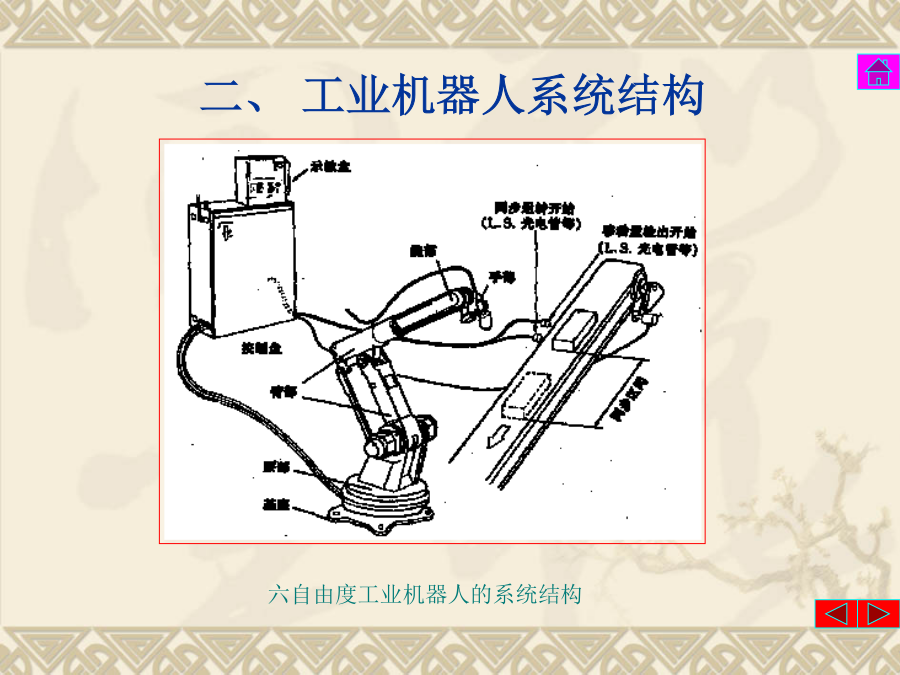
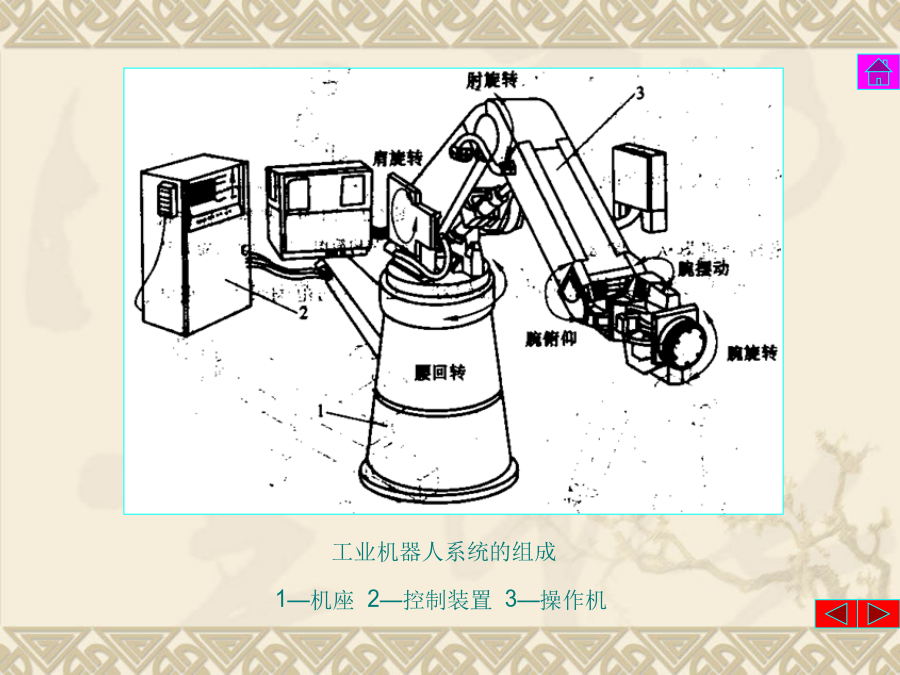
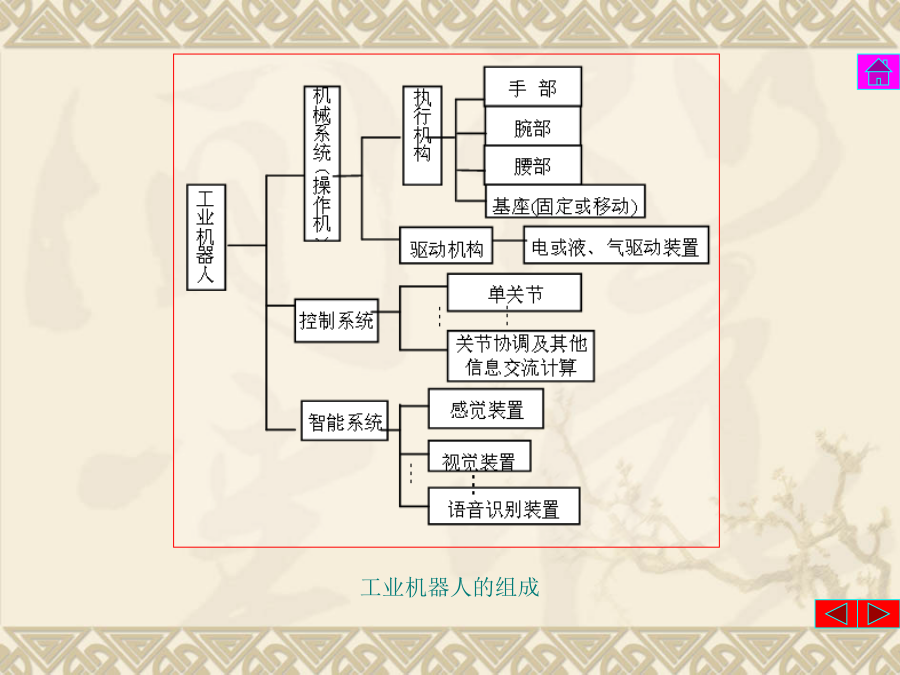
第九章典型机电一体化系统9.1CNC机床CNC(或加工中心)加工工艺过程9.2机械加工中心加工中心的技术发展方向:⑴高精、高速、高效的加工⑵高可靠性⑶加强标准化和开放性⑷网络数控⑸智能化9.3工业机器人二、工业机器人系统结构工业机器人系统的组成工业机器人的组成三、工业机器人的分类圆柱坐标系机器人直角坐标型机器人仿人关节型机器人SCARA型机器人(d)直角坐标型工业机器人的坐标系PUMA机器人的坐标系四、工业机器人的主要技术参数机器人的工作空间五、工业机器人的控制六、工业机器人的机械结构如图所示:手臂伸缩运

典型的机电一体化系统.ppt
第九章典型的机电一体化系统9.1CNC机床CNC(或加工中心)加工工艺过程9.2机械加工中心加工中心的技术发展方向:⑴高精、高速、高效的加工⑵高可靠性⑶加强标准化和开放性⑷网络数控⑸智能化9.3工业机器人二、工业机器人系统结构工业机器人的组成三、工业机器人的分类圆柱坐标系机器人仿人关节型机器人SCARA型机器人(d)直角坐标型工业机器人的坐标系PUMA机器人的坐标系四、工业机器人的主要技术参数机器人的工作空间五、工业机器人的控制六、工业机器人的机械结构如图所示:手臂伸缩运动由液压缸2驱动,手臂回转运动采用
-机电一体化系统典型机构.ppt
机械系统是机电一体化系统的最基本要素,是由计算机协调与控制的,用于完成包括机械力、运动和能量流等动力学任务的机械及机电部件相互联系的系统。机械系统包括传动部件、导向支撑结构和执行机构等,用于完成传递功率、运动和完成指定的动作。第四章机械系统设计4.1机电一体化系统典型机构4.1.1基本概念与术语空间物体的自由度(独立运动的数目)自由度和约束(构件独立运动所加的限制)运动副运动副的分类常见平面运动副及其自由度移动副(低副)(自由度为1)可以沿导路移动高副复合运动副:万向铰或虎克铰4.1.2机构设计基础机架:
《机电一体化系统设计》复习资料资料.pdf
<5021>《机电一体化系统设计》【考试形式】书面闭卷考(学生需要自带2B铅笔,填涂答题卡)【考试时间】90分钟【考试题型】1、选择题(每题2分,共30分)2、判断题(每题2分,共20分)3、填空题(每题2分,共16分)4、简答题(每题8分,共24分)5、计算题(每题10分,共10分)【考试题库】、选择题(考15题,一共30分)1.以下产品不属于机电一体化产品的是(D)。A.工业机器人B.打印机C.空调D.电子计算机2.STD总线属于什么接口类型?(AA.智能接口B.无源接口C.有源接口D.零接口3.RS