
用于手部功能障碍患者自主康复训练的肌电假手.pdf

萌运****魔王

1/7

2/7
3/7

4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

用于手部功能障碍患者自主康复训练的肌电假手.pdf
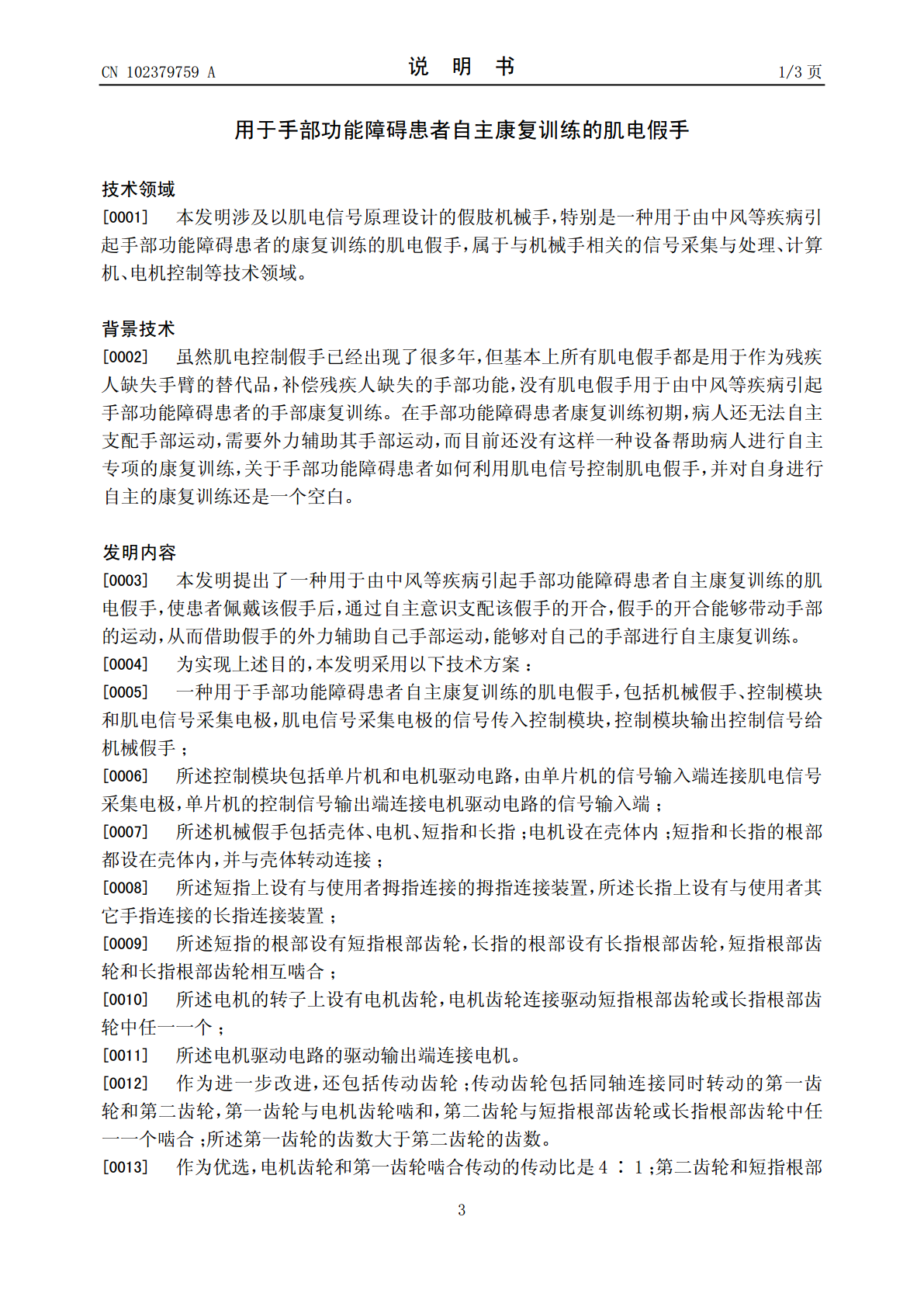
一种用于手部功能障碍患者自主康复训练的肌电假手,机械假手由微型直流电机通过齿轮传动机构带动用于辅助患者手部运动的手指。其特征在于:设置两个肌电信号采集电极贴合在患者手臂的肌电信号较为活跃的区域,分别采集代表手指张开及闭合肌电信号,把这两个肌电信号输入至设有包括单片机、电机驱动电路在内的控制模块,由单片机输出假手的开合信号,通过电机驱动电路驱动微型直流电机正转或者反转,通过齿轮传动机构使假手闭合或者张开,从而带动患者的手部做张开和闭合的运动。

一种基于阵列肌电的卒中患者手部康复训练动作识别方法.pdf
本发明公开了一种基于阵列肌电的卒中患者手部康复训练动作识别方法,本发明应用阵列型肌电传感器采集患者训练过程前臂的肌电序列数据,保留肌肉在物理空间上的协同信息和肌肉活动随时间变化的信息;建立并行卷积神经网络自动提取不同时刻肌电数据的空间特征;建立长短期记忆网络自动学习肌电的时间依赖特征。融合肌电时空特征后进行分类识别,以避免人工特征工程导致的信息冗余或丢失,可以有效提高手部动作识别精度。
一种偏瘫患者的手部自主康复训练系统及训练方法.pdf
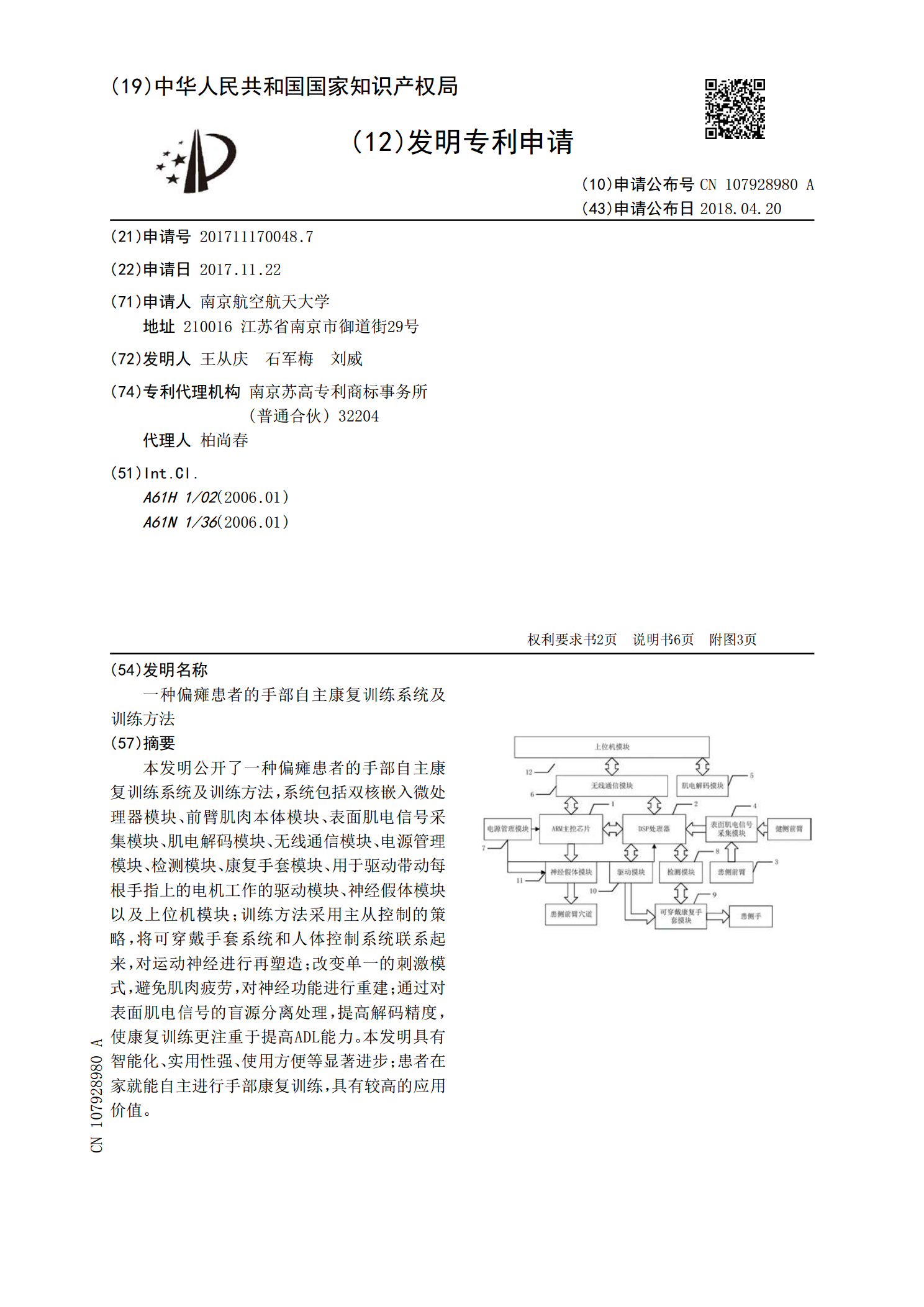
本发明公开了一种偏瘫患者的手部自主康复训练系统及训练方法,系统包括双核嵌入微处理器模块、前臂肌肉本体模块、表面肌电信号采集模块、肌电解码模块、无线通信模块、电源管理模块、检测模块、康复手套模块、用于驱动带动每根手指上的电机工作的驱动模块、神经假体模块以及上位机模块;训练方法采用主从控制的策略,将可穿戴手套系统和人体控制系统联系起来,对运动神经进行再塑造;改变单一的刺激模式,避免肌肉疲劳,对神经功能进行重建;通过对表面肌电信号的盲源分离处理,提高解码精度,使康复训练更注重于提高ADL能力。本发明具有智能化、
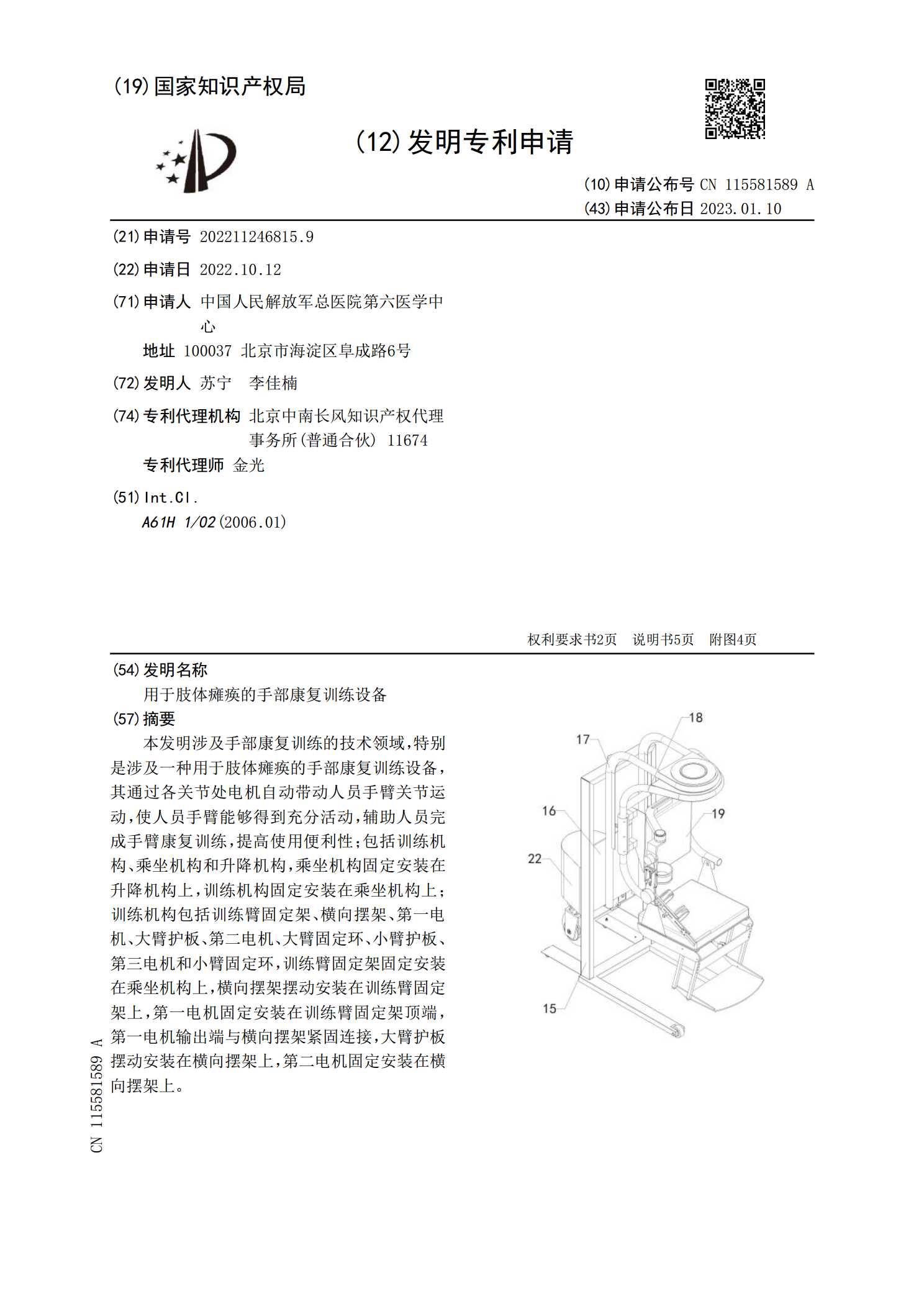
用于肢体瘫痪的手部康复训练设备.pdf
本发明涉及手部康复训练的技术领域,特别是涉及一种用于肢体瘫痪的手部康复训练设备,其通过各关节处电机自动带动人员手臂关节运动,使人员手臂能够得到充分活动,辅助人员完成手臂康复训练,提高使用便利性;包括训练机构、乘坐机构和升降机构,乘坐机构固定安装在升降机构上,训练机构固定安装在乘坐机构上;训练机构包括训练臂固定架、横向摆架、第一电机、大臂护板、第二电机、大臂固定环、小臂护板、第三电机和小臂固定环,训练臂固定架固定安装在乘坐机构上,横向摆架摆动安装在训练臂固定架上,第一电机固定安装在训练臂固定架顶端,第一电机

对脑卒中患者吞咽功能障碍康复训练的效果观察.doc
郑州大学现代远程教育毕业论文题目:对脑卒中患者吞咽功能障碍康复训练的效果观察入学年月_2011年9月___姓名___陈欣欣学号_11091226028专业__基础医学学习中心__山西运城学习中心指导教师_______完成时间_2014_年_1_月__10__日目录前言---------------------------------------------------------41临床资料-------------------------------------------