
一种智能轮椅多模态控制系统.pdf

Ke****67

1/7

2/7
3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种智能轮椅多模态控制系统.pdf
本发明及一种智能轮椅多模态控制系统,该控制系统可实现多种控制方式的任意选用,方便不同类型的行动不便着使用。该系统由机械结构部分、人机交互部分、环境感知部分、语音控制中可避障部分、自主避障部分、驱动部分组成,并设计了语音控制中避障,自主避障,手动控制等富有特色的交互方式,一般在每个系统中都是几种方式共存,以便根据环境、用户身体状况来选择合适的接口。它有两种控制方式,手柄控制和键盘控制。轮椅本身配有电机控制器,通过对直流电机的开环控制控制轮椅的前进、后退、加速、减速、左转、右转、停止等运动控制。
一种嵌入式多模态交互智能轮椅控制系统.pdf
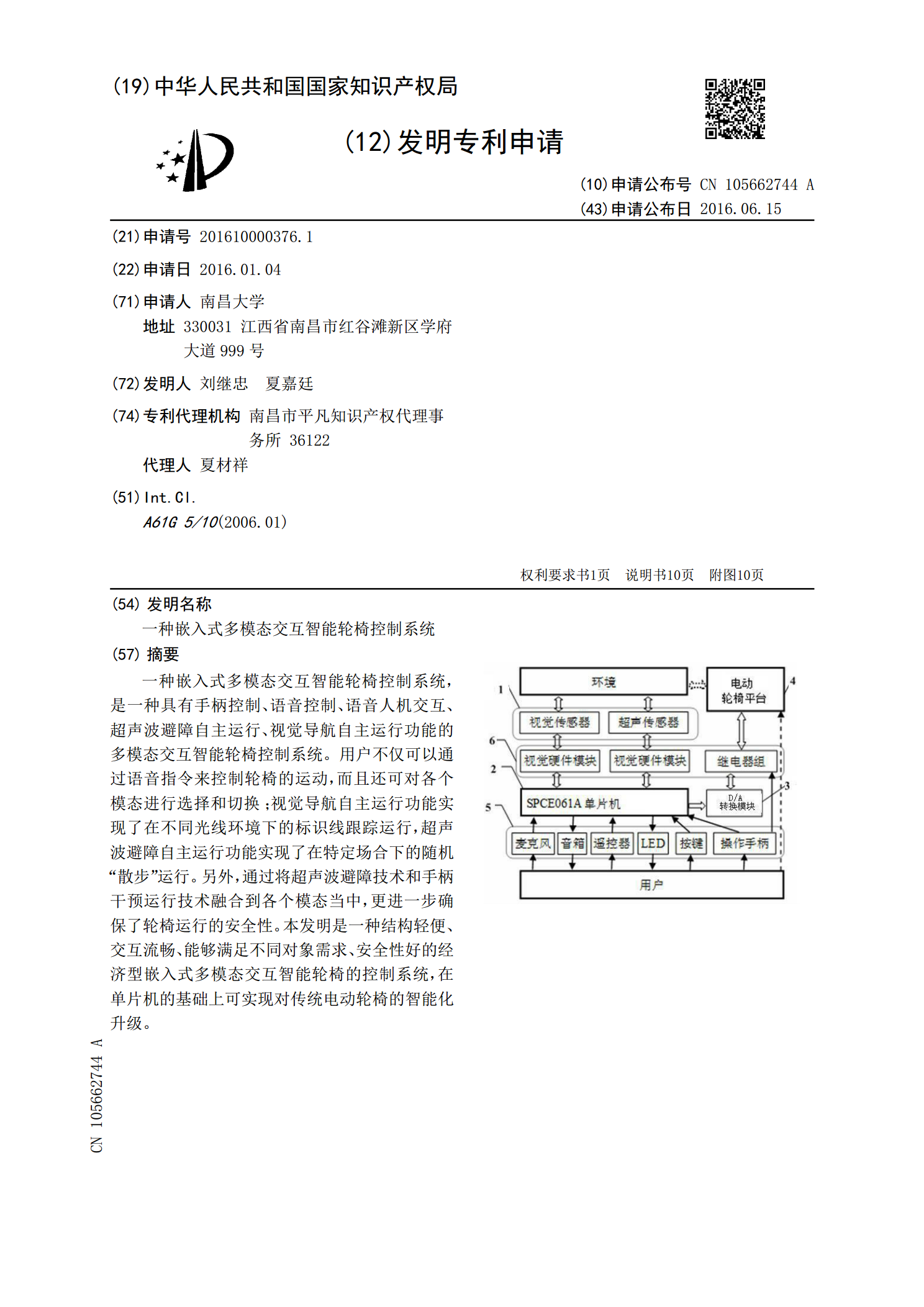
一种嵌入式多模态交互智能轮椅控制系统,是一种具有手柄控制、语音控制、语音人机交互、超声波避障自主运行、视觉导航自主运行功能的多模态交互智能轮椅控制系统。用户不仅可以通过语音指令来控制轮椅的运动,而且还可对各个模态进行选择和切换;视觉导航自主运行功能实现了在不同光线环境下的标识线跟踪运行,超声波避障自主运行功能实现了在特定场合下的随机“散步”运行。另外,通过将超声波避障技术和手柄干预运行技术融合到各个模态当中,更进一步确保了轮椅运行的安全性。本发明是一种结构轻便、交互流畅、能够满足不同对象需求、安全性好的经
一种基于多模态控制的智能轮椅.pdf
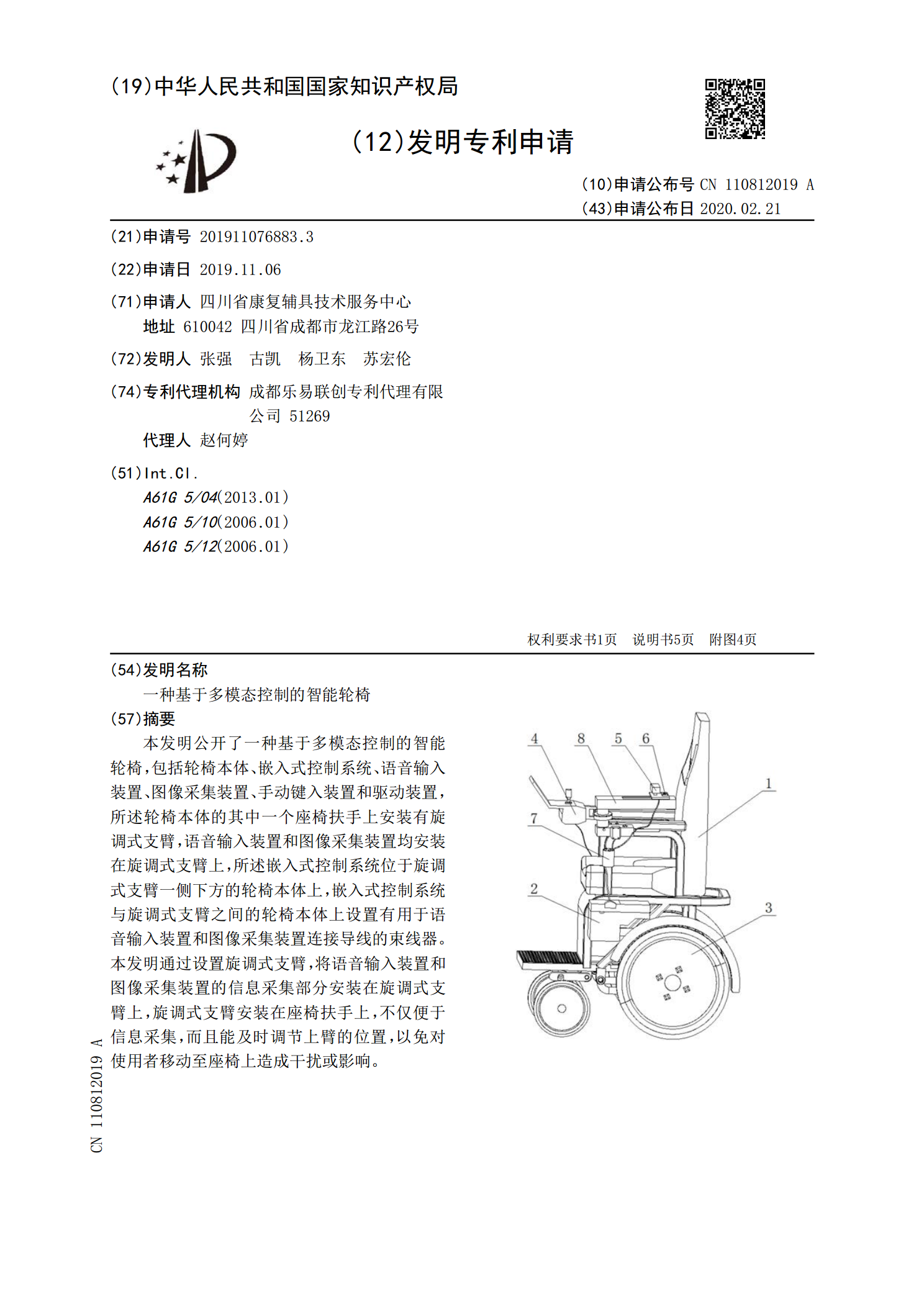
本发明公开了一种基于多模态控制的智能轮椅,包括轮椅本体、嵌入式控制系统、语音输入装置、图像采集装置、手动键入装置和驱动装置,所述轮椅本体的其中一个座椅扶手上安装有旋调式支臂,语音输入装置和图像采集装置均安装在旋调式支臂上,所述嵌入式控制系统位于旋调式支臂一侧下方的轮椅本体上,嵌入式控制系统与旋调式支臂之间的轮椅本体上设置有用于语音输入装置和图像采集装置连接导线的束线器。本发明通过设置旋调式支臂,将语音输入装置和图像采集装置的信息采集部分安装在旋调式支臂上,旋调式支臂安装在座椅扶手上,不仅便于信息采集,而且

智能轮椅多模态控制系统研究的任务书.docx
智能轮椅多模态控制系统研究的任务书任务书一、研究背景随着社会的发展,人们对于残障人士的重视程度不断提高,对于残障人士的生活质量也在不断的追求。智能轮椅可以作为残障人士的重要工具之一,为他们提供更加便捷、高效、安全的移动方式。然而,传统的手动轮椅存在着许多不足之处,如相对较低的运动效率、有限的适应性等问题。为了解决这些问题,需要对智能轮椅的多模态控制系统进行深入研究,以提高智能轮椅的使用效率和便利性。二、研究目标本研究的目标是设计并实现一个智能轮椅多模态控制系统,能够提供多种控制方式,包括人体姿态控制、语音
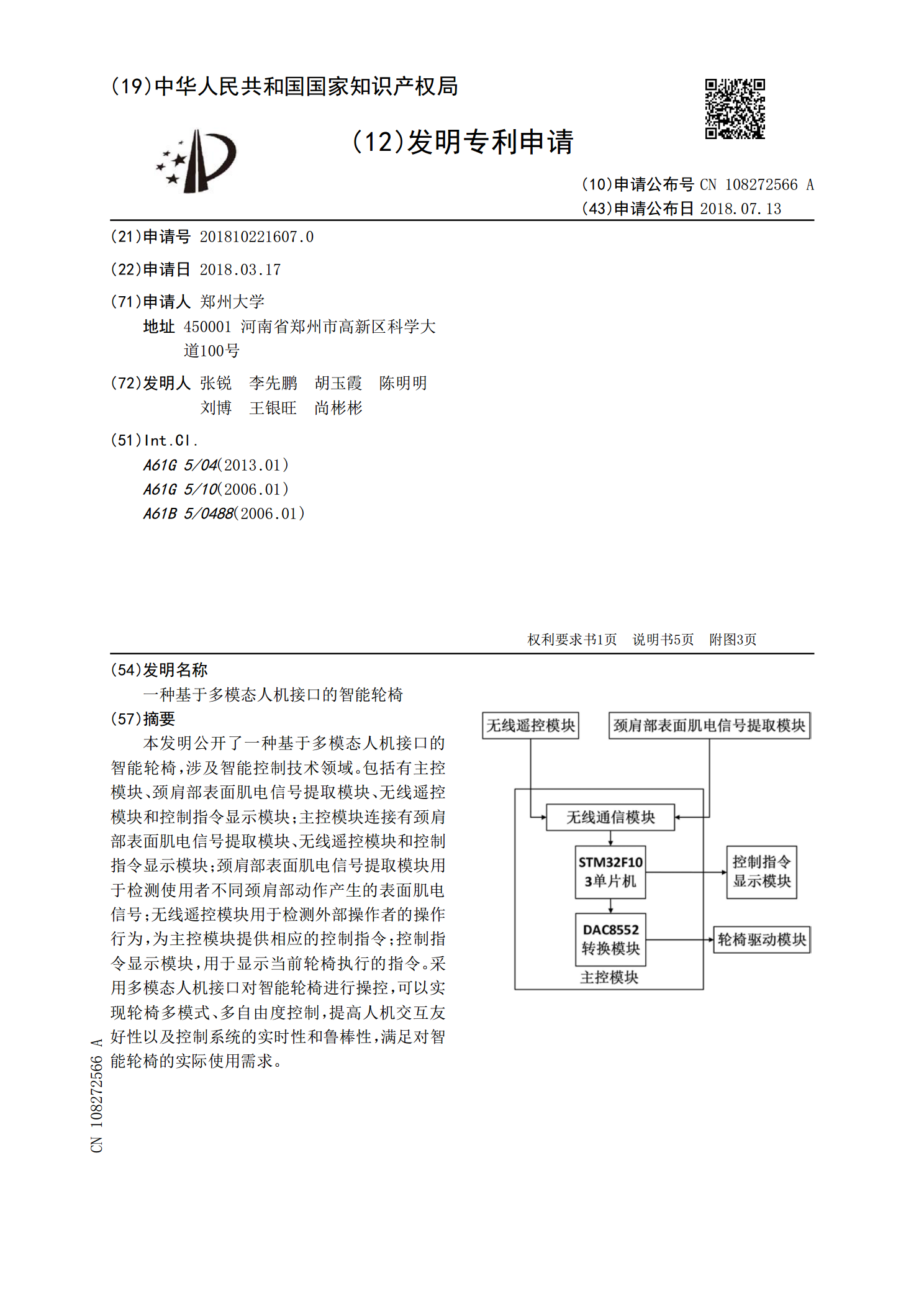
一种基于多模态人机接口的智能轮椅.pdf
本发明公开了一种基于多模态人机接口的智能轮椅,涉及智能控制技术领域。包括有主控模块、颈肩部表面肌电信号提取模块、无线遥控模块和控制指令显示模块;主控模块连接有颈肩部表面肌电信号提取模块、无线遥控模块和控制指令显示模块;颈肩部表面肌电信号提取模块用于检测使用者不同颈肩部动作产生的表面肌电信号;无线遥控模块用于检测外部操作者的操作行为,为主控模块提供相应的控制指令;控制指令显示模块,用于显示当前轮椅执行的指令。采用多模态人机接口对智能轮椅进行操控,可以实现轮椅多模式、多自由度控制,提高人机交互友好性以及控制系