
一种基于多模态人机接口的智能轮椅.pdf

琰琬****买买

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于多模态人机接口的智能轮椅.pdf
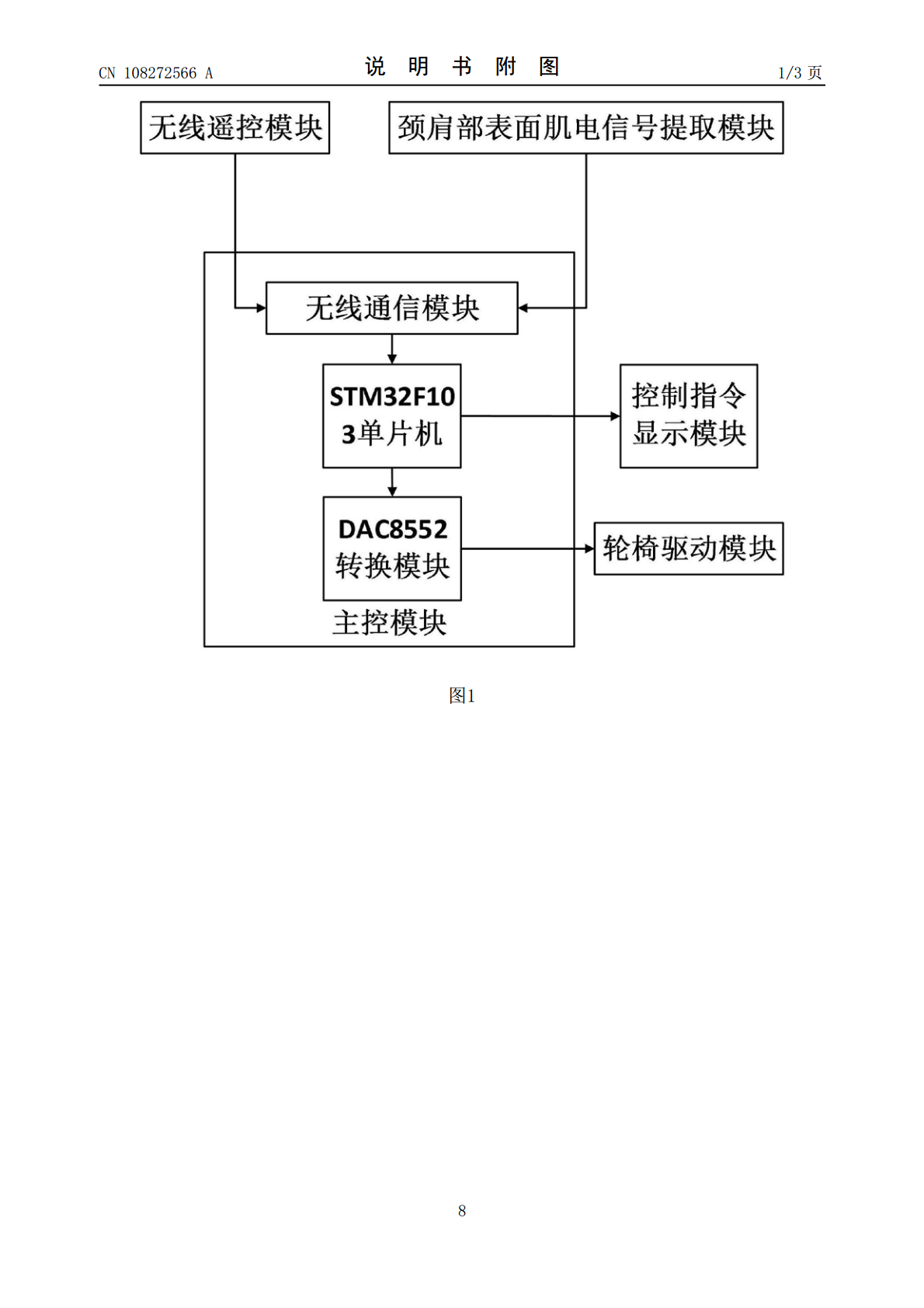
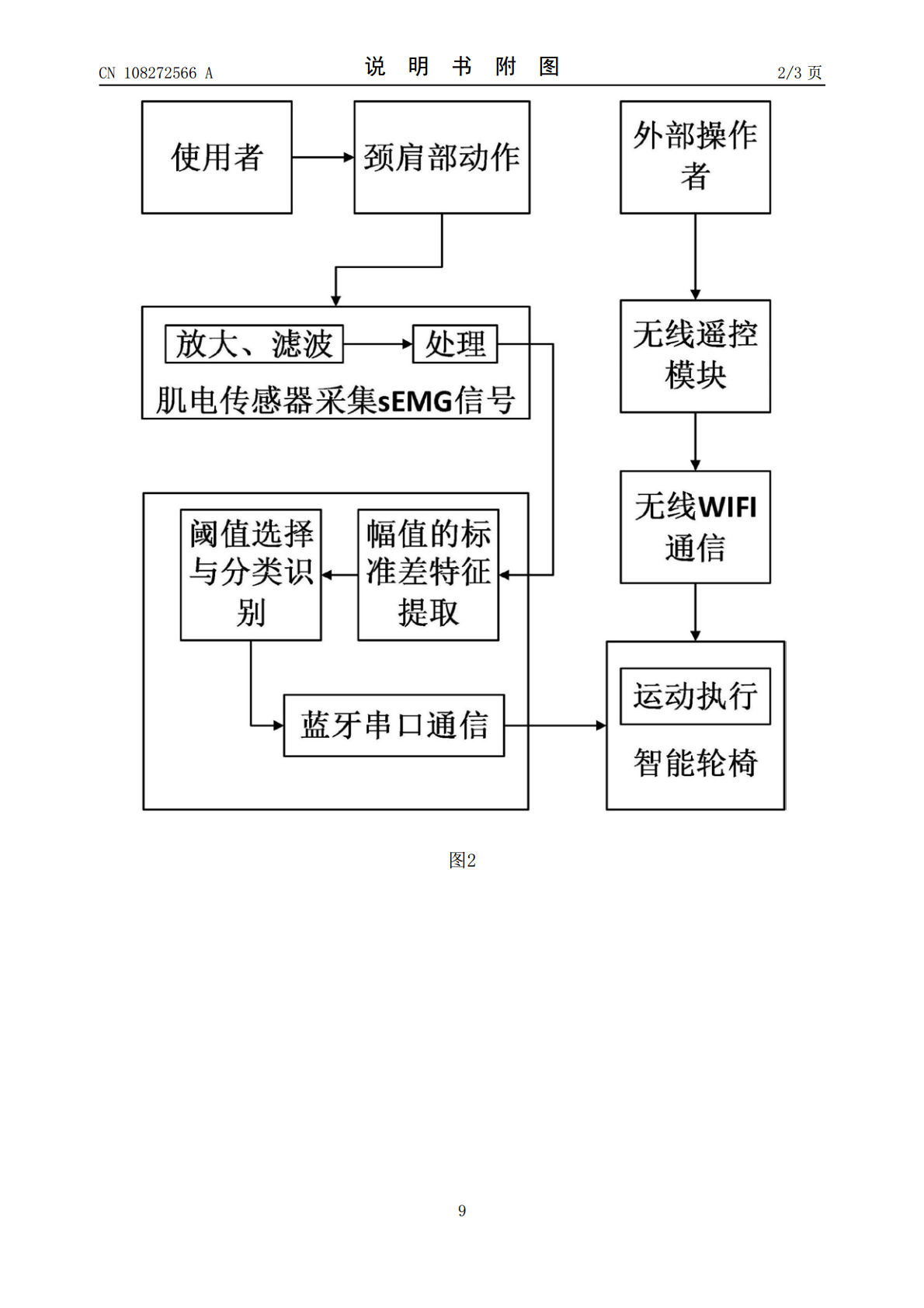
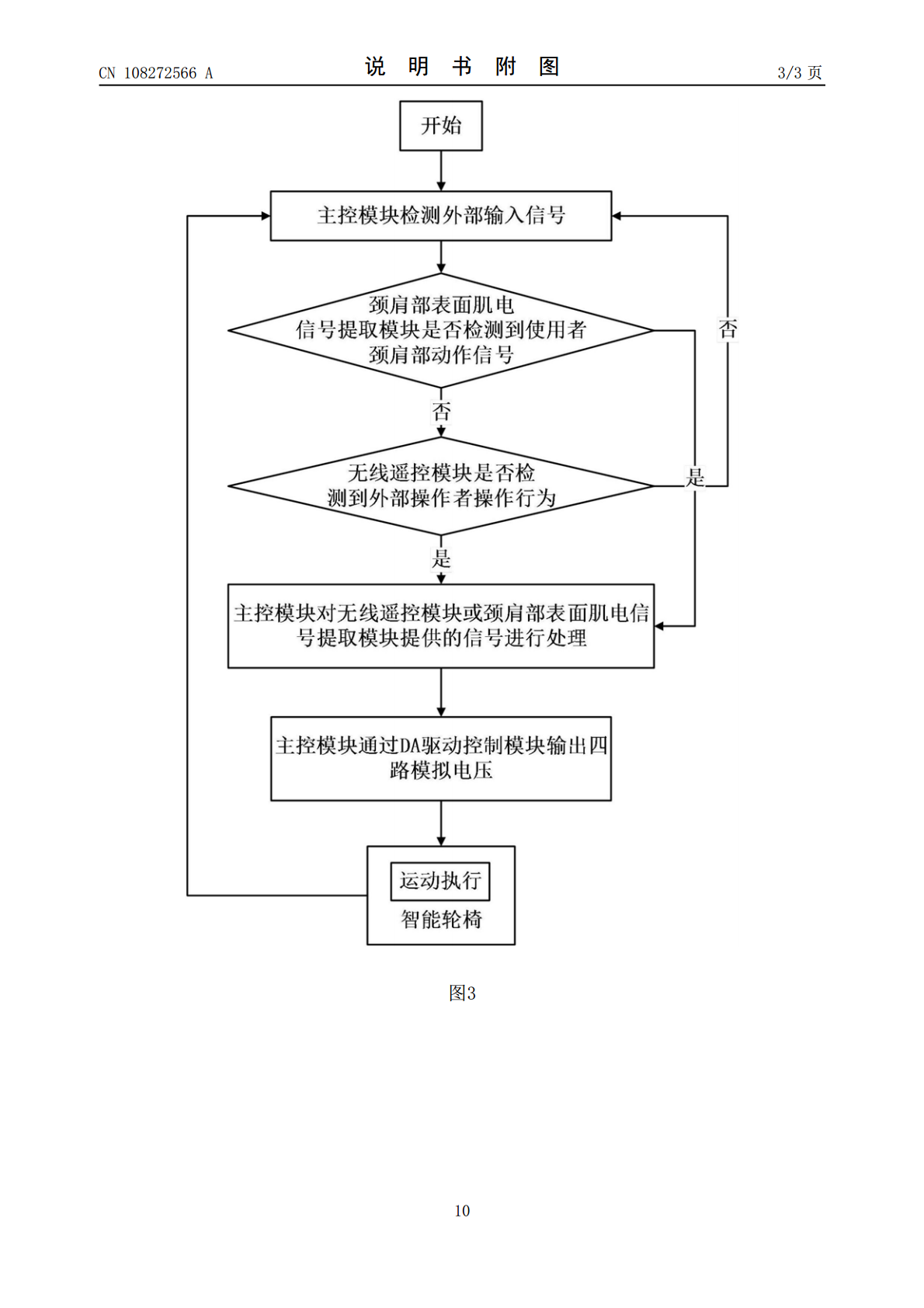
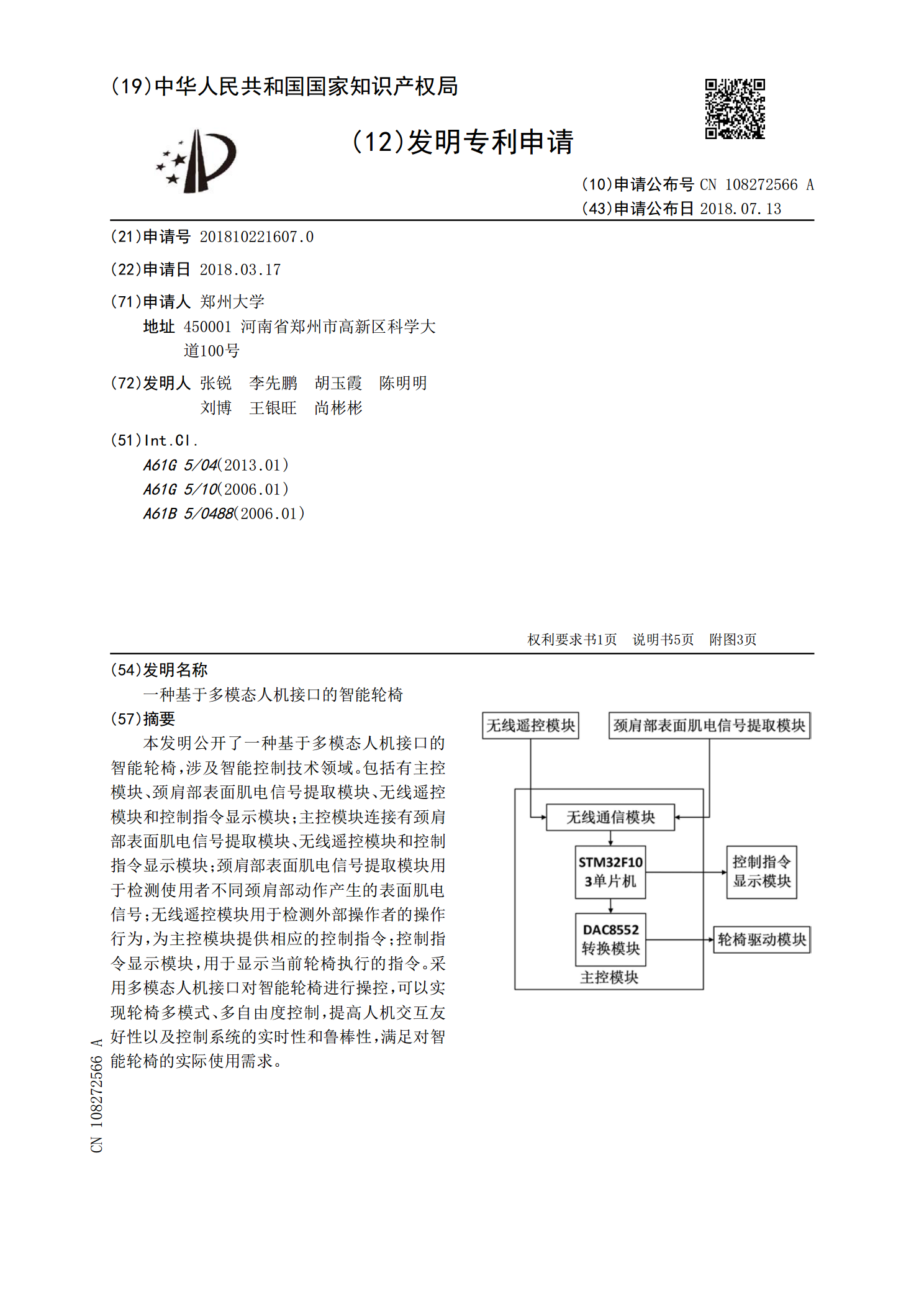
本发明公开了一种基于多模态人机接口的智能轮椅,涉及智能控制技术领域。包括有主控模块、颈肩部表面肌电信号提取模块、无线遥控模块和控制指令显示模块;主控模块连接有颈肩部表面肌电信号提取模块、无线遥控模块和控制指令显示模块;颈肩部表面肌电信号提取模块用于检测使用者不同颈肩部动作产生的表面肌电信号;无线遥控模块用于检测外部操作者的操作行为,为主控模块提供相应的控制指令;控制指令显示模块,用于显示当前轮椅执行的指令。采用多模态人机接口对智能轮椅进行操控,可以实现轮椅多模式、多自由度控制,提高人机交互友好性以及控制系
基于多模态脑机接口的智能轮椅.pdf
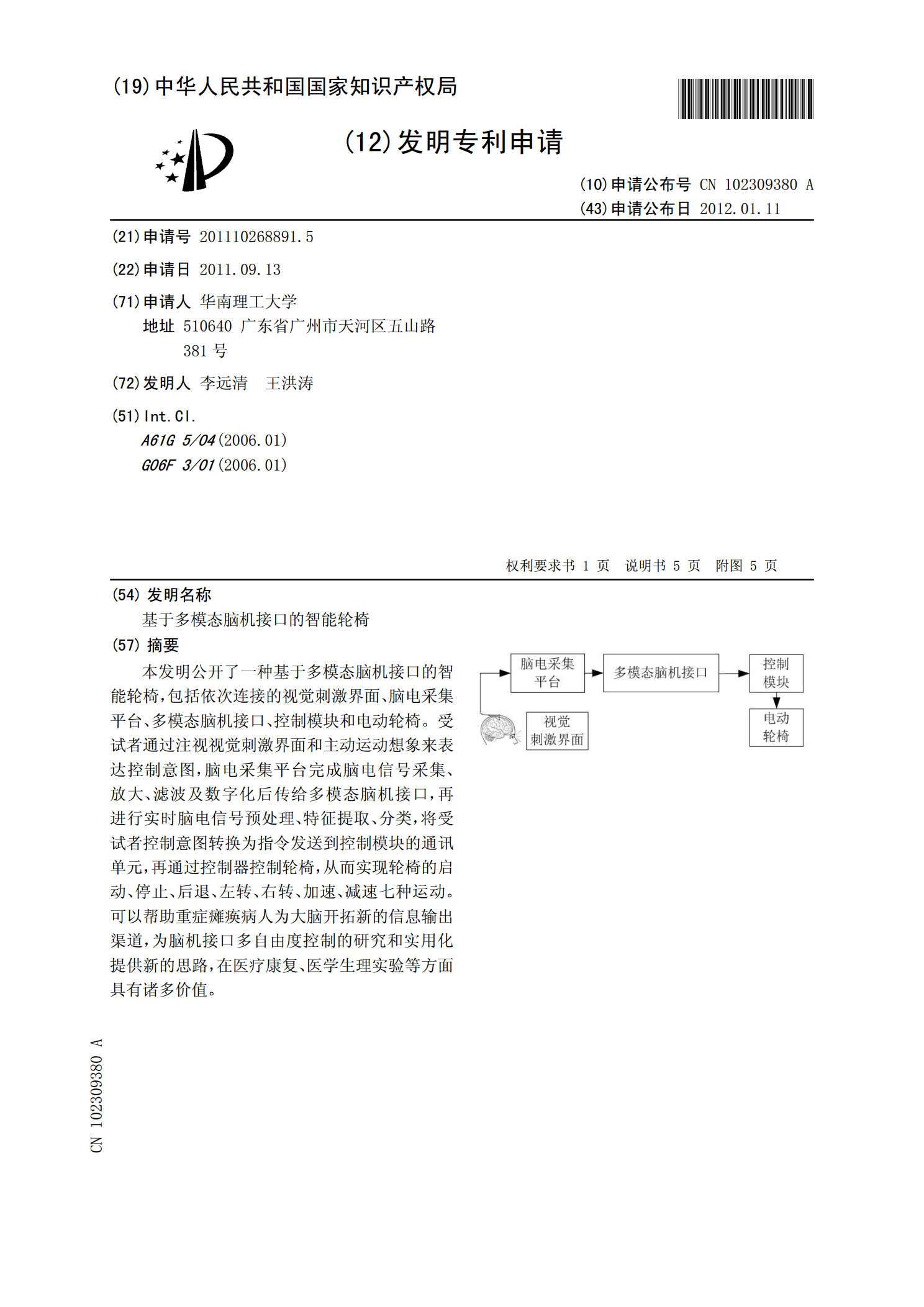
本发明公开了一种基于多模态脑机接口的智能轮椅,包括依次连接的视觉刺激界面、脑电采集平台、多模态脑机接口、控制模块和电动轮椅。受试者通过注视视觉刺激界面和主动运动想象来表达控制意图,脑电采集平台完成脑电信号采集、放大、滤波及数字化后传给多模态脑机接口,再进行实时脑电信号预处理、特征提取、分类,将受试者控制意图转换为指令发送到控制模块的通讯单元,再通过控制器控制轮椅,从而实现轮椅的启动、停止、后退、左转、右转、加速、减速七种运动。可以帮助重症瘫痪病人为大脑开拓新的信息输出渠道,为脑机接口多自由度控制的研究和实
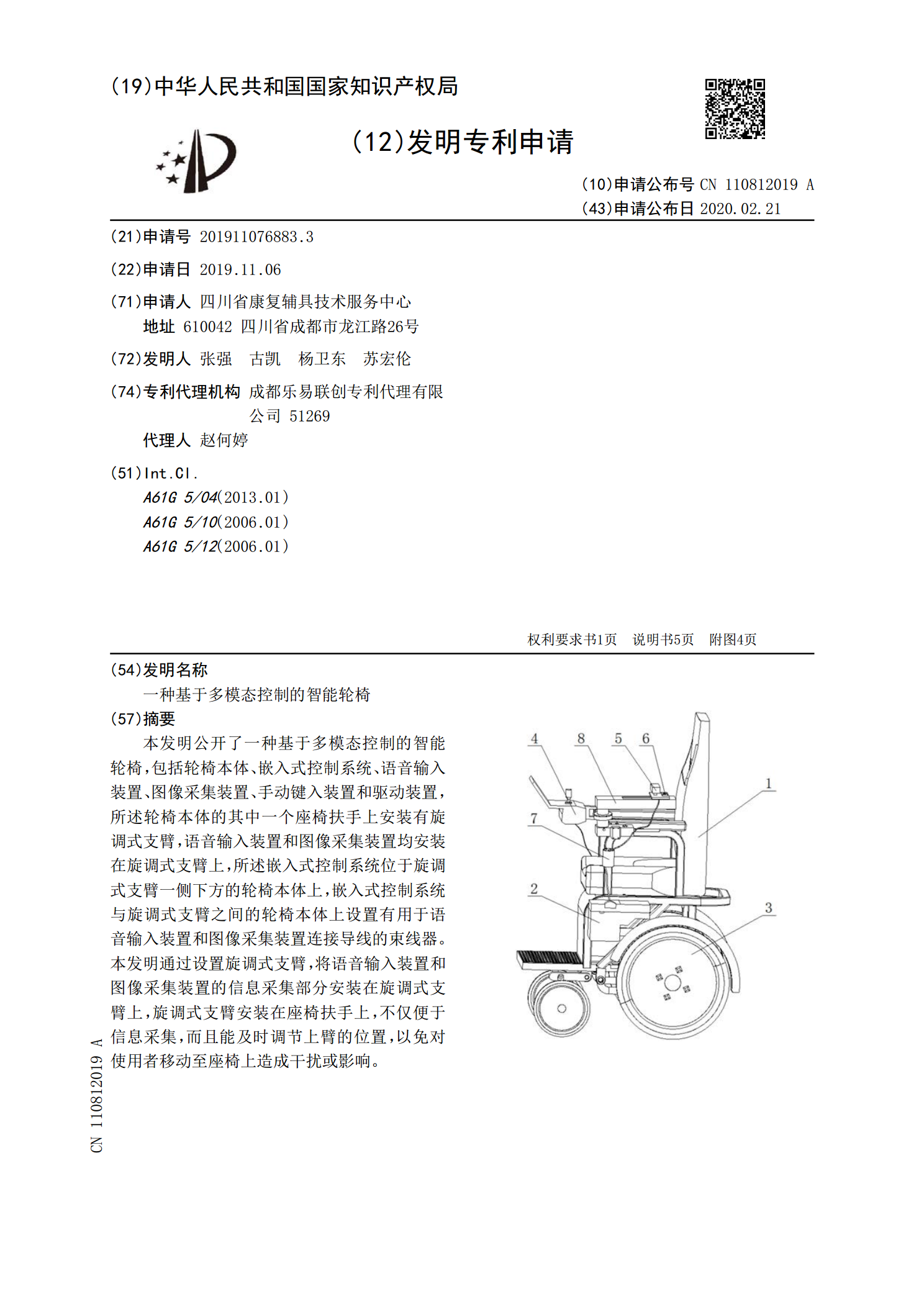
一种基于多模态控制的智能轮椅.pdf
本发明公开了一种基于多模态控制的智能轮椅,包括轮椅本体、嵌入式控制系统、语音输入装置、图像采集装置、手动键入装置和驱动装置,所述轮椅本体的其中一个座椅扶手上安装有旋调式支臂,语音输入装置和图像采集装置均安装在旋调式支臂上,所述嵌入式控制系统位于旋调式支臂一侧下方的轮椅本体上,嵌入式控制系统与旋调式支臂之间的轮椅本体上设置有用于语音输入装置和图像采集装置连接导线的束线器。本发明通过设置旋调式支臂,将语音输入装置和图像采集装置的信息采集部分安装在旋调式支臂上,旋调式支臂安装在座椅扶手上,不仅便于信息采集,而且
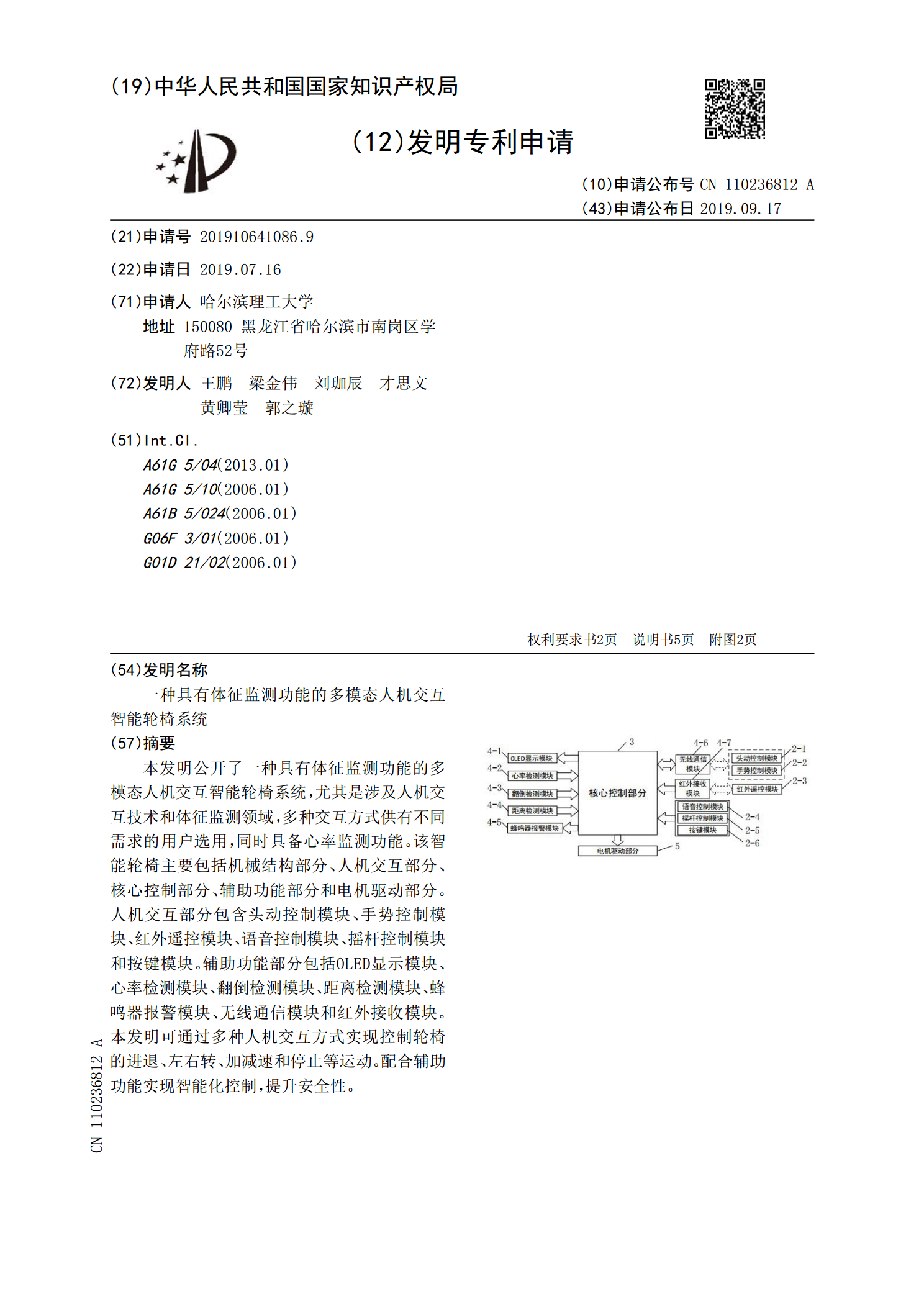
一种具有体征监测功能的多模态人机交互智能轮椅系统.pdf
本发明公开了一种具有体征监测功能的多模态人机交互智能轮椅系统,尤其是涉及人机交互技术和体征监测领域,多种交互方式供有不同需求的用户选用,同时具备心率监测功能。该智能轮椅主要包括机械结构部分、人机交互部分、核心控制部分、辅助功能部分和电机驱动部分。人机交互部分包含头动控制模块、手势控制模块、红外遥控模块、语音控制模块、摇杆控制模块和按键模块。辅助功能部分包括OLED显示模块、心率检测模块、翻倒检测模块、距离检测模块、蜂鸣器报警模块、无线通信模块和红外接收模块。本发明可通过多种人机交互方式实现控制轮椅的进退、

一种智能轮椅多模态控制系统.pdf
本发明及一种智能轮椅多模态控制系统,该控制系统可实现多种控制方式的任意选用,方便不同类型的行动不便着使用。该系统由机械结构部分、人机交互部分、环境感知部分、语音控制中可避障部分、自主避障部分、驱动部分组成,并设计了语音控制中避障,自主避障,手动控制等富有特色的交互方式,一般在每个系统中都是几种方式共存,以便根据环境、用户身体状况来选择合适的接口。它有两种控制方式,手柄控制和键盘控制。轮椅本身配有电机控制器,通过对直流电机的开环控制控制轮椅的前进、后退、加速、减速、左转、右转、停止等运动控制。