
用于致动系统的控制系统.pdf

小琛****82


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于致动系统的控制系统.pdf
一种控制设备组件的方法,设备组件特别为用于飞行器前轮的转向系统,该方法包含提供设备组件(12),其包含第一设备(14),第一设备(14)具有监视第一设备的第一传感器(52a)。该设备组件还包含第二设备(16),其与第一设备通信,第二设备具有监视第二设备的第二传感器(52b)。该方法还包含提供控制器(44),其适用于控制设备组件。控制器的外控制环(62)接收设置点(46)和反馈信号(56),其中,反馈信号由第二传感器提供。第一控制输出信号(82)从外控制环被传送到控制器的内控制环(64)。内控制环接收第一控
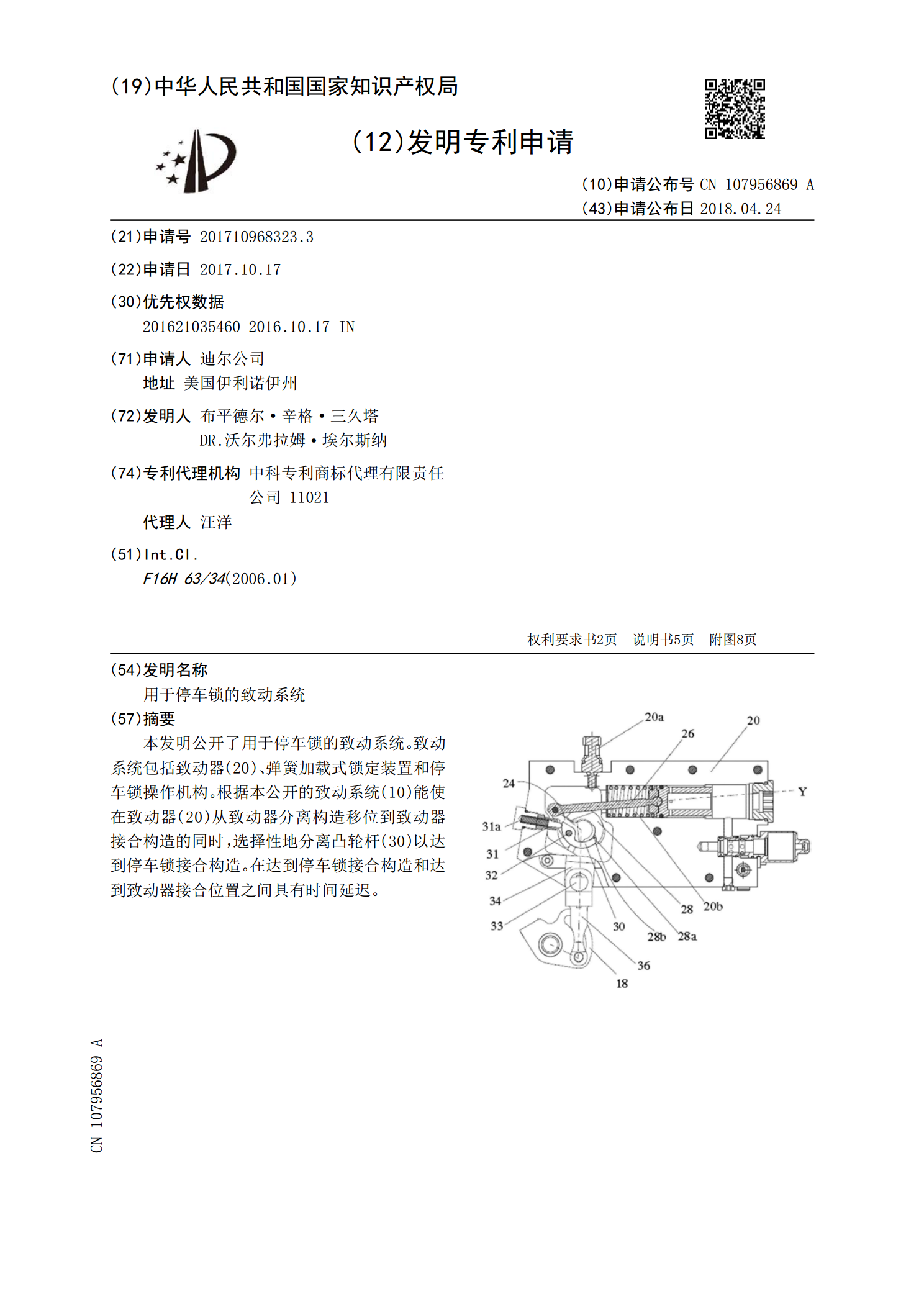
用于停车锁的致动系统.pdf
本发明公开了用于停车锁的致动系统。致动系统包括致动器(20)、弹簧加载式锁定装置和停车锁操作机构。根据本公开的致动系统(10)能使在致动器(20)从致动器分离构造移位到致动器接合构造的同时,选择性地分离凸轮杆(30)以达到停车锁接合构造。在达到停车锁接合构造和达到致动器接合位置之间具有时间延迟。
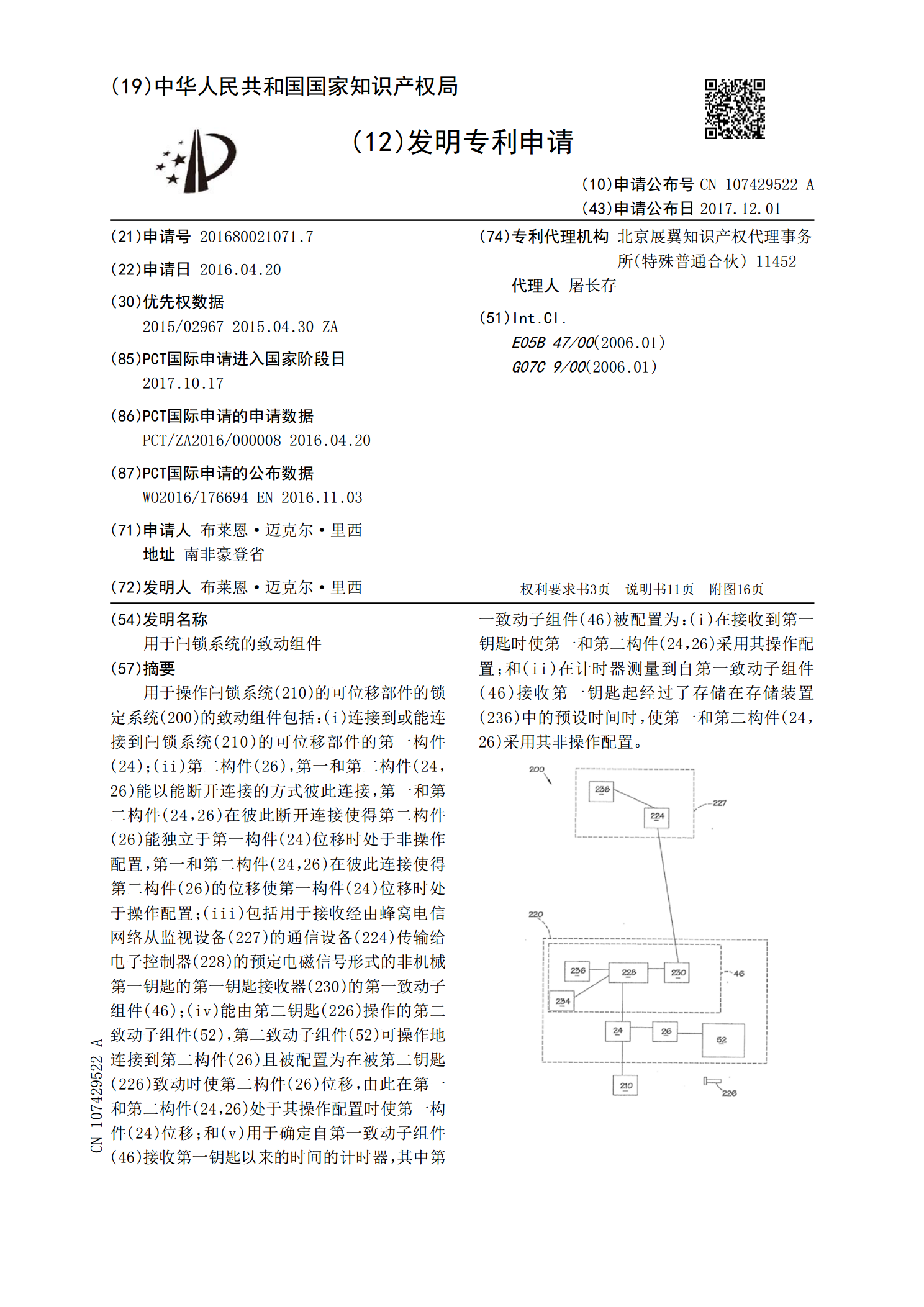
用于闩锁系统的致动组件.pdf
用于操作闩锁系统(210)的可位移部件的锁定系统(200)的致动组件包括:(i)连接到或能连接到闩锁系统(210)的可位移部件的第一构件(24);(ii)第二构件(26),第一和第二构件(24,26)能以能断开连接的方式彼此连接,第一和第二构件(24,26)在彼此断开连接使得第二构件(26)能独立于第一构件(24)位移时处于非操作配置,第一和第二构件(24,26)在彼此连接使得第二构件(26)的位移使第一构件(24)位移时处于操作配置;(iii)包括用于接收经由蜂窝电信网络从监视设备(227)的通信设备(

致动器系统,尤其用于车辆.pdf
本发明涉及一种致动器系统,其尤其用于车辆,包含电动机(2),其与螺纹轴(7)形成啮合,以便将所述电动机(2)的旋转运动转换为所述螺纹轴(7)的平移运动。在能够以简单方法进行高精度扭矩测量的致动器系统中,被施加旋转运动的、在内部被闭合的磁场线(9)磁化的部件(8、14)与磁场传感器(10)相对,所述磁场传感器的敏感面相对于所述部件(8)的闭合磁场线(9)以径向的方式布置,其中,所述磁场传感器(10)与一个用于确定磁场变化所导致扭矩的分析单元相连。

用于阀致动系统的摇杆基座.pdf
公开了一种结合阀致动系统使用的摇杆基座。摇杆基座可以具有壳体,其具有顶部、底部、将顶部连接至底部的侧壁以及被设置在侧壁之间的端壁。摇杆基座还可以具有位于壳体内侧并且与侧壁形成为一体的摇杆臂支撑件以及从一个端壁朝壳体中心延伸的喷射器弹簧垫。摇杆基座可以进一步具有将喷射器弹簧垫连接至一个摇杆臂支撑件的肋部。