
轮足式爬壁机器人机构.pdf

An****70

1/9
2/9
3/9

4/9
5/9
6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轮足式爬壁机器人机构.pdf
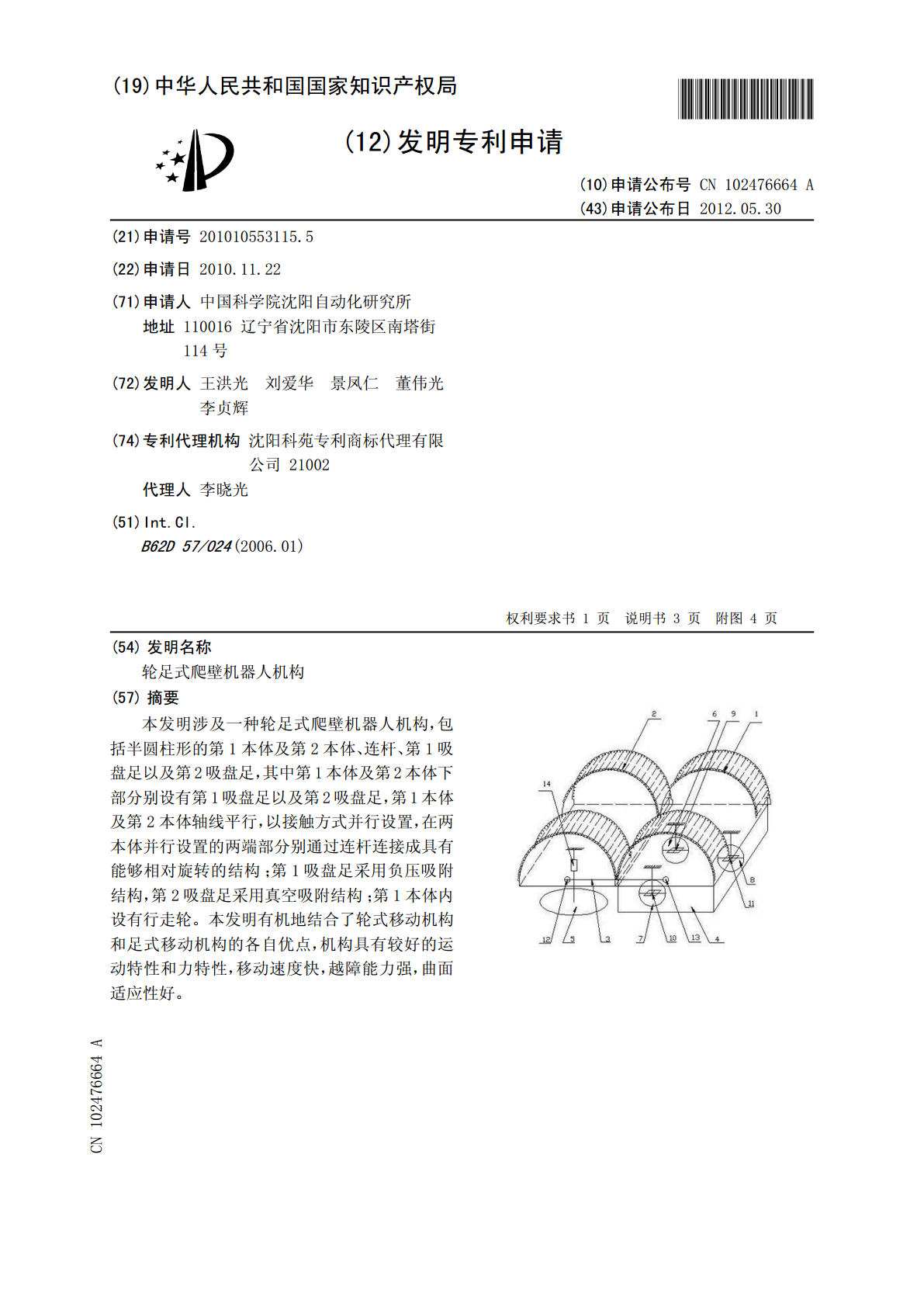
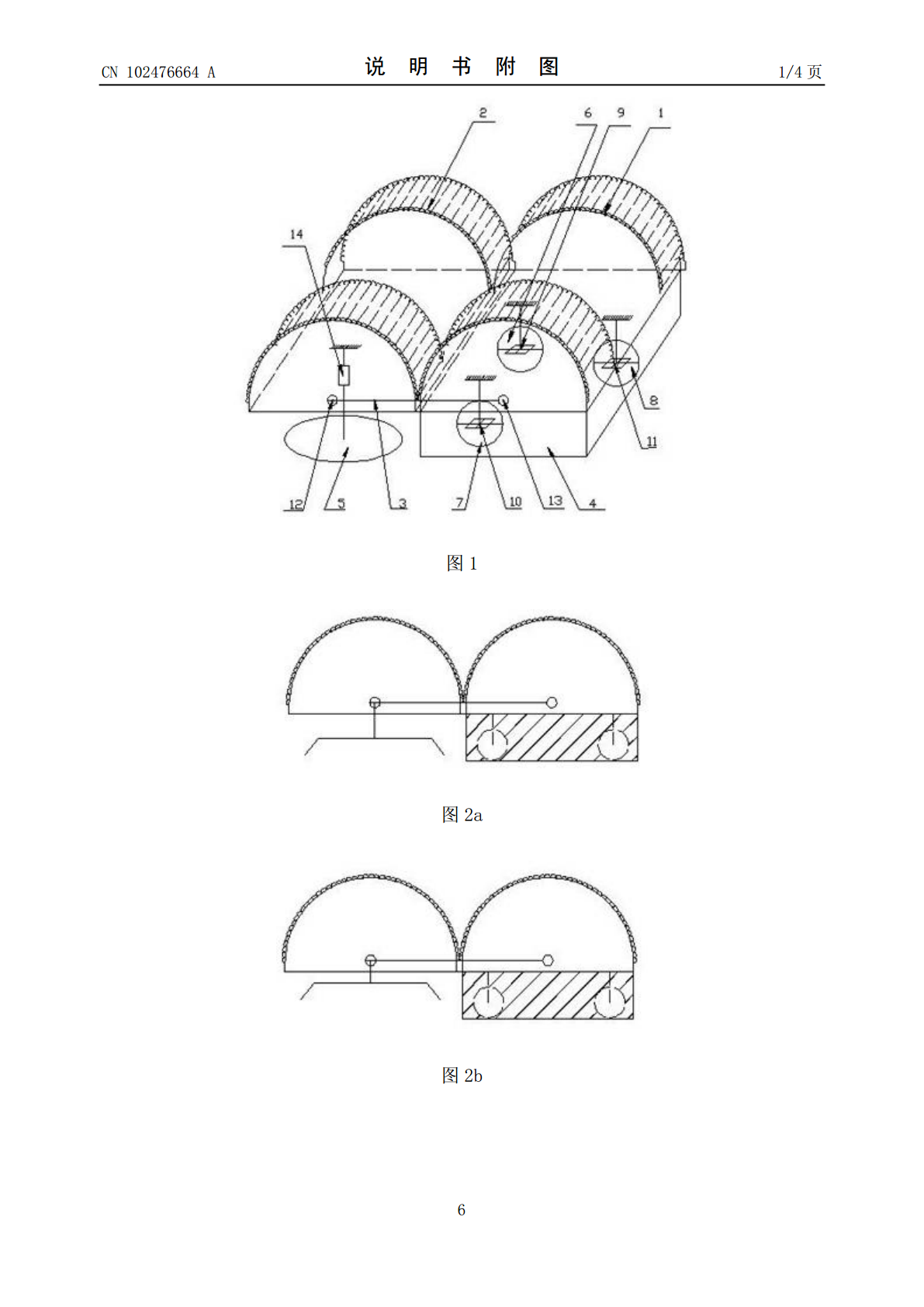
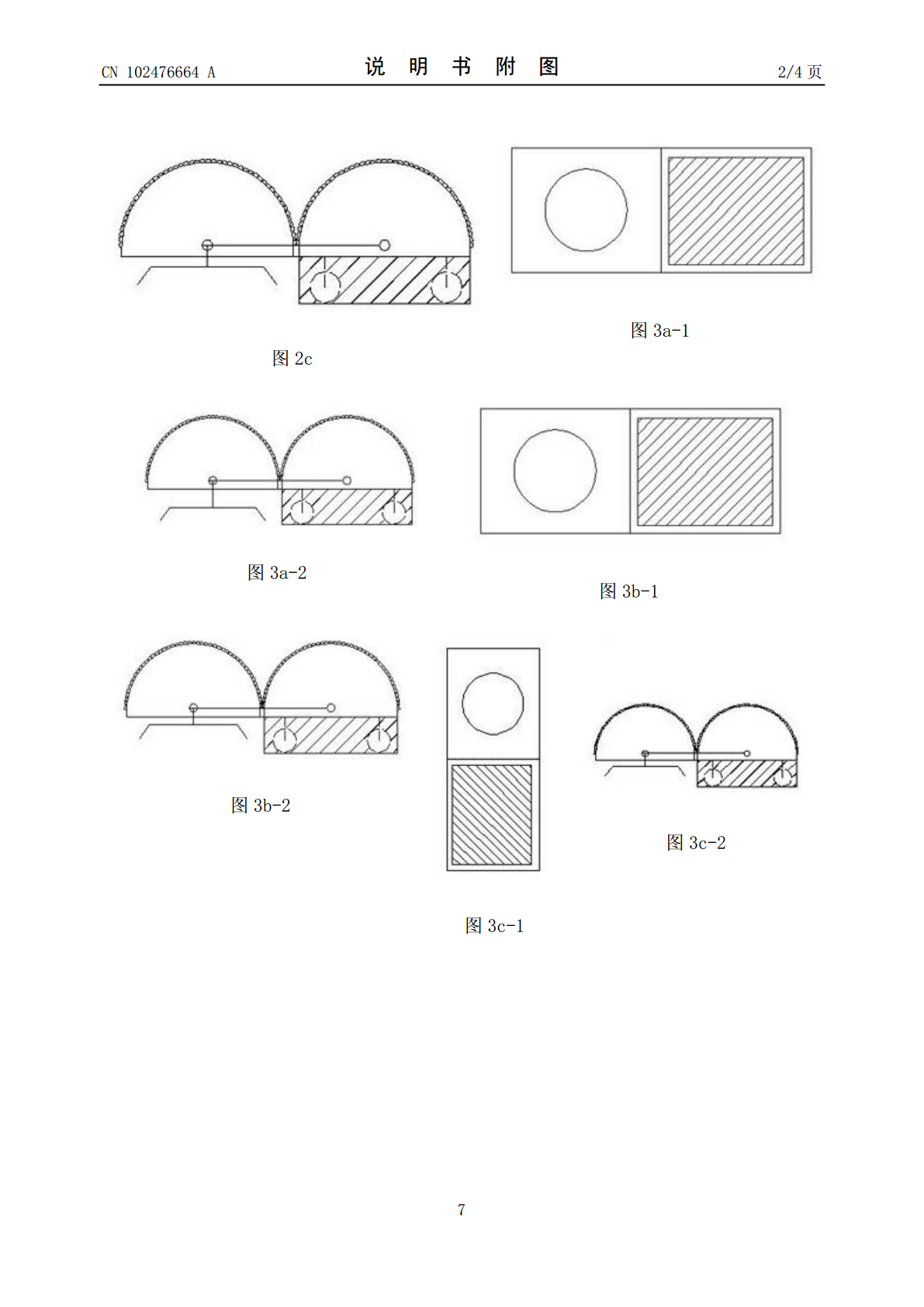
本发明涉及一种轮足式爬壁机器人机构,包括半圆柱形的第1本体及第2本体、连杆、第1吸盘足以及第2吸盘足,其中第1本体及第2本体下部分别设有第1吸盘足以及第2吸盘足,第1本体及第2本体轴线平行,以接触方式并行设置,在两本体并行设置的两端部分别通过连杆连接成具有能够相对旋转的结构;第1吸盘足采用负压吸附结构,第2吸盘足采用真空吸附结构;第1本体内设有行走轮。本发明有机地结合了轮式移动机构和足式移动机构的各自优点,机构具有较好的运动特性和力特性,移动速度快,越障能力强,曲面适应性好。
一种新型足式爬壁机器人运动机构.pdf
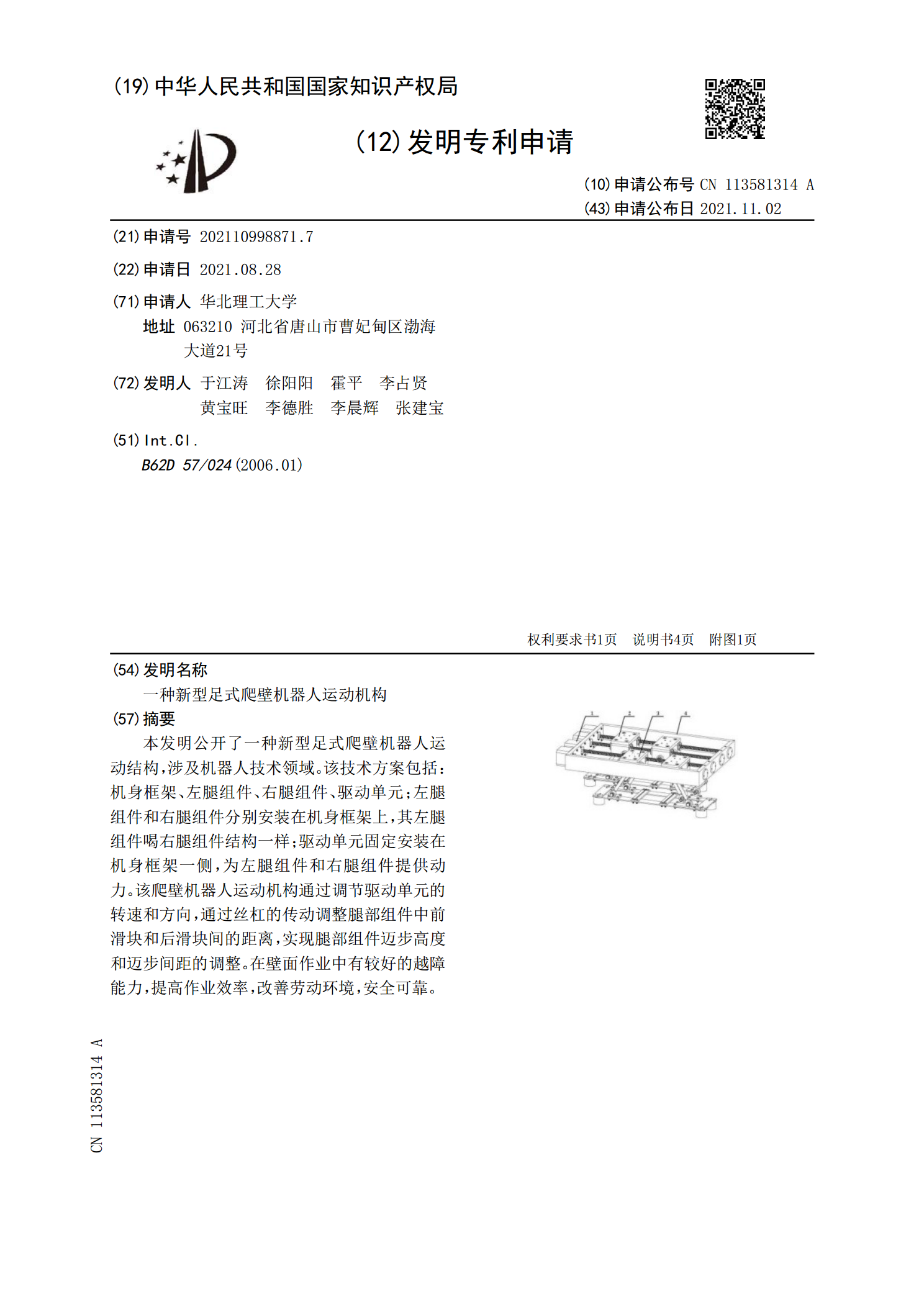
本发明公开了一种新型足式爬壁机器人运动结构,涉及机器人技术领域。该技术方案包括:机身框架、左腿组件、右腿组件、驱动单元;左腿组件和右腿组件分别安装在机身框架上,其左腿组件喝右腿组件结构一样;驱动单元固定安装在机身框架一侧,为左腿组件和右腿组件提供动力。该爬壁机器人运动机构通过调节驱动单元的转速和方向,通过丝杠的传动调整腿部组件中前滑块和后滑块间的距离,实现腿部组件迈步高度和迈步间距的调整。在壁面作业中有较好的越障能力,提高作业效率,改善劳动环境,安全可靠。
轮足组合越障非接触磁吸附式爬壁机器人系统.pdf
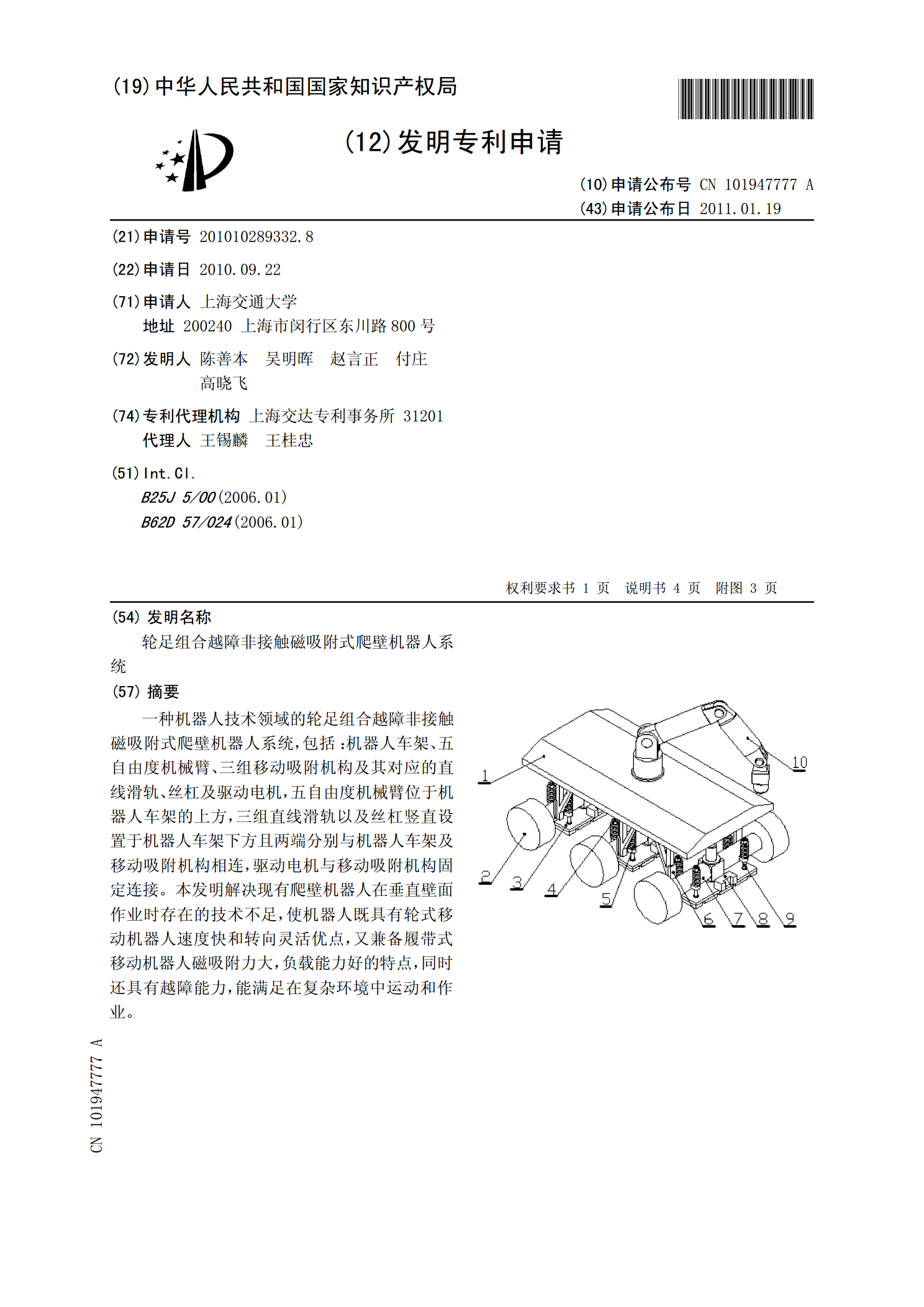
一种机器人技术领域的轮足组合越障非接触磁吸附式爬壁机器人系统,包括:机器人车架、五自由度机械臂、三组移动吸附机构及其对应的直线滑轨、丝杠及驱动电机,五自由度机械臂位于机器人车架的上方,三组直线滑轨以及丝杠竖直设置于机器人车架下方且两端分别与机器人车架及移动吸附机构相连,驱动电机与移动吸附机构固定连接。本发明解决现有爬壁机器人在垂直壁面作业时存在的技术不足,使机器人既具有轮式移动机器人速度快和转向灵活优点,又兼备履带式移动机器人磁吸附力大,负载能力好的特点,同时还具有越障能力,能满足在复杂环境中运动和作业。
钩爪式六足爬壁机器人及其运动方法.pdf
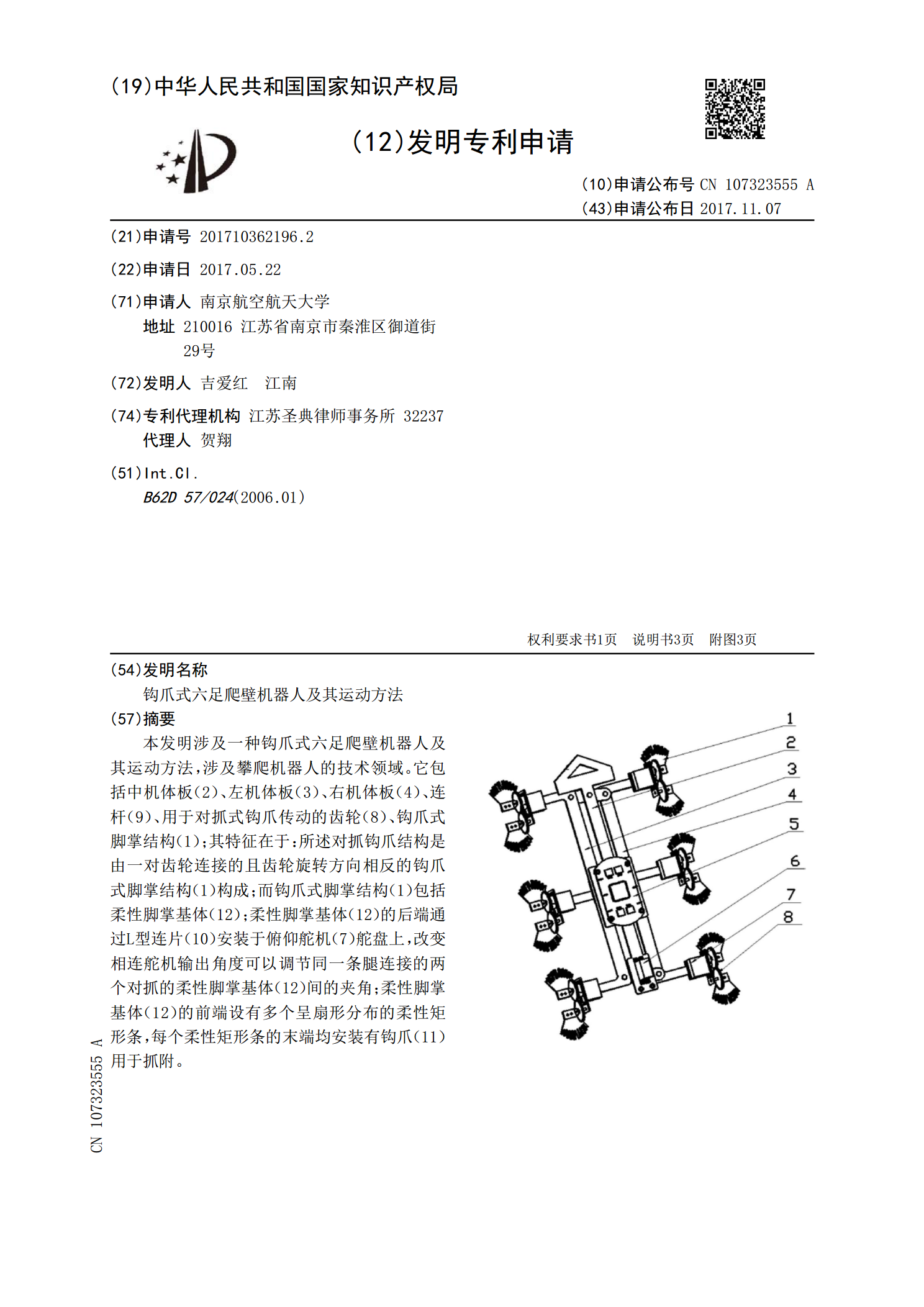
本发明涉及一种钩爪式六足爬壁机器人及其运动方法,涉及攀爬机器人的技术领域。它包括中机体板(2)、左机体板(3)、右机体板(4)、连杆(9)、用于对抓式钩爪传动的齿轮(8)、钩爪式脚掌结构(1);其特征在于:所述对抓钩爪结构是由一对齿轮连接的且齿轮旋转方向相反的钩爪式脚掌结构(1)构成;而钩爪式脚掌结构(1)包括柔性脚掌基体(12);柔性脚掌基体(12)的后端通过L型连片(10)安装于俯仰舵机(7)舵盘上,改变相连舵机输出角度可以调节同一条腿连接的两个对抓的柔性脚掌基体(12)间的夹角;柔性脚掌基体(12)

机器人的轮足式变形腿足机构.pdf
本发明公开了一种机器人的轮足式变形腿足机构,本体支撑件中包括一个本体支撑件伺服电机,其传动连接连接部一端以带动本体抬升或下降;连接部另一端连接固定于主腿,经连接部的牵引使得主腿和本体连动;主腿包括一个主腿伺服电机,其带动主腿相对于连接部运转;小腿包括一个小腿伺服电机,小腿一端经转轴铰链连接于主腿底部,小腿绕转轴相对于主腿成0°~90°夹角转动,小腿伺服电机传动连接轮足以实现轮式运动;还包括一个柔性牵拉部件,连接固定于小腿与主腿之间。本发明的腿部结构在足式行走中将小腿伺服电机收缩于主腿内,结构变形即可成轮式