
一种自动碰焊的方法及设备.pdf

一吃****继勇


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种自动碰焊的方法及设备.pdf
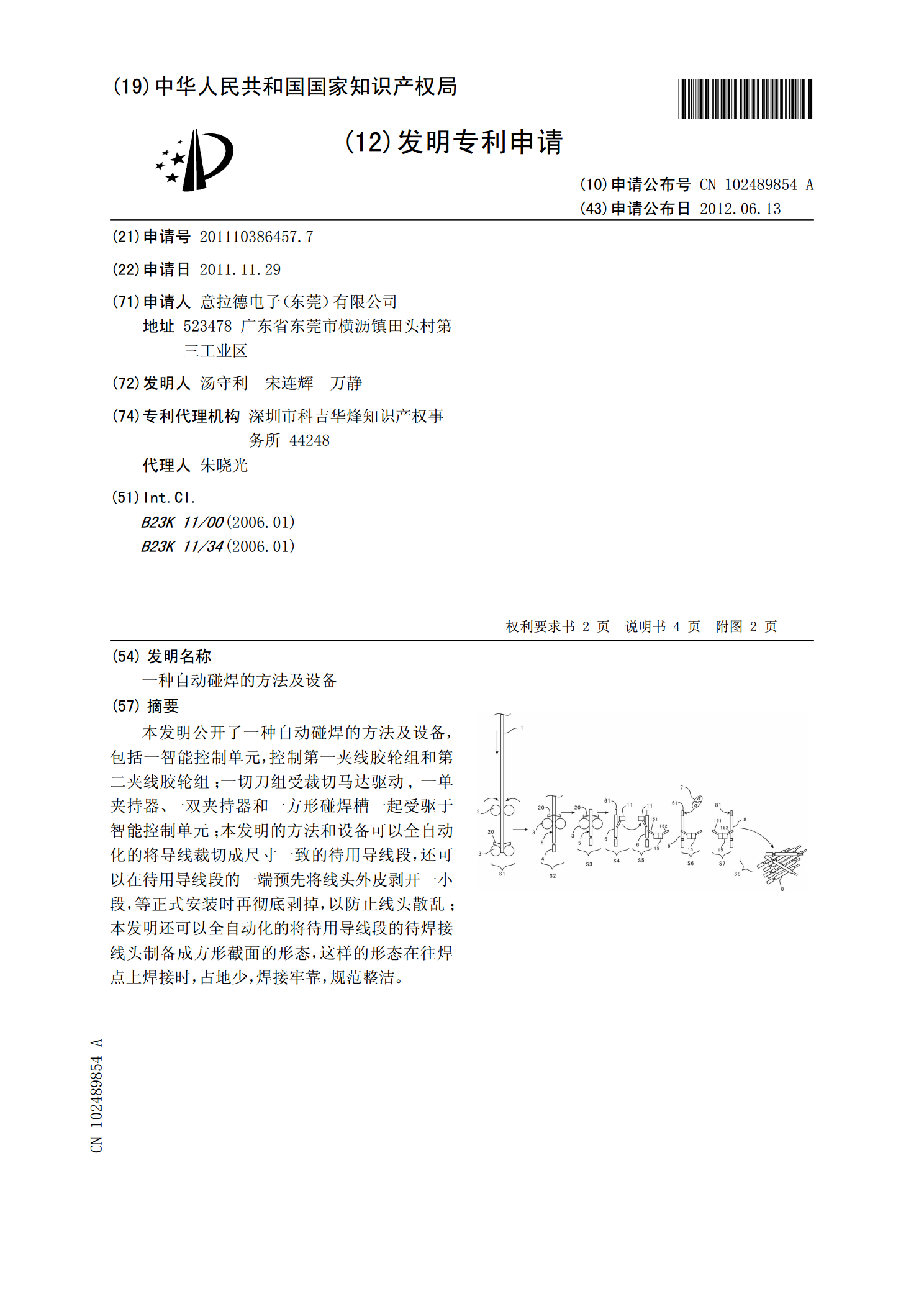
本发明公开了一种自动碰焊的方法及设备,包括一智能控制单元,控制第一夹线胶轮组和第二夹线胶轮组;一切刀组受裁切马达驱动,一单夹持器、一双夹持器和一方形碰焊槽一起受驱于智能控制单元;本发明的方法和设备可以全自动化的将导线裁切成尺寸一致的待用导线段,还可以在待用导线段的一端预先将线头外皮剥开一小段,等正式安装时再彻底剥掉,以防止线头散乱;本发明还可以全自动化的将待用导线段的待焊接线头制备成方形截面的形态,这样的形态在往焊点上焊接时,占地少,焊接牢靠,规范整洁。
一种碰焊铝螺母自动加工设备.pdf
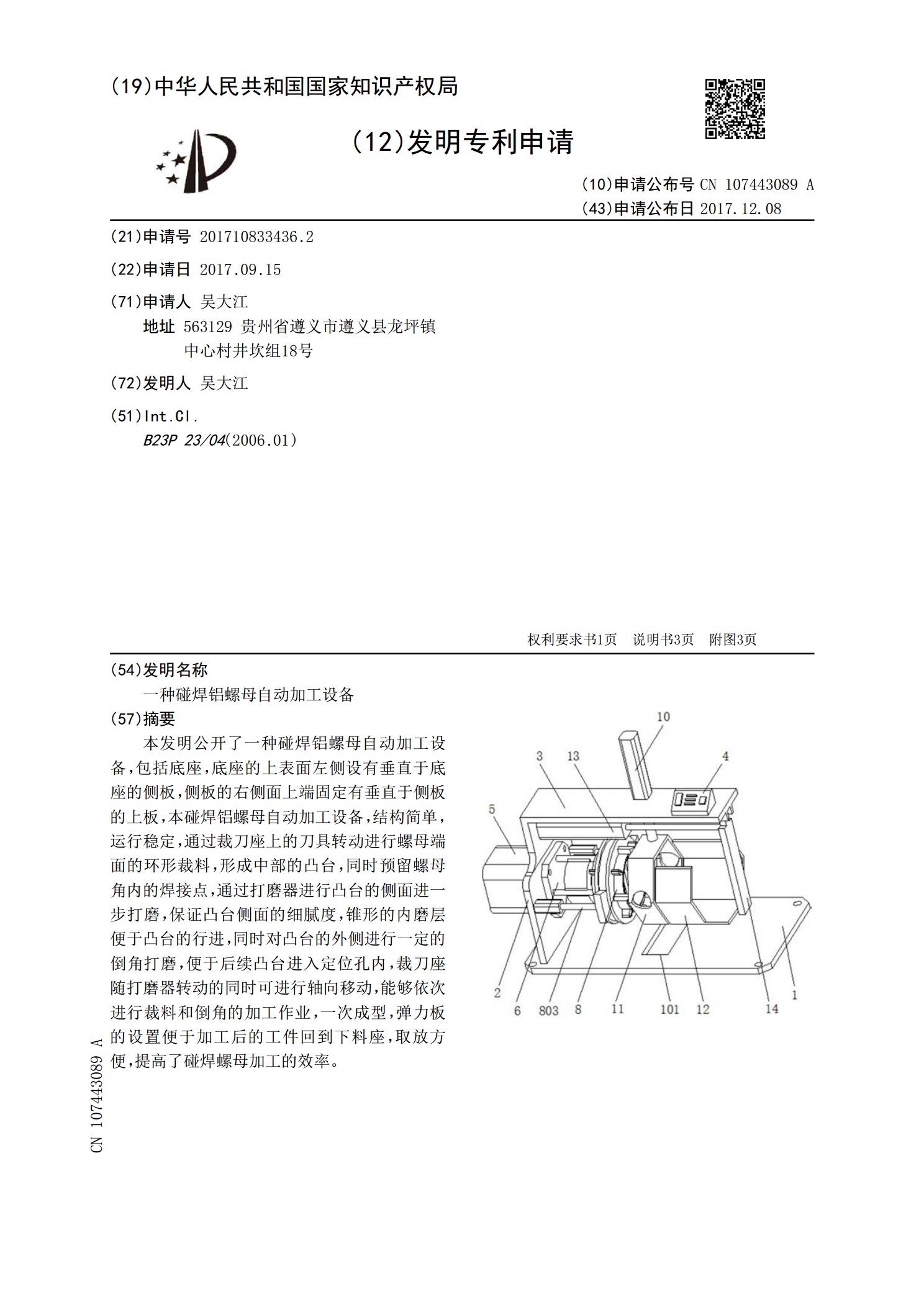
本发明公开了一种碰焊铝螺母自动加工设备,包括底座,底座的上表面左侧设有垂直于底座的侧板,侧板的右侧面上端固定有垂直于侧板的上板,本碰焊铝螺母自动加工设备,结构简单,运行稳定,通过裁刀座上的刀具转动进行螺母端面的环形裁料,形成中部的凸台,同时预留螺母角内的焊接点,通过打磨器进行凸台的侧面进一步打磨,保证凸台侧面的细腻度,锥形的内磨层便于凸台的行进,同时对凸台的外侧进行一定的倒角打磨,便于后续凸台进入定位孔内,裁刀座随打磨器转动的同时可进行轴向移动,能够依次进行裁料和倒角的加工作业,一次成型,弹力板的设置便于
一种自动碰焊装置.pdf
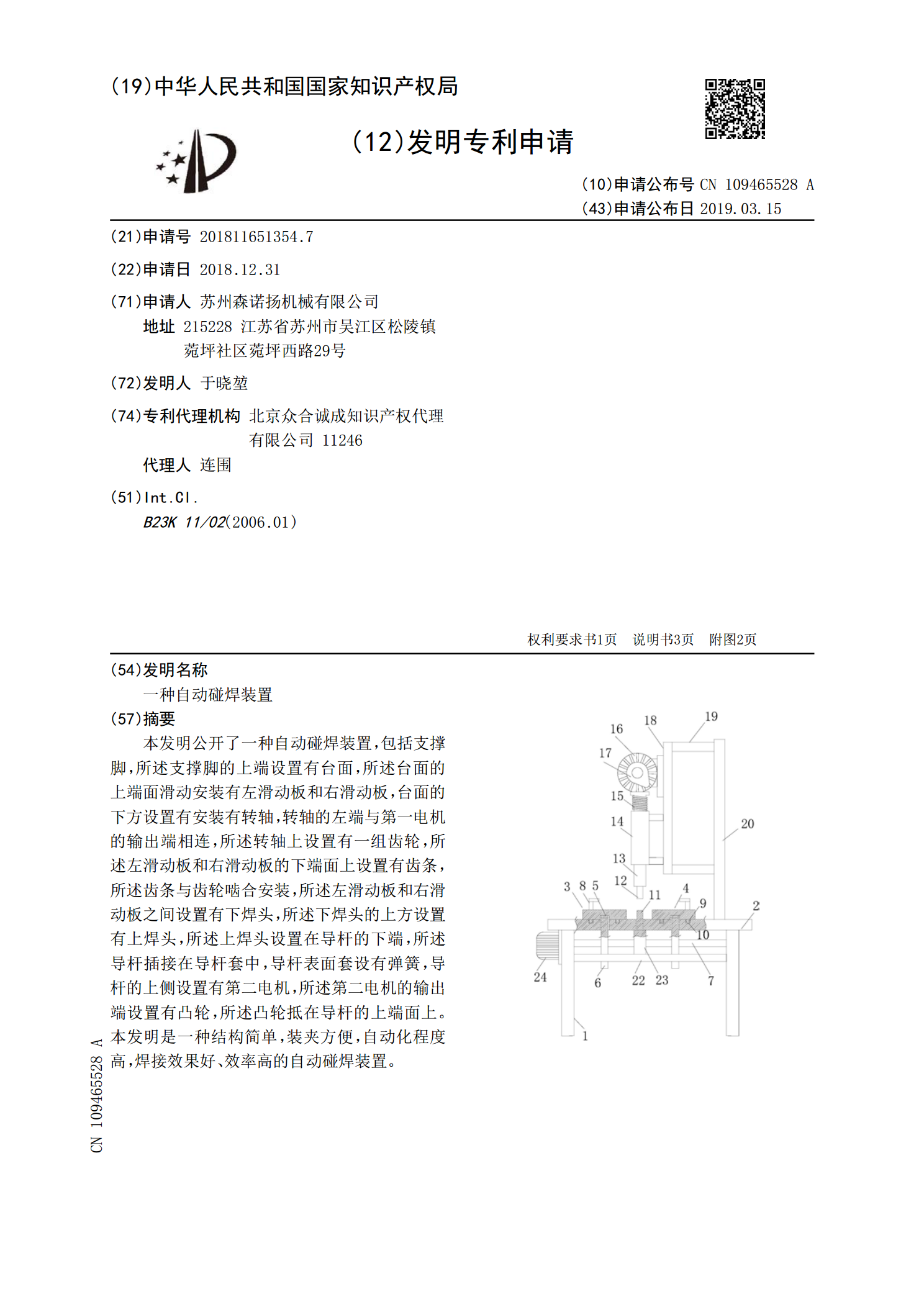
本发明公开了一种自动碰焊装置,包括支撑脚,所述支撑脚的上端设置有台面,所述台面的上端面滑动安装有左滑动板和右滑动板,台面的下方设置有安装有转轴,转轴的左端与第一电机的输出端相连,所述转轴上设置有一组齿轮,所述左滑动板和右滑动板的下端面上设置有齿条,所述齿条与齿轮啮合安装,所述左滑动板和右滑动板之间设置有下焊头,所述下焊头的上方设置有上焊头,所述上焊头设置在导杆的下端,所述导杆插接在导杆套中,导杆表面套设有弹簧,导杆的上侧设置有第二电机,所述第二电机的输出端设置有凸轮,所述凸轮抵在导杆的上端面上。本发明是一
一种纽扣电池自动碰焊装置.pdf
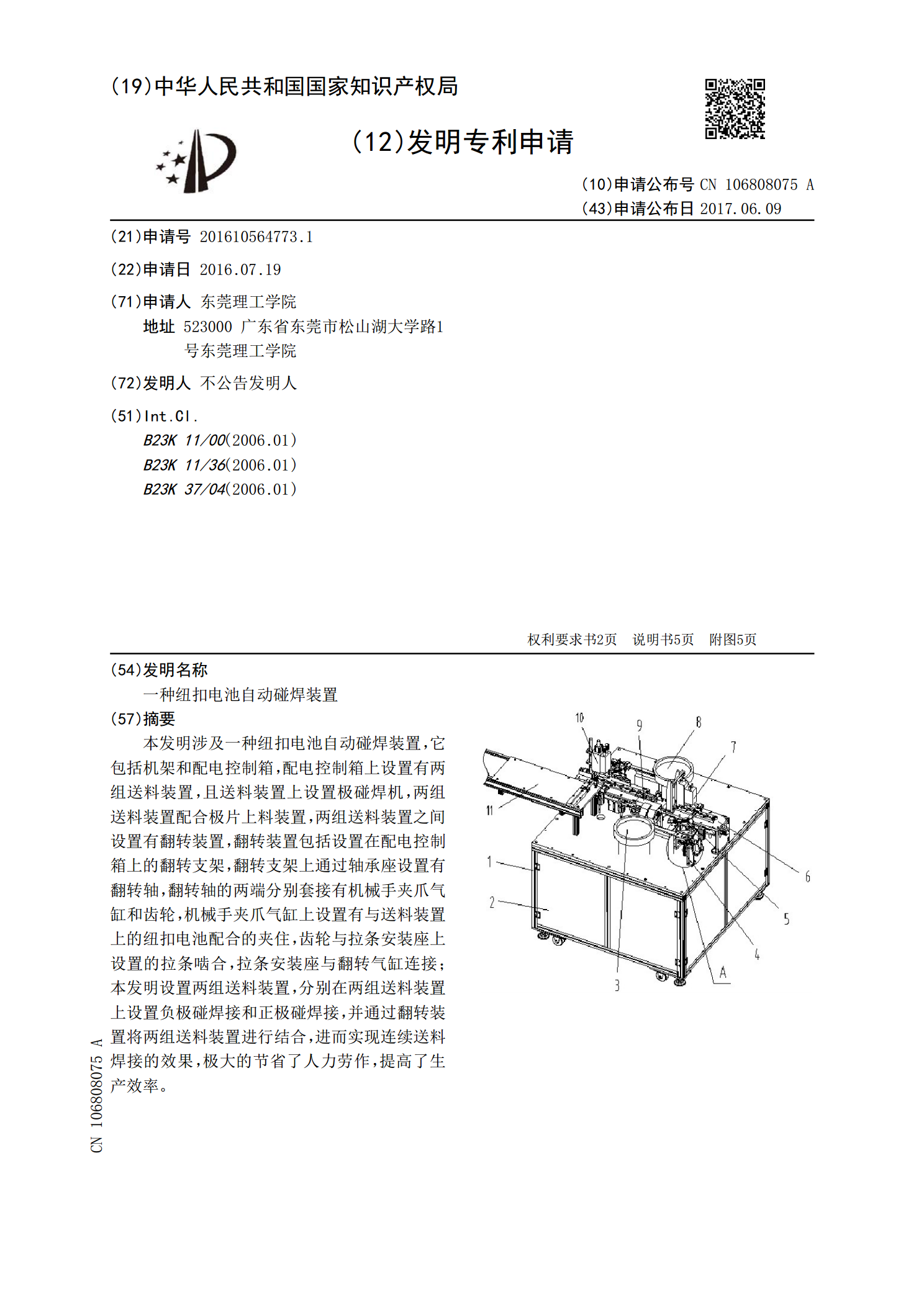
本发明涉及一种纽扣电池自动碰焊装置,它包括机架和配电控制箱,配电控制箱上设置有两组送料装置,且送料装置上设置极碰焊机,两组送料装置配合极片上料装置,两组送料装置之间设置有翻转装置,翻转装置包括设置在配电控制箱上的翻转支架,翻转支架上通过轴承座设置有翻转轴,翻转轴的两端分别套接有机械手夹爪气缸和齿轮,机械手夹爪气缸上设置有与送料装置上的纽扣电池配合的夹住,齿轮与拉条安装座上设置的拉条啮合,拉条安装座与翻转气缸连接;本发明设置两组送料装置,分别在两组送料装置上设置负极碰焊接和正极碰焊接,并通过翻转装置将两组送

一种碰焊连接钢筋的方法.pdf
本发明公开了一种碰焊连接钢筋的方法,包括以下步骤:(1)将钢筋的焊接端的上、下两侧加工出与碰焊机的碰焊嘴7对应的平焊面;(2)将需要焊接的两根钢筋固定到固定装置上,其中一根钢筋的末端与旋转电机6连接;(3)两根钢筋的焊接端对应,平焊面竖直设置,两根钢筋之间留有1‑4毫米缝隙,底部的平焊面与绝缘支撑连接;(4)碰焊机喷焊嘴7对准上部的平焊面进行焊接,上部平焊面焊接完成后,控制旋转电机将底部的平焊面朝上,再用碰焊机焊嘴7对准底部的平焊面进行焊接,预制平焊面焊接,且配合绝缘支撑,再通过电机旋转,采用双面碰焊,可