
多方向性滑觉传感器.pdf

mm****酱吖


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
多方向性滑觉传感器.pdf
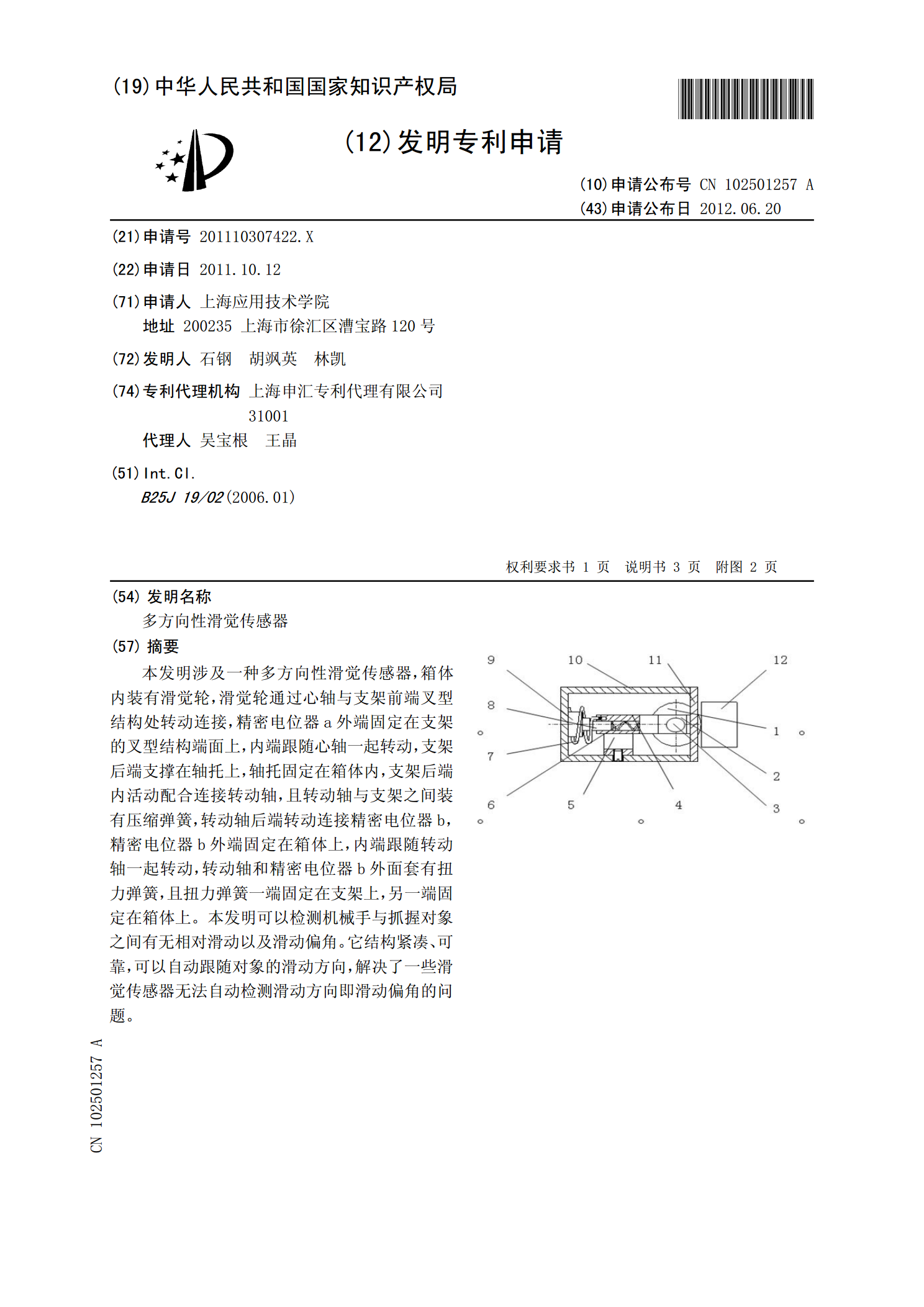
本发明涉及一种多方向性滑觉传感器,箱体内装有滑觉轮,滑觉轮通过心轴与支架前端叉型结构处转动连接,精密电位器a外端固定在支架的叉型结构端面上,内端跟随心轴一起转动,支架后端支撑在轴托上,轴托固定在箱体内,支架后端内活动配合连接转动轴,且转动轴与支架之间装有压缩弹簧,转动轴后端转动连接精密电位器b,精密电位器b外端固定在箱体上,内端跟随转动轴一起转动,转动轴和精密电位器b外面套有扭力弹簧,且扭力弹簧一端固定在支架上,另一端固定在箱体上。本发明可以检测机械手与抓握对象之间有无相对滑动以及滑动偏角。它结构紧凑、可

一种多方向性电容式滑觉传感器.pdf
本发明涉及一种用于智能机器人仿生皮肤的多方向性电容式滑觉传感器。传感器,包括一方形柔性基体,在其上表面四个角分别设置一上下表面贯通的方柱体,所述方柱体朝内的两相邻表面设有柔性感应极板;在柔性基体中心处设有一圆柱形触干,且触干壁上附四个各成直角、内部设有柔性公共极板的矩形体;在方柱体上面设有柔性上基板,柔性上基板与柔性基体平行、等尺寸且中心处留有上下贯通圆,在触干上表面设置一防滑橡胶触头。本发明电容式滑觉传感器成本低且高灵敏度,其检测方向不在局限于单一方向。
一种滑觉传感器及包括该滑觉传感器的夹持装置.pdf
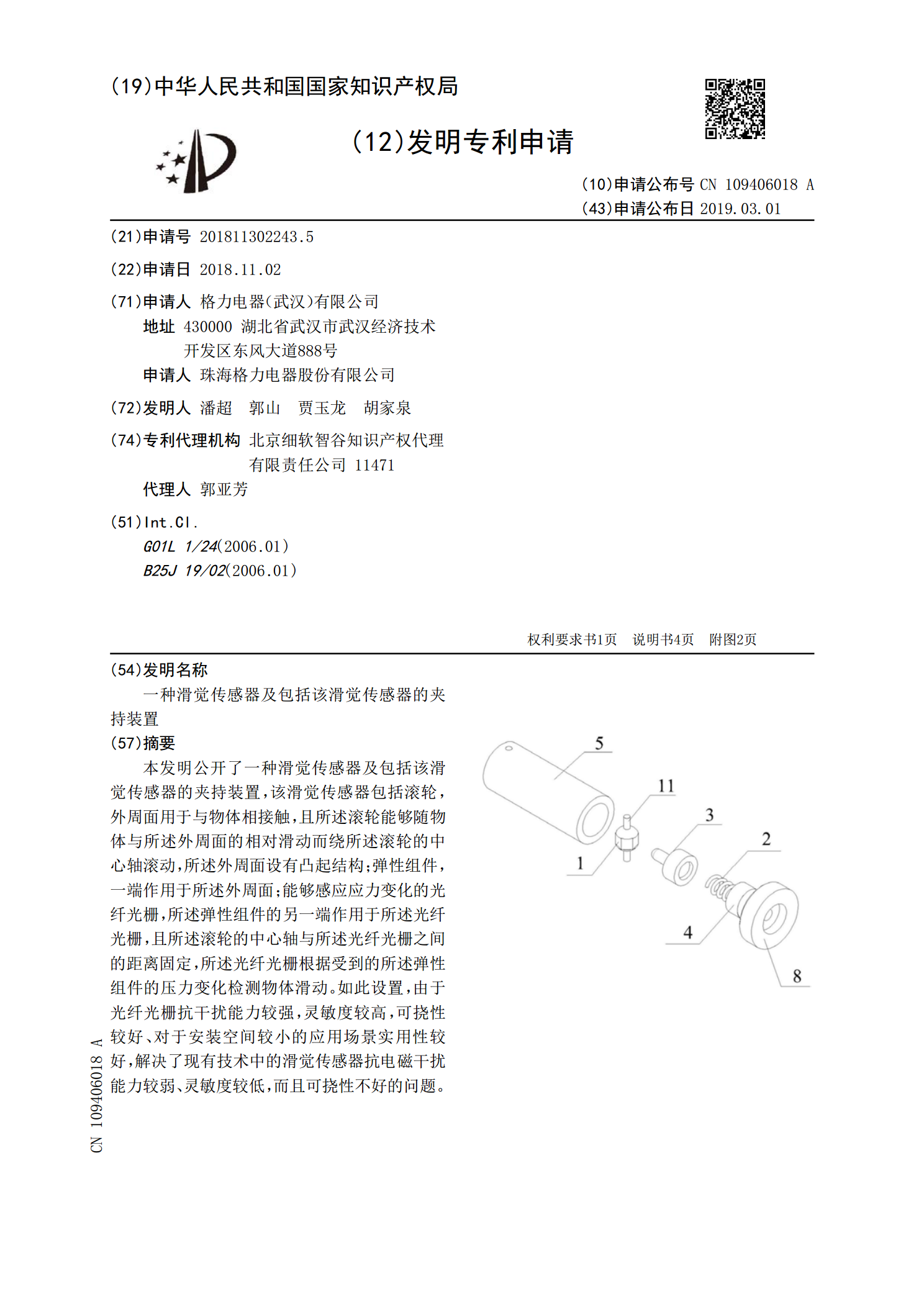
本发明公开了一种滑觉传感器及包括该滑觉传感器的夹持装置,该滑觉传感器包括滚轮,外周面用于与物体相接触,且所述滚轮能够随物体与所述外周面的相对滑动而绕所述滚轮的中心轴滚动,所述外周面设有凸起结构;弹性组件,一端作用于所述外周面;能够感应应力变化的光纤光栅,所述弹性组件的另一端作用于所述光纤光栅,且所述滚轮的中心轴与所述光纤光栅之间的距离固定,所述光纤光栅根据受到的所述弹性组件的压力变化检测物体滑动。如此设置,由于光纤光栅抗干扰能力较强,灵敏度较高,可挠性较好、对于安装空间较小的应用场景实用性较好,解决了现有

机器人滑觉传感器.ppt
机械手实现灵巧抓取的新型滑觉传感器主要内容:1.研究背景简介软抓取技术使易碎物品的无损伤抓取成为现实,实现软抓取需在机械手上安装相应的传感器以获取抓取位置、抓取力以及滑动等信息。滑觉传感器是一种主要应用于检测机械手手爪与被夹持物体之间相对滑动的装置,其性能优劣直接决定了机械手能否顺利完成软抓取任务。滑觉传感器国内外研究现状滑觉传感器国内外研究现状滑觉传感器国内外研究现状2.滑觉传感器的基本原理及组成结构传感器的基本结构两电极交替盘绕成螺旋结构(6mm×6mm),放置在环氧树脂玻璃或柔软纸板基底上,力敏导电

机器人滑觉传感器的研究.docx
机器人滑觉传感器的研究机器人滑觉传感器的研究摘要:滑觉传感器是机器人感知环境的重要组成部分,能够实时获取物体表面的摩擦与力信息,对于机器人在精确控制和操作中起着至关重要的作用。本论文通过综述滑觉传感器的发展历程、原理和应用领域,分析了滑觉传感器在机器人技术中的重要性和挑战。通过对滑觉传感器技术的当前研究进展的分析,提出了未来滑觉传感器研究的方向和发展趋势。1.引言机器人技术的发展已经取得了长足的进步,但是机器人在复杂环境下的灵活性和精确性仍然是一个挑战。而滑觉传感器作为机器人感知环境的重要组成部分,能够为