
一种单动力双向拉伸方法及其装置.pdf

波峻****99

1/7
2/7
3/7
4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种单动力双向拉伸方法及其装置.pdf
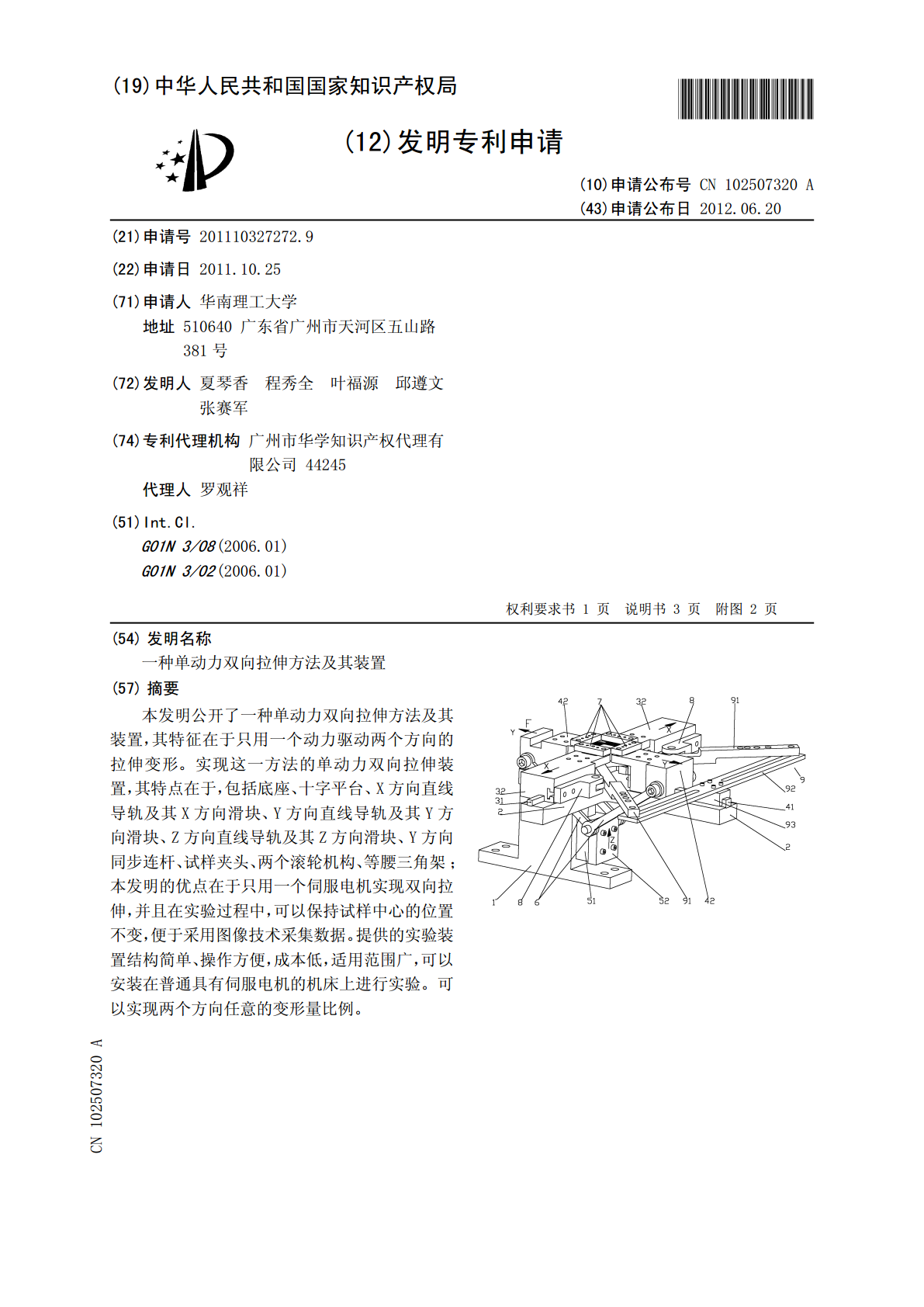
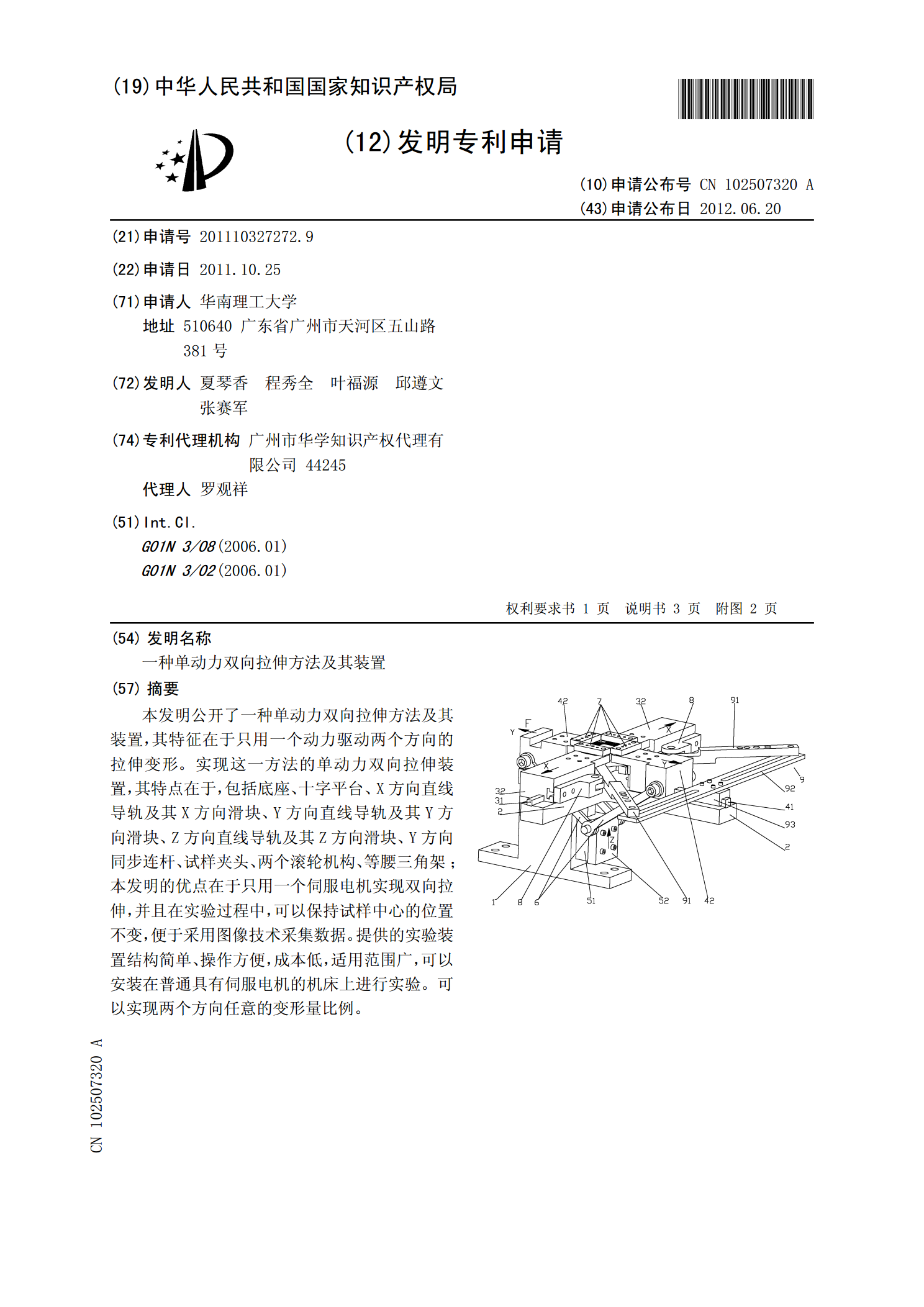
本发明公开了一种单动力双向拉伸方法及其装置,其特征在于只用一个动力驱动两个方向的拉伸变形。实现这一方法的单动力双向拉伸装置,其特点在于,包括底座、十字平台、X方向直线导轨及其X方向滑块、Y方向直线导轨及其Y方向滑块、Z方向直线导轨及其Z方向滑块、Y方向同步连杆、试样夹头、两个滚轮机构、等腰三角架;本发明的优点在于只用一个伺服电机实现双向拉伸,并且在实验过程中,可以保持试样中心的位置不变,便于采用图像技术采集数据。提供的实验装置结构简单、操作方便,成本低,适用范围广,可以安装在普通具有伺服电机的机床上进行实
双向拉伸装置及其方法.pdf
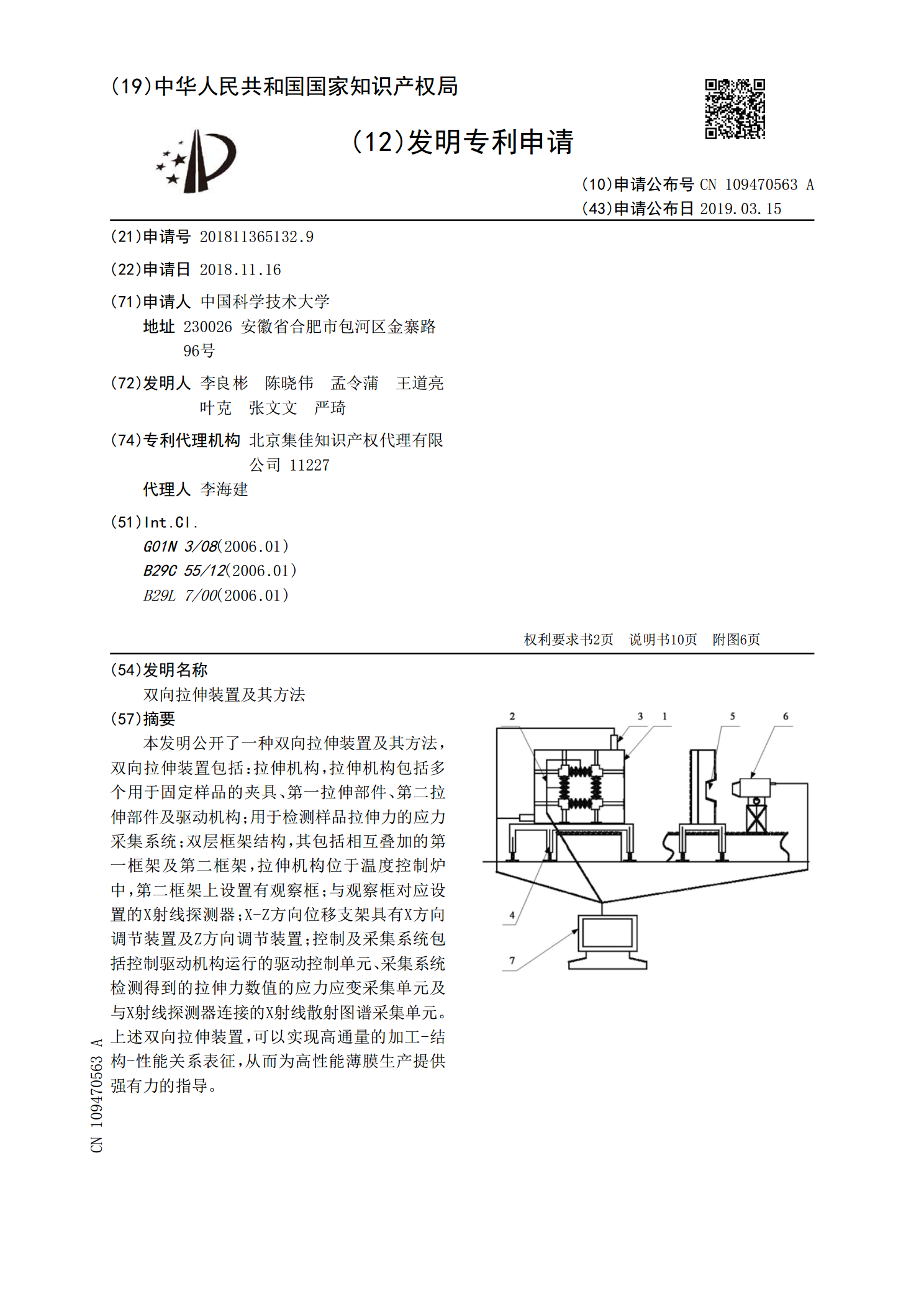
本发明公开了一种双向拉伸装置及其方法,双向拉伸装置包括:拉伸机构,拉伸机构包括多个用于固定样品的夹具、第一拉伸部件、第二拉伸部件及驱动机构;用于检测样品拉伸力的应力采集系统;双层框架结构,其包括相互叠加的第一框架及第二框架,拉伸机构位于温度控制炉中,第二框架上设置有观察框;与观察框对应设置的X射线探测器;X‑Z方向位移支架具有X方向调节装置及Z方向调节装置;控制及采集系统包括控制驱动机构运行的驱动控制单元、采集系统检测得到的拉伸力数值的应力应变采集单元及与X射线探测器连接的X射线散射图谱采集单元。上述双向
一种流体介质作用的单轴双向拉伸成形装置及其使用方法.pdf
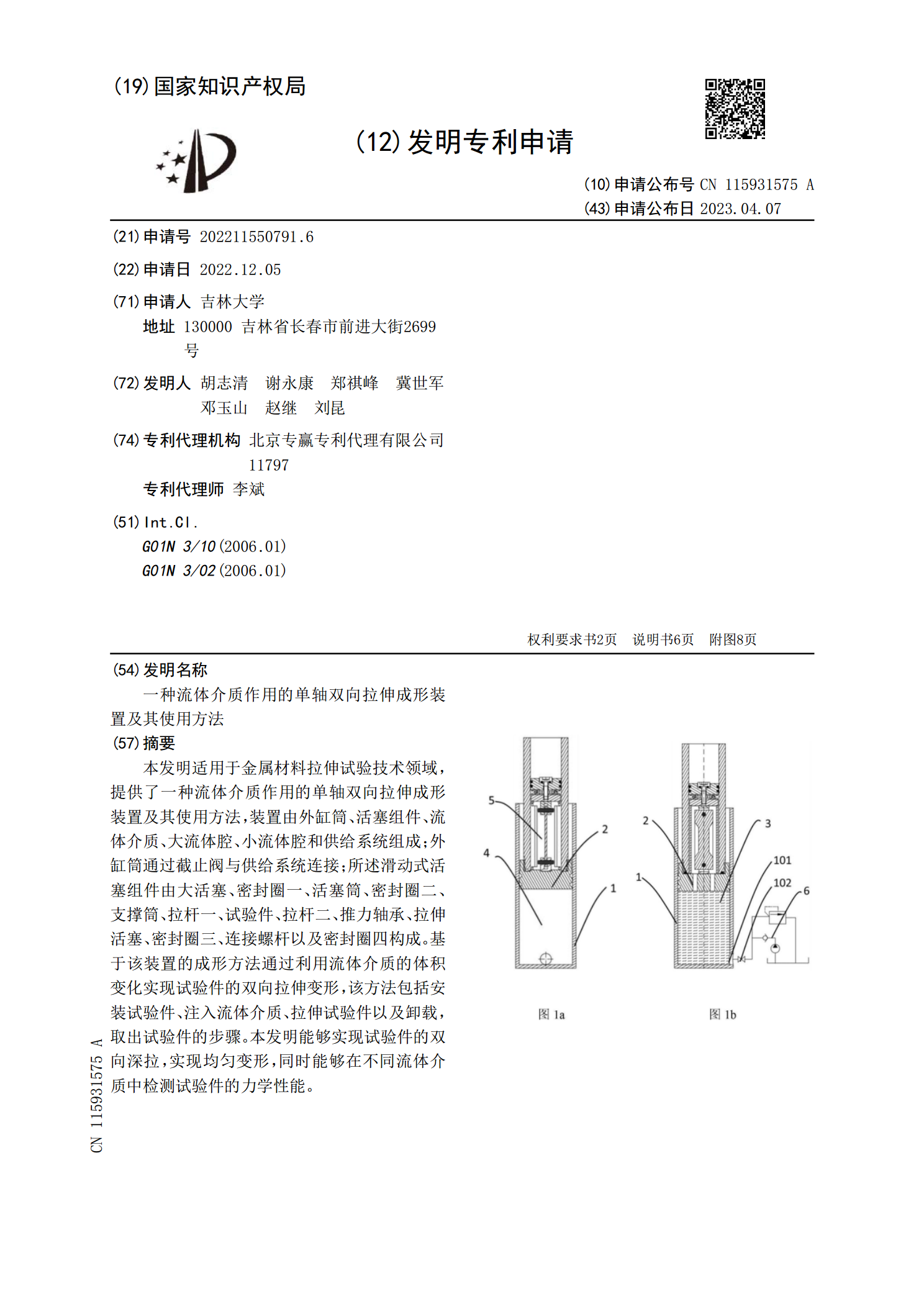
本发明适用于金属材料拉伸试验技术领域,提供了一种流体介质作用的单轴双向拉伸成形装置及其使用方法,装置由外缸筒、活塞组件、流体介质、大流体腔、小流体腔和供给系统组成;外缸筒通过截止阀与供给系统连接;所述滑动式活塞组件由大活塞、密封圈一、活塞筒、密封圈二、支撑筒、拉杆一、试验件、拉杆二、推力轴承、拉伸活塞、密封圈三、连接螺杆以及密封圈四构成。基于该装置的成形方法通过利用流体介质的体积变化实现试验件的双向拉伸变形,该方法包括安装试验件、注入流体介质、拉伸试验件以及卸载,取出试验件的步骤。本发明能够实现试验件的双
一种单驱变倍率双向拉伸静态薄膜装置.pdf
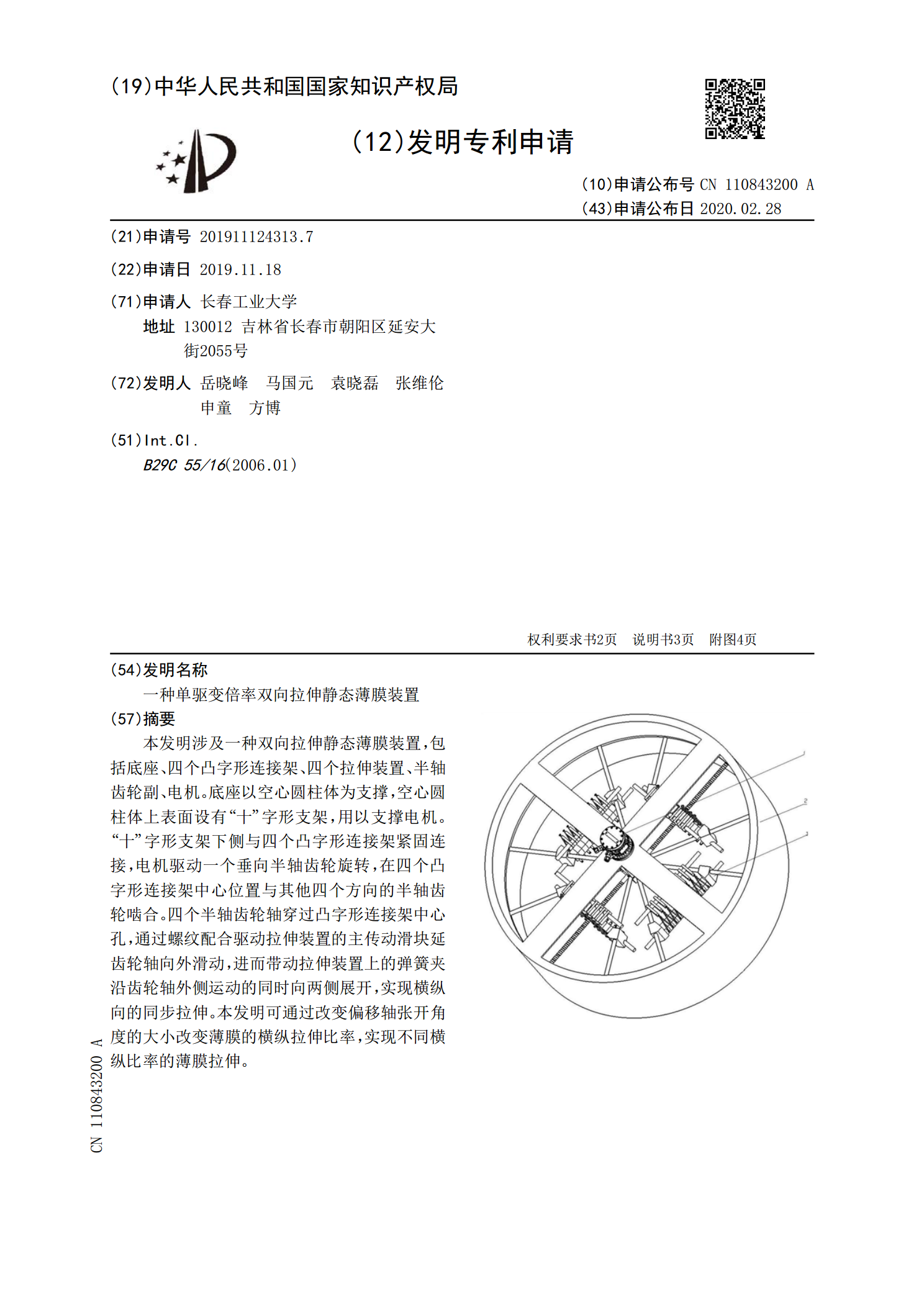
本发明涉及一种双向拉伸静态薄膜装置,包括底座、四个凸字形连接架、四个拉伸装置、半轴齿轮副、电机。底座以空心圆柱体为支撑,空心圆柱体上表面设有“十”字形支架,用以支撑电机。“十”字形支架下侧与四个凸字形连接架紧固连接,电机驱动一个垂向半轴齿轮旋转,在四个凸字形连接架中心位置与其他四个方向的半轴齿轮啮合。四个半轴齿轮轴穿过凸字形连接架中心孔,通过螺纹配合驱动拉伸装置的主传动滑块延齿轮轴向外滑动,进而带动拉伸装置上的弹簧夹沿齿轮轴外侧运动的同时向两侧展开,实现横纵向的同步拉伸。本发明可通过改变偏移轴张开角度的大
一种材料双向拉伸装置.pdf
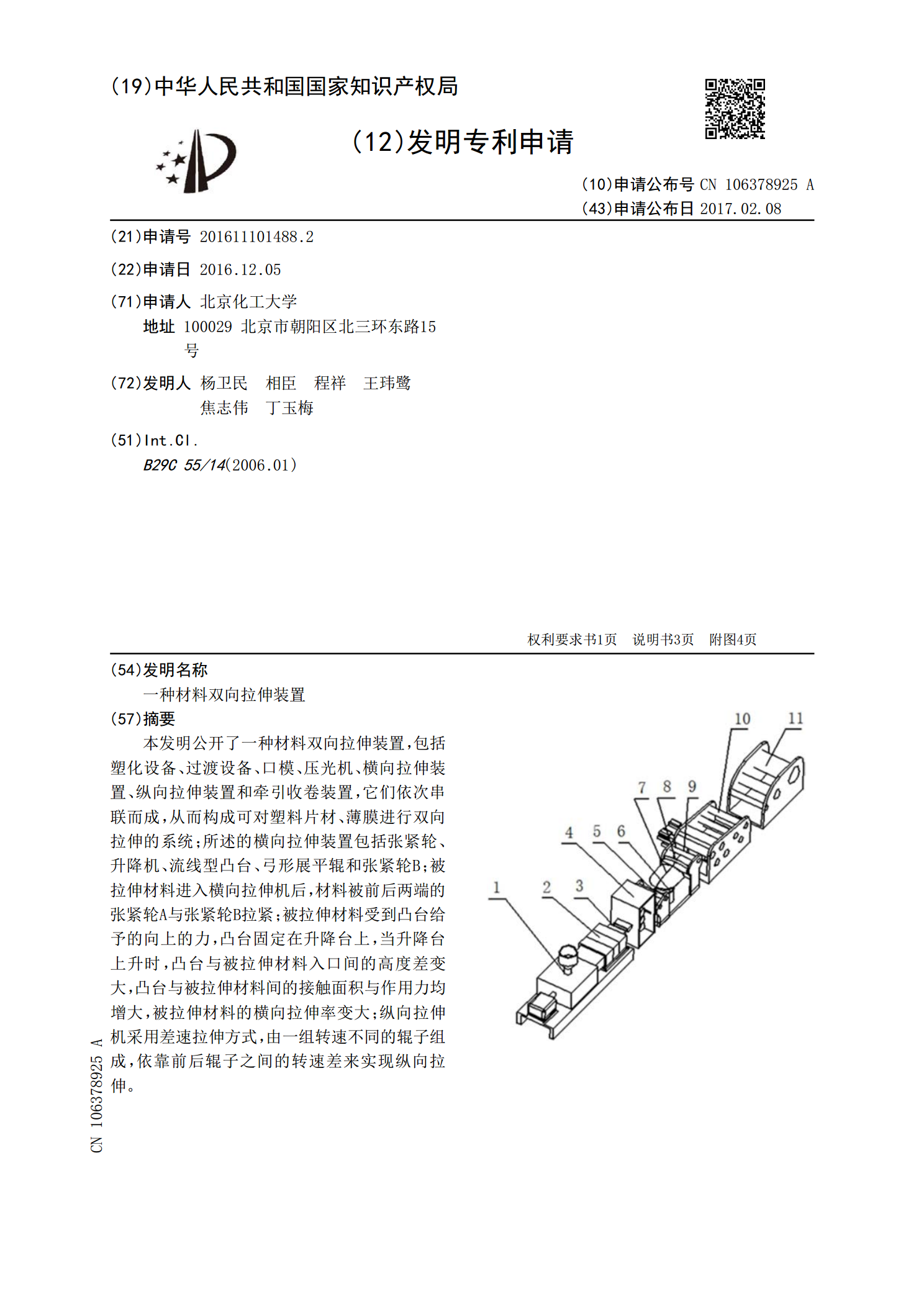
本发明公开了一种材料双向拉伸装置,包括塑化设备、过渡设备、口模、压光机、横向拉伸装置、纵向拉伸装置和牵引收卷装置,它们依次串联而成,从而构成可对塑料片材、薄膜进行双向拉伸的系统;所述的横向拉伸装置包括张紧轮、升降机、流线型凸台、弓形展平辊和张紧轮B;被拉伸材料进入横向拉伸机后,材料被前后两端的张紧轮A与张紧轮B拉紧;被拉伸材料受到凸台给予的向上的力,凸台固定在升降台上,当升降台上升时,凸台与被拉伸材料入口间的高度差变大,凸台与被拉伸材料间的接触面积与作用力均增大,被拉伸材料的横向拉伸率变大;纵向拉伸机采用