
一种物体表面轮廓测量中的相位补偿方法.pdf

是你****馨呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种物体表面轮廓测量中的相位补偿方法.pdf
一种物体表面轮廓测量中的相位补偿方法,基于结构光相移法对物体表面轮廓进行测量,由数字投影仪向作为被测物体的参考平面投射相移光栅,由数字相机采集投射到参考平面上的相移光栅,获得图像系列;依据相移法原理对获得的图像系列进行解相处理,获得表征参考平面轮廓的相位分布,随机选取相位分布的递增方向的N条相位数据作为实际相位分布数据集,用实际相位分布数据集减去相移光栅的已知相位分布,得到相位补偿误差数据集,采用正弦和函数对实际相位分布数据集与相位补偿误差数据集进行曲线拟合,进行相位补偿,以提高物体表面轮廓测量系统的测量
相位测量轮廓术中相位误差过补偿与欠补偿的解决方法.pdf
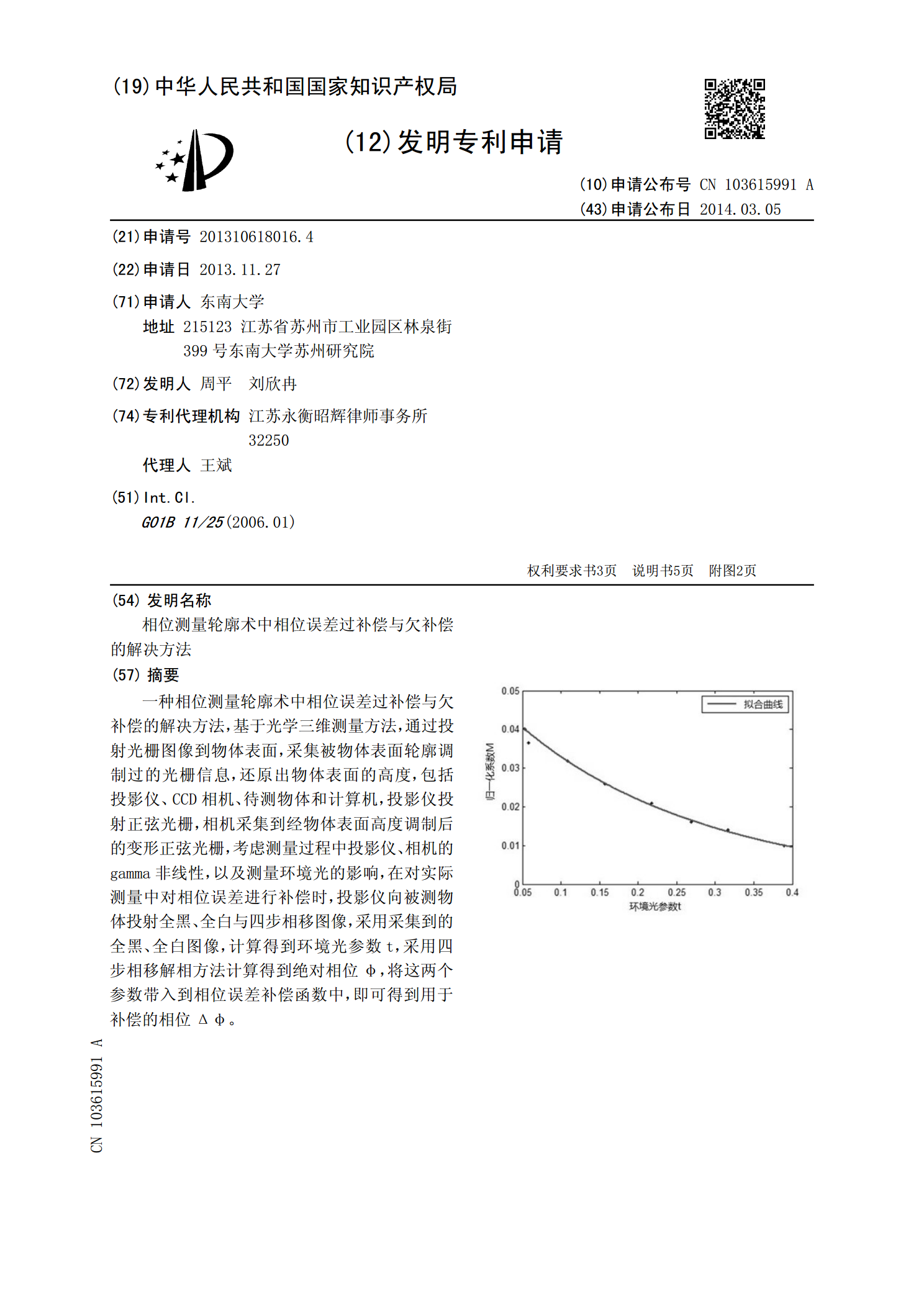
一种相位测量轮廓术中相位误差过补偿与欠补偿的解决方法,基于光学三维测量方法,通过投射光栅图像到物体表面,采集被物体表面轮廓调制过的光栅信息,还原出物体表面的高度,包括投影仪、CCD相机、待测物体和计算机,投影仪投射正弦光栅,相机采集到经物体表面高度调制后的变形正弦光栅,考虑测量过程中投影仪、相机的gamma非线性,以及测量环境光的影响,在对实际测量中对相位误差进行补偿时,投影仪向被测物体投射全黑、全白与四步相移图像,采用采集到的全黑、全白图像,计算得到环境光参数t,采用四步相移解相方法计算得到绝对相位φ,
一种高反光物体表面轮廓测量装置及方法.pdf
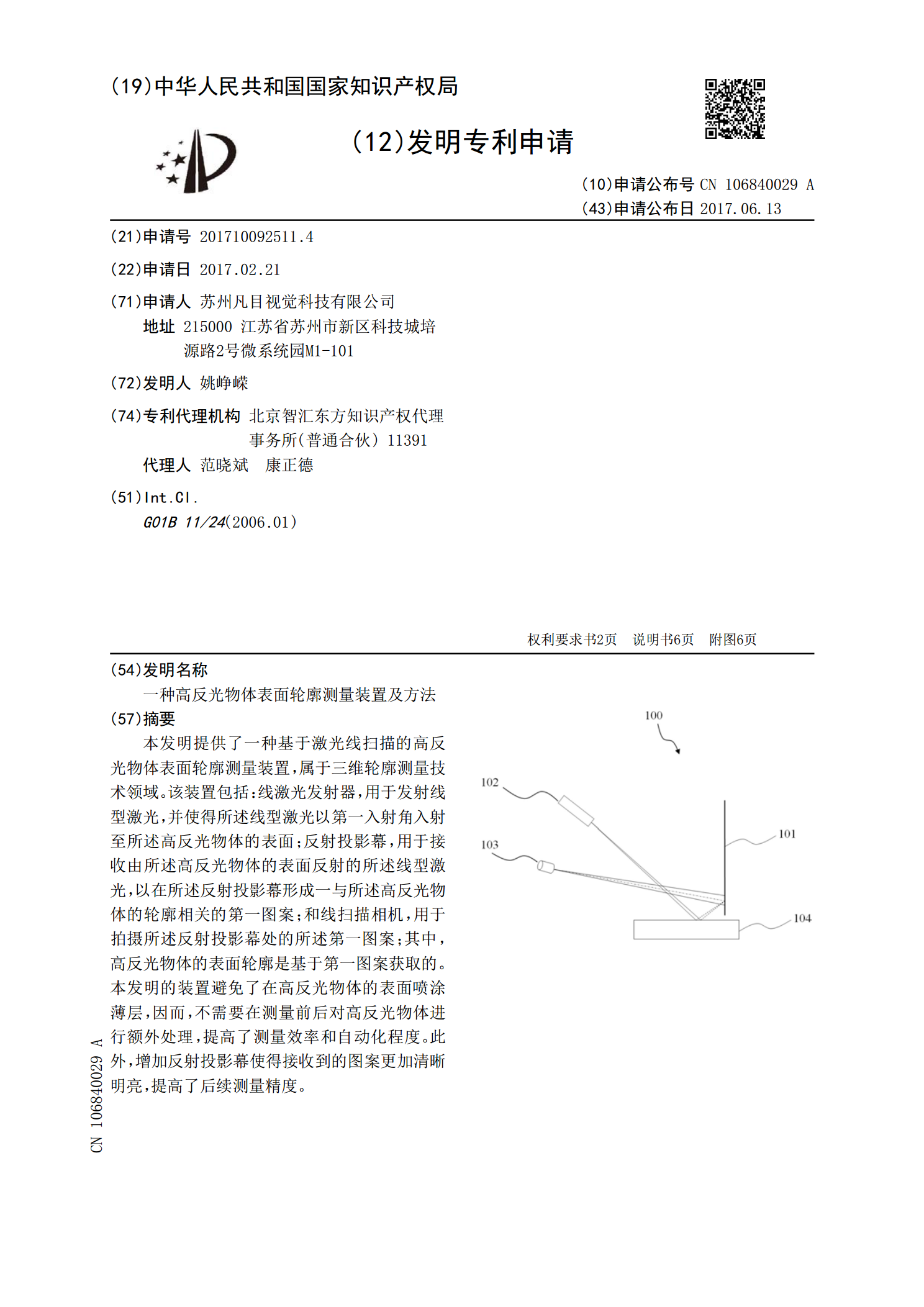
本发明提供了一种基于激光线扫描的高反光物体表面轮廓测量装置,属于三维轮廓测量技术领域。该装置包括:线激光发射器,用于发射线型激光,并使得所述线型激光以第一入射角入射至所述高反光物体的表面;反射投影幕,用于接收由所述高反光物体的表面反射的所述线型激光,以在所述反射投影幕形成一与所述高反光物体的轮廓相关的第一图案;和线扫描相机,用于拍摄所述反射投影幕处的所述第一图案;其中,高反光物体的表面轮廓是基于第一图案获取的。本发明的装置避免了在高反光物体的表面喷涂薄层,因而,不需要在测量前后对高反光物体进行额外处理,提

一种基于相位特性的物体轮廓检测方法.pdf
本发明属于机器视觉技术领域,公开了一种基于相位特性的物体轮廓检测方法。本发明是针对非经典感受野抑制轮廓检测方法在图像低对比度处的轮廓难以提取的问题而提出的,具体包括如下步骤:滤波处理,制取特征图,制取边缘保留平滑滤波后的特征图,制取非经典感受野抑制后的轮廓图像,二值化处理。本发明的轮廓检测方法利用了图像的相位特性,借助图像相位信息的稳定性和重要性,保证了特征的完整性,使得轮廓检测不受图像亮度不一致或对比度改变的影响;并且结合了人类视觉机制中的非经典感受野特性,有效区分了目标轮廓和纹理边缘,并对纹理进行了抑

一种基于相位特性的物体轮廓检测方法.pdf
本发明属于机器视觉技术领域,公开了一种基于相位特性的物体轮廓检测方法。本发明是针对非经典感受野抑制轮廓检测方法在图像低对比度处的轮廓难以提取的问题而提出的,具体包括如下步骤:滤波处理,制取特征图,制取边缘保留平滑滤波后的特征图,制取非经典感受野抑制后的轮廓图像,二值化处理。本发明的轮廓检测方法利用了图像的相位特性,借助图像相位信息的稳定性和重要性,保证了特征的完整性,使得轮廓检测不受图像亮度不一致或对比度改变的影响;并且结合了人类视觉机制中的非经典感受野特性,有效区分了目标轮廓和纹理边缘,并对纹理进行了抑