
相位测量轮廓术中相位误差过补偿与欠补偿的解决方法.pdf

韶敏****ab


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
相位测量轮廓术中相位误差过补偿与欠补偿的解决方法.pdf
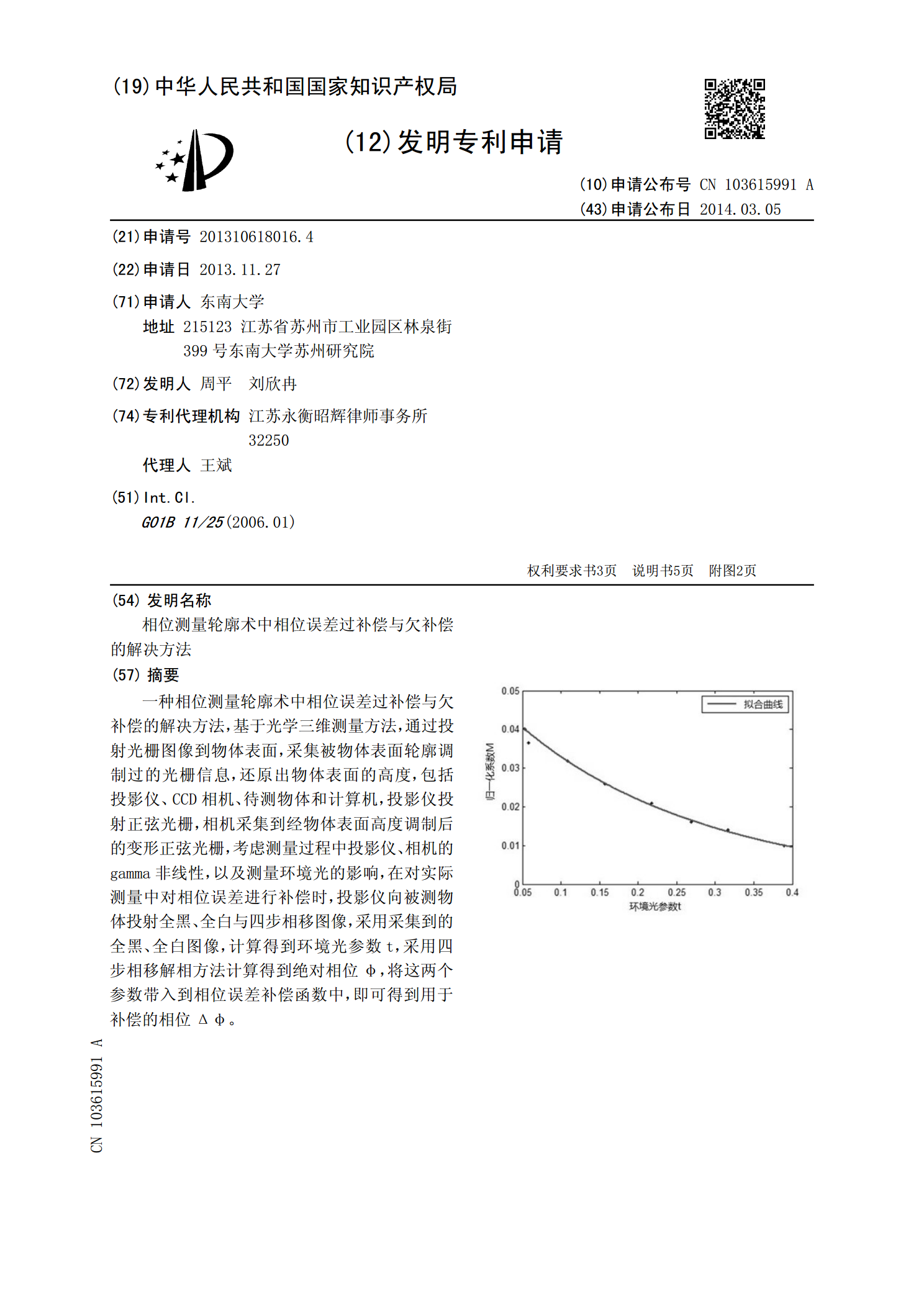
一种相位测量轮廓术中相位误差过补偿与欠补偿的解决方法,基于光学三维测量方法,通过投射光栅图像到物体表面,采集被物体表面轮廓调制过的光栅信息,还原出物体表面的高度,包括投影仪、CCD相机、待测物体和计算机,投影仪投射正弦光栅,相机采集到经物体表面高度调制后的变形正弦光栅,考虑测量过程中投影仪、相机的gamma非线性,以及测量环境光的影响,在对实际测量中对相位误差进行补偿时,投影仪向被测物体投射全黑、全白与四步相移图像,采用采集到的全黑、全白图像,计算得到环境光参数t,采用四步相移解相方法计算得到绝对相位φ,

数字相移测量中的高精度相位误差补偿.docx
数字相移测量中的高精度相位误差补偿摘要:数字相移测量的主要误差来源于由数字投影机引入的Gamma(γ)畸变。投影范围内的γ非一致性使得基于单一γ的校正技术和相位误差补偿技术存在较大残余误差。在分析γ非均匀分布的基础上提出了基于像素的相位误差查找表补偿方法。该方法根据像素自身的γ动态地建立相应的相位误差查找表进行相位误差补偿有效提高了补偿精度。对实际测量结果做了分析并与基于单一γ的方法进行了比较证明了基于像素的相位误差查找表补偿方法能够获得更高的精度。关键词:相移
数字相移测量中的高精度相位误差补偿.docx
数字相移测量中的高精度相位误差补偿摘要:数字相移测量的主要误差来源于由数字投影机引入的Gamma(γ)畸变。投影范围内的γ非一致性使得基于单一γ的校正技术和相位误差补偿技术存在较大残余误差。在分析γ非均匀分布的基础上提出了基于像素的相位误差查找表补偿方法。该方法根据像素自身的γ动态地建立相应的相位误差查找表进行相位误差补偿有效提高了补偿精度。对实际测量结果做了分析并与基于单一γ的方法进行了比较证明了基于像素的相位误差查找表补偿方法能够获得更高的精度。关键词:相移

结构光测量相位波动误差补偿方法研究.docx
结构光测量相位波动误差补偿方法研究标题:结构光测量相位波动误差补偿方法研究摘要:结构光测量是一种常用的非接触式三维形貌测量方法,广泛应用于工业制造、材料科学、医学等领域。然而,在实际应用中,由于环境噪声、系统误差等因素,结构光测量中常常存在相位波动误差,导致测量精度下降。因此,研究结构光测量相位波动误差的补偿方法具有重要的理论和实践意义。本论文综述了国内外关于结构光测量相位波动误差补偿方法的研究进展,分析了各种补偿方法的优缺点,并提出了一种改进方法,通过实验验证了改进方法的有效性和可行性。关键词:结构光测

一种物体表面轮廓测量中的相位补偿方法.pdf
一种物体表面轮廓测量中的相位补偿方法,基于结构光相移法对物体表面轮廓进行测量,由数字投影仪向作为被测物体的参考平面投射相移光栅,由数字相机采集投射到参考平面上的相移光栅,获得图像系列;依据相移法原理对获得的图像系列进行解相处理,获得表征参考平面轮廓的相位分布,随机选取相位分布的递增方向的N条相位数据作为实际相位分布数据集,用实际相位分布数据集减去相移光栅的已知相位分布,得到相位补偿误差数据集,采用正弦和函数对实际相位分布数据集与相位补偿误差数据集进行曲线拟合,进行相位补偿,以提高物体表面轮廓测量系统的测量