
采用齿面修形的斜齿轮行星传动系统.pdf

光誉****君哥


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

采用齿面修形的斜齿轮行星传动系统.pdf
采用齿面修形的斜齿轮行星传动系统,包括内斜齿轮副和外斜齿轮副两种啮合传动的齿轮。所述行星传动系统中的外斜齿轮采用经过齿面修形的非渐开线齿形,而内斜齿轮仍采用标准渐开线齿形。本发明包括平行轴传动的内、外两种斜齿轮副,由于外斜齿轮是用成形磨削法修形的齿轮,使得该齿轮副啮合时出现含有一定量传动误差的“局部共轭”现象,施加载荷后,可以有效地减小行星齿轮传动的振动和噪声,从而提升我国高速重载行星齿轮减(增)速器的整体性能。
齿向修形斜齿轮蜗杆砂轮磨削时齿面扭曲补偿方法.pdf
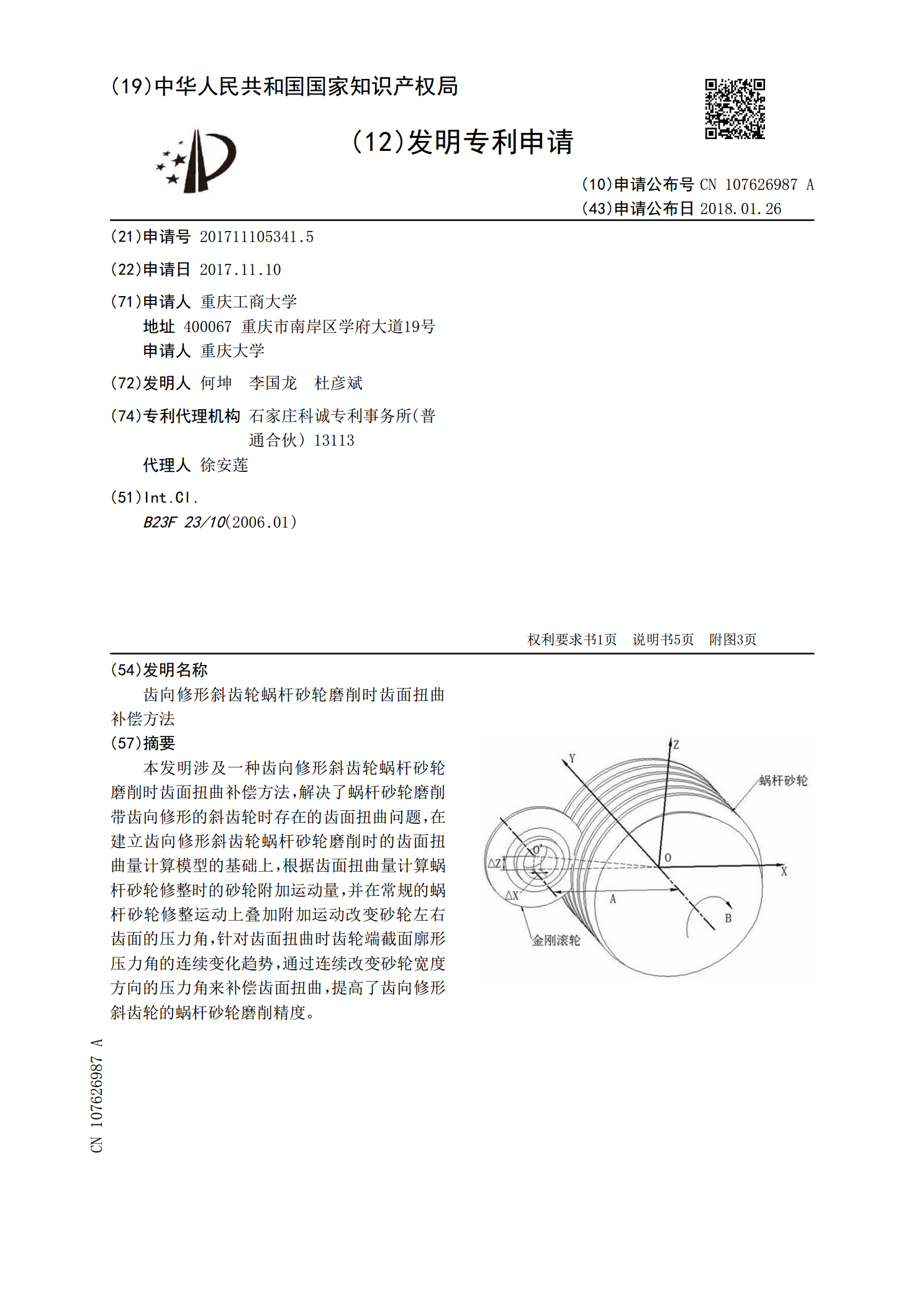
本发明涉及一种齿向修形斜齿轮蜗杆砂轮磨削时齿面扭曲补偿方法,解决了蜗杆砂轮磨削带齿向修形的斜齿轮时存在的齿面扭曲问题,在建立齿向修形斜齿轮蜗杆砂轮磨削时的齿面扭曲量计算模型的基础上,根据齿面扭曲量计算蜗杆砂轮修整时的砂轮附加运动量,并在常规的蜗杆砂轮修整运动上叠加附加运动改变砂轮左右齿面的压力角,针对齿面扭曲时齿轮端截面廓形压力角的连续变化趋势,通过连续改变砂轮宽度方向的压力角来补偿齿面扭曲,提高了齿向修形斜齿轮的蜗杆砂轮磨削精度。

斜齿圆柱齿轮齿面数学模型与修形研究.docx
斜齿圆柱齿轮齿面数学模型与修形研究斜齿圆柱齿轮是一种常见的机械传动元件,它由多个齿面组成,通过齿间的啮合运动实现转动的传递。在实际工程应用中,由于制造和使用过程中存在各种因素的影响,斜齿圆柱齿轮的齿面可能会出现一些不理想的形状,从而影响其使用性能和寿命。因此,研究斜齿圆柱齿轮的齿面数学模型和修形方法对于提高齿轮的性能具有重要意义。首先,我们来看斜齿圆柱齿轮的齿面数学模型。斜齿圆柱齿轮的齿面主要包括两个关键参数:模数和齿轮厚度。模数是指齿轮齿面的尺寸比例,一般通过工程要求和设计需求确定。齿轮厚度是指齿轮的厚

同功重比修形斜齿和直齿面齿轮性能对比研究.docx
同功重比修形斜齿和直齿面齿轮性能对比研究近年来,同功重比修形斜齿和直齿面齿轮的研究日益受到重视。这两种齿轮的特征不仅在于其齿形的不同,更在于在不同应用环境中的性能表现。本文将从齿轮的定义、同功重比修形斜齿和直齿面齿轮的构成及其性能对比等方面进行探讨和分析。一、齿轮的定义齿轮是指由两个或多个齿数不同的圆盘组成的传动装置,在实际的机械运动中起着非常重要的作用。常见的齿轮主要分为斜齿轮、直齿轮、锥齿轮等,其中斜齿轮和直齿轮是常见的两种齿轮。二、同功重比修形斜齿和直齿面齿轮的构成同功重比修形斜齿和直齿面齿轮均由齿

齿向修形斜齿轮成形磨削时齿面原理性误差建模方法.pdf
本发明公开了一种齿向修形斜齿轮成形磨削时齿面原理性误差建模方法,根据接触线形态、X轴附加移动及C轴附加转动三个误差来源,分别建立齿面误差模型,在实际齿向修形齿轮加工过程中,根据实际的砂轮与齿轮的接触线形态及X、C轴的附加运动量分别计算齿面误差,所有误差的叠加构成实际齿面的原理性误差;本发明对修形齿面的原理性误差进行精确建模,提高了齿向修形齿轮的成形磨削精度。