
基于V2X的道路交叉口车-车避撞预警算法研究.docx

骑着****猪猪


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于V2X的道路交叉口车-车避撞预警算法研究.docx
基于V2X的道路交叉口车-车避撞预警算法研究基于V2X的道路交叉口车-车避撞预警算法研究摘要:随着智能交通系统的不断发展,车辆-车辆(V2V)和车辆-基础设施(V2I)通信技术(V2X)已经成为实现交通安全和效率的重要手段之一。本文以道路交叉口的车-车避撞预警为研究对象,通过分析交通事故的特点和交叉口的运行机制,提出了一种基于V2X的避撞预警算法,并通过仿真和实验证明了其有效性。1.引言道路交叉口是交通事故频发的地点,因为交汇于此的车流量大、车辆运行速度快,各个方向交叉运动容易导致车辆相撞。因此,开发一种

基于V2X的道路交叉口车-车避撞预警算法研究的任务书.docx
基于V2X的道路交叉口车-车避撞预警算法研究的任务书任务书一、研究背景和意义在近年来,随着车辆数量的增加和城市化程度的提高,道路交通拥堵、交通事故频发等问题也逐渐凸显。其中,交通事故是交通运输事故中最为常见、也是影响最大的一个问题。为了减少交通事故的发生,目前很多国家都已经在道路上安装了红绿灯,但是这种方式虽然可以控制道路车流的流量和方向,却无法有效预防车辆发生交通事故。随着通讯技术、无线通信技术等领域的快速发展,基于车联网技术的道路交通安全解决方案成为了解决这一重点问题的热门方案。基于车间通信技术,车辆

基于滑模控制的车车协同主动避撞算法.docx
基于滑模控制的车车协同主动避撞算法基于滑模控制的车车协同主动避撞算法摘要:随着交通工具的增多和道路交通的复杂性,车辆之间的碰撞事故成为道路安全的重要问题。为了解决这一问题,本文提出了一种基于滑模控制的车车协同主动避撞算法。该算法利用车辆之间的通信和传感器信息,实现实时的协同避撞决策和控制。通过理论证明和仿真实验,证明该算法具有较高的避撞准确度和稳定性。关键词:滑模控制;车车协同;主动避撞;算法1.引言随着汽车数量的快速增长,交通安全问题日益突出。根据统计数据,车辆碰撞事故是造成交通事故的主要原因之一。为了
基于V2X的智能汽车交叉口自动紧急避撞控制方法.pdf
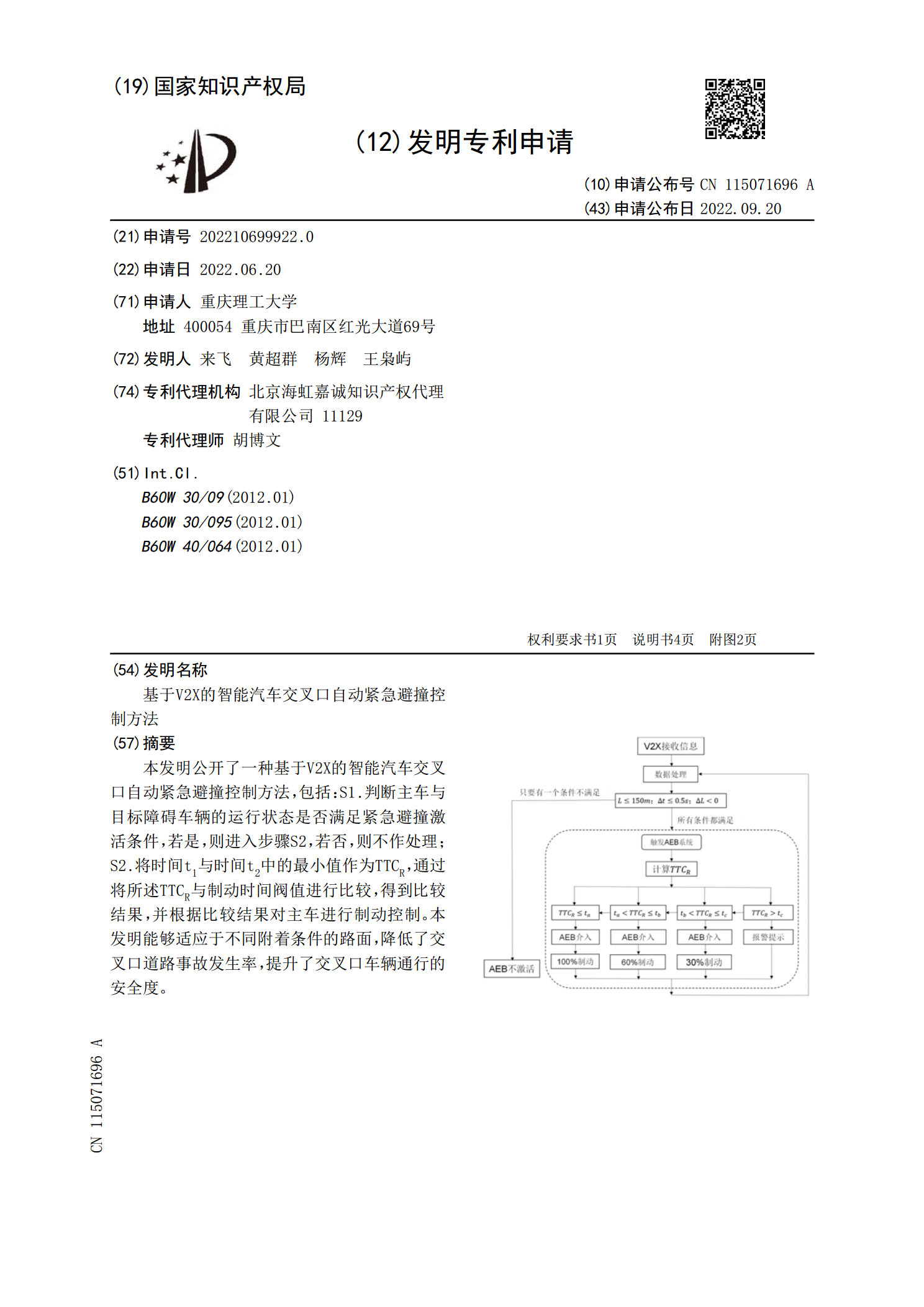
本发明公开了一种基于V2X的智能汽车交叉口自动紧急避撞控制方法,包括:S1.判断主车与目标障碍车辆的运行状态是否满足紧急避撞激活条件,若是,则进入步骤S2,若否,则不作处理;S2.将时间t<base:Sub>1</base:Sub>与时间t<base:Sub>2</base:Sub>中的最小值作为TTC<base:Sub>R</base:Sub>,通过将所述TTC<base:Sub>R</base:Sub>与制动时间阀值进行比较,得到比较结果,并根据比较结果对主车进行制动控制。本发明能够适应于不同附着条件

预警时间对信控交叉口避撞驾驶行为的影响研究.docx
预警时间对信控交叉口避撞驾驶行为的影响研究预警时间对信控交叉口避撞驾驶行为的影响研究摘要:随着交通道路拥挤程度的增加,信控交叉口成为交通事故的高发区域。为了提高在信控交叉口的驾驶行为,本论文旨在研究预警时间对信控交叉口避撞驾驶行为的影响。通过对一定数量的驾驶员进行驾驶模拟实验,分析他们在不同预警时间下的驾驶行为变化。结果表明,合理的预警时间可以显著改善驾驶员在信控交叉口的避撞行为,从而降低交通事故的发生率。关键词:信控交叉口;避撞驾驶行为;预警时间;实验研究引言信控交叉口是城市道路交通中最常见的路口形式之