
一种绳牵引墙壁提升载运并联机构.pdf

一吃****永贺


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种绳牵引墙壁提升载运并联机构.pdf
一种绳牵引墙壁提升载运并联机构,涉及一种用于建工行业和墙壁维护作业中的载运机构。设有装载吊篮、2组有配重驱动、2组无配重驱动和2个配重块。装载吊篮上设有吊耳。有配重驱动布置在装载吊篮的侧上方,有配重驱动模块包括驱动电机、减速器、摩擦卷筒、定滑轮、支架和钢丝绳等,钢丝绳穿过带有螺旋沟槽的摩擦卷筒和定滑轮,绳头两端分别与吊耳和配重块相连接。无配重驱动模块布置在装载吊篮侧下方,包括驱动电机、减速器、绕线卷筒、定滑轮、支架和钢丝绳等,钢丝绳一端缠绕在带有螺旋沟槽卷筒上,另一端穿过定滑轮与吊耳相连接。另外两组驱动与
一种二自由度绳牵引并联机构.pdf
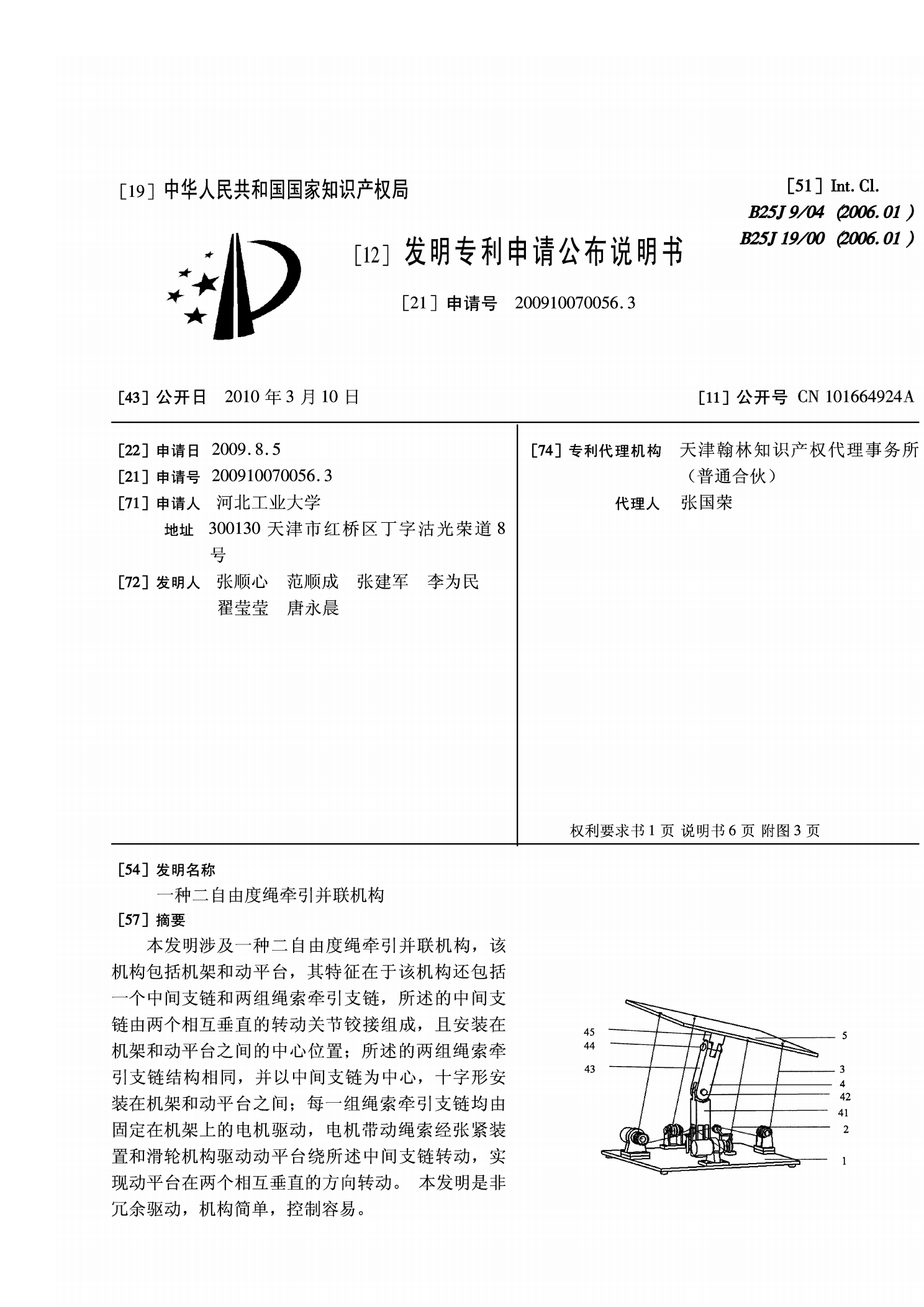
本发明涉及一种二自由度绳牵引并联机构,该机构包括机架和动平台,其特征在于该机构还包括一个中间支链和两组绳索牵引支链,所述的中间支链由两个相互垂直的转动关节铰接组成,且安装在机架和动平台之间的中心位置;所述的两组绳索牵引支链结构相同,并以中间支链为中心,十字形安装在机架和动平台之间;每一组绳索牵引支链均由固定在机架上的电机驱动,电机带动绳索经张紧装置和滑轮机构驱动动平台绕所述中间支链转动,实现动平台在两个相互垂直的方向转动。本发明是非冗余驱动,机构简单,控制容易。
风洞试验的绳牵引并联机构技术综述.pdf
第25卷第4期航空学报VoI.25No.42004年7月ACTAAERONAUTICAETASTRONAUTICASINICAuIy2004文章编号:1000-6893(2004)04-0393-08应用于飞行器风洞试验的绳牵引并联机构技术综述112刘雄伟,郑亚青,林麒(1.华侨大学先进制造技术研究所,福建泉州362021)(2.厦门大学机电工程系,福建厦门360005)OverviewofWire-drivenParallelKinematicManipulatorsforAircraftWindTun
一种六自由度末端可变形的并联绳牵引机构.pdf
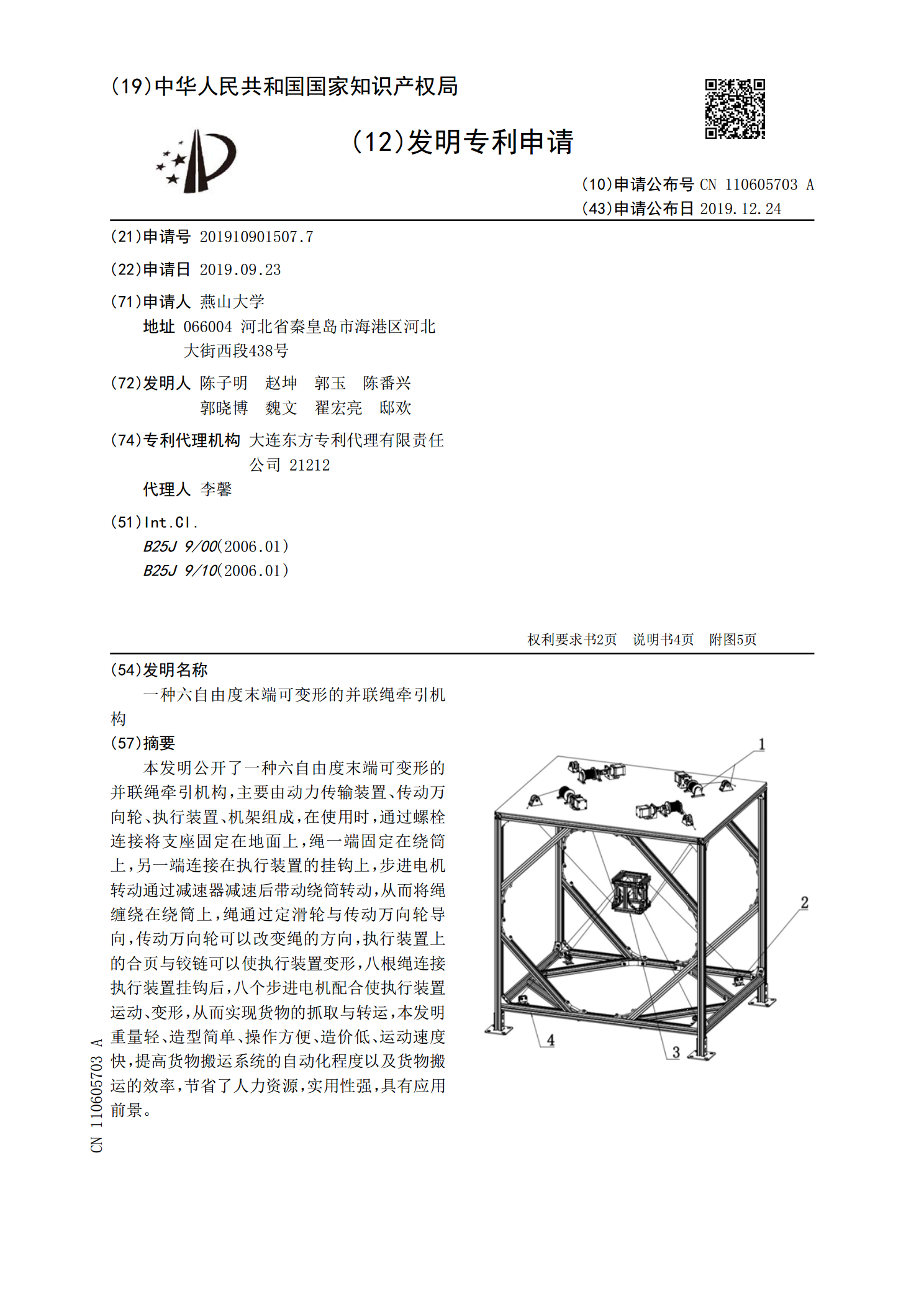
本发明公开了一种六自由度末端可变形的并联绳牵引机构,主要由动力传输装置、传动万向轮、执行装置、机架组成,在使用时,通过螺栓连接将支座固定在地面上,绳一端固定在绕筒上,另一端连接在执行装置的挂钩上,步进电机转动通过减速器减速后带动绕筒转动,从而将绳缠绕在绕筒上,绳通过定滑轮与传动万向轮导向,传动万向轮可以改变绳的方向,执行装置上的合页与铰链可以使执行装置变形,八根绳连接执行装置挂钩后,八个步进电机配合使执行装置运动、变形,从而实现货物的抓取与转运,本发明重量轻、造型简单、操作方便、造价低、运动速度快,提高货

绳牵引单轨吊导绳机构.pdf
本发明公开了一种绳牵引单轨吊导绳机构,所述机构导轮架主体、下滚轮总成、上滚轮总成、销轴、回绳轮总成、拉伸弹簧、偏心轴、回绳轮、导绳轮,所述下滚轮总成和上滚轮总成通过销轴与轮架主体连接,所述下滚轮总成和上滚轮总成之间设置有拉伸弹簧,所述下滚轮总成、上滚轮总成上分别设置有两个导绳轮,四个导绳轮之间通过偏心轴调节间隙,所述回绳轮总成通过螺栓设置在导轮架主体上,回绳轮总成上设置有两个回绳轮,两个回绳轮之间通过偏心轴调节间隙。本发明的导绳机构满足水平和竖直方向的钢丝绳引导,结构紧凑,布局合理,操作方便。