
双圆弧谐波机器人关节.pdf

一吃****瀚文


1/7

2/7

3/7
4/7
5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

双圆弧谐波机器人关节.pdf
双圆弧谐波机器人关节,涉及机器人制造技术领域,特别是机器人关节的设计技术领域。在关节外壳内连接一个刚性双圆弧齿轮,在所述刚性双圆弧齿轮内啮合一只柔性双圆弧杯状齿轮,在所述柔性双圆弧杯状齿轮内通过柔性轴承与双圆弧谐波减速器的波发生器连接,所述双圆弧谐波减速器的波发生器的控制端与一同步交流伺服电机的转子连接;在所述柔性双圆弧杯状齿轮的中心连接输出杆,所述输出杆间隙式穿置于所述关节外壳的一通孔中。本发明可以改善柔性双圆弧杯状齿轮齿根的应力状况和传动的啮合质量,提高机器人关节承载能力和扭转刚度。本发明具有平稳和准

双圆弧谐波减速器.pdf
本发明提供一种双圆弧谐波减速器,该种减速器具有结构紧凑、传递扭矩大、制造简单的特点。该双圆弧谐波减速器包括发生器、柔轮、刚轮和左、右壳体,右壳体安端在发生器轴的右侧并在两者配合处设有右轴承,带有内齿的刚轮设在左壳体内,柔轮前部套装在发生器上,柔轮前部带外齿并与刚轮内齿相耦合,所述柔轮后端内、外均装有轴承,柔轮后端内孔套装在发生器轴上,并在两者配合面装有左轴承;柔轮后部外圈套装于左壳体内,并在两者配合面装有柔性支撑轴承;所述柔轮外齿与刚轮内齿的齿型均采用双圆弧齿。
宽齿双圆弧谐波齿形.pdf
本发明公开了谐波减速器中柔轮和刚轮的齿廓,该齿廓为宽齿双圆弧谐波齿形。本发明齿形适合各类传动比的谐波减速器柔轮、刚轮齿廓加工,而且特别适合少齿、重载、中小传动比的谐波减速器齿廓,也适合结构紧凑型谐波减速器。该种齿形由于齿全高比较矮,便于了加工;同时柔轮工作段的齿比较厚,提高了柔轮齿部和根部的承载能力;另外由于柔轮径向变形小,一方面避免了柔轮和刚轮啮合过程中齿廓重叠干涉现象发生,另一方面提高了柔轮疲劳强度和柔性轴承的使用寿命;另一方面宽齿双圆弧谐波齿形可使谐波减速器更加紧凑从而减小了产品的体积和重量,提高了

双圆弧谐波齿廓设计方法.docx
双圆弧谐波齿廓设计方法双圆弧谐波齿廓设计方法引言齿轮传动作为机械传动中的一种重要形式,广泛应用于各种机器设备,如风力发电机组、重型机床等。齿轮在传动中发挥着重要的作用,其性能直接影响到传动的可靠性和效率。因此,齿轮设计的优化和制造的标准化是机器制造业发展的重点之一。谐波齿廓设计方法是齿轮设计过程中的一个重要环节,其设计目的是使齿轮传动过程中的谐波损失减小,从而降低传动噪声和振动。本文将介绍双圆弧谐波齿廓设计方法,以期为齿轮设计提供新的思路和方法。双圆弧谐波齿廓设计方法的基本原理双圆弧谐波齿廓设计方法是一种
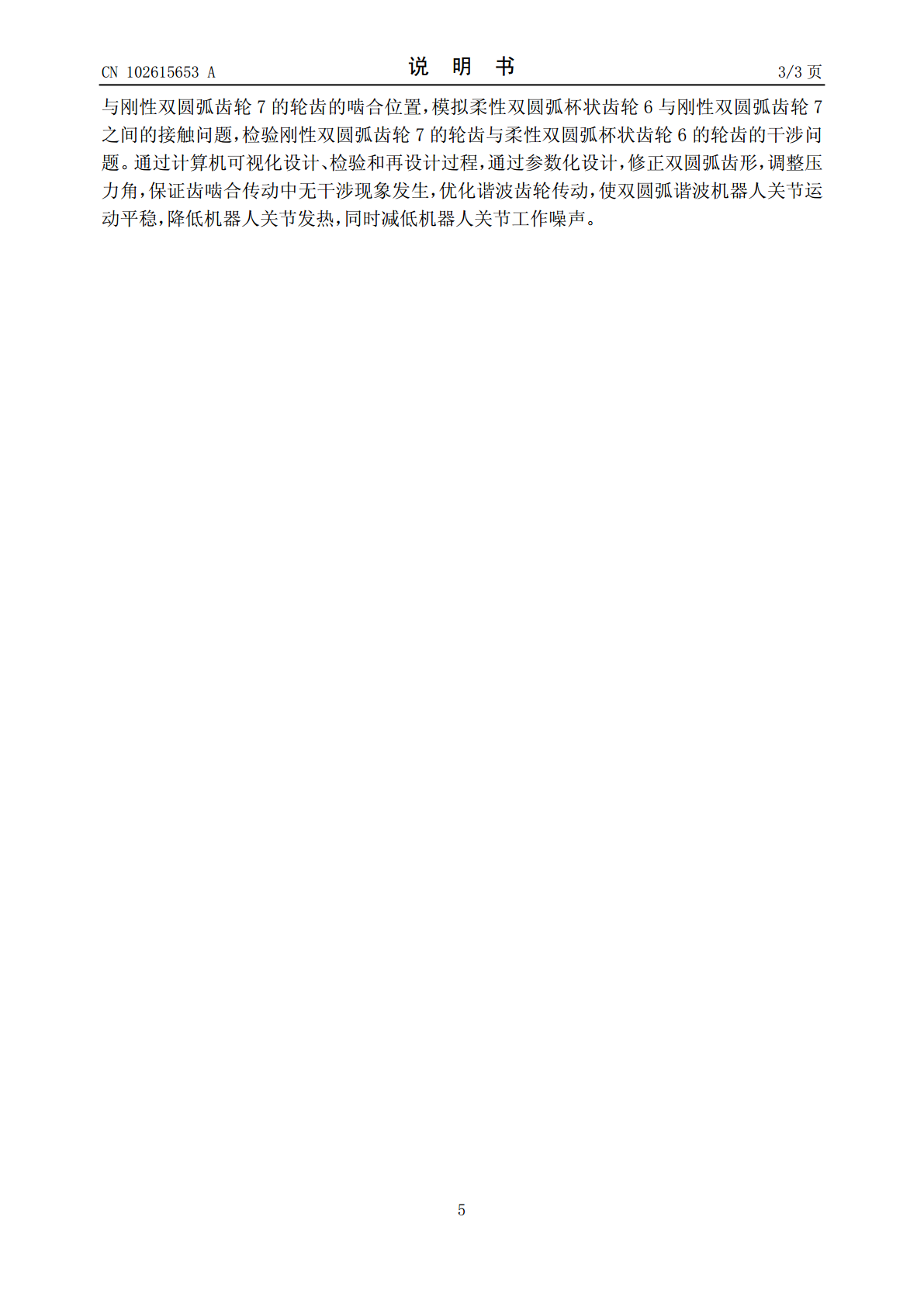
一种新型双圆弧谐波齿形.pdf
本发明公开了一种新型双圆弧谐波齿形,包括互相啮合的柔轮外齿和钢轮内齿,所述柔轮外齿的齿形为圆弧形,所述钢轮内齿的齿形与柔轮外齿齿形共轭,所述柔轮外齿和钢轮内齿的模数为0.2697,压力角为21.75°,所述柔轮外齿的齿数为160,钢轮内齿的齿数162。本发明的双圆弧齿形区别于传统的渐开线齿形,双圆弧齿形用圆弧段来替代渐开线,再加上对齿顶也进行修正操作,使得整个齿廓更为流畅,齿的承受能力也更强。