
四轮轮毂电机驱动车辆滑动转向控制策略.pdf

和裕****az

1/10

2/10

3/10
4/10

5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

四轮轮毂电机驱动车辆滑动转向控制策略.pdf
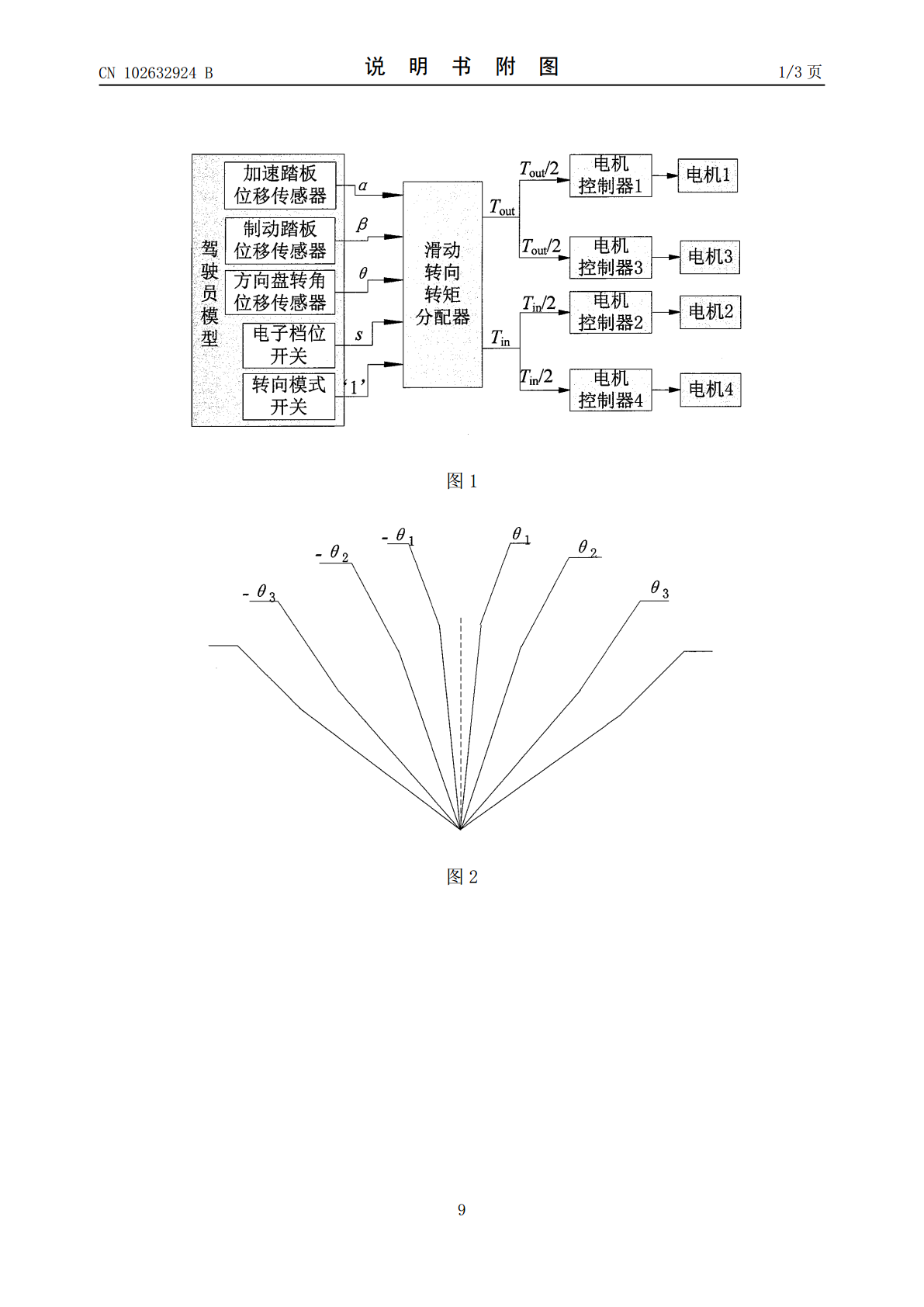
本发明针对已有的线控四轮转向的四轮轮毂电机驱动车辆,设计出一种可以实现滑动转向的控制策略。当转向系统失灵、运行空间受到限制或遇到特殊路面时可通过转向开关切换到滑动转向模式,综合电子控制器根据方向盘转角位移信号判断车辆的转向趋势,通过滑动转向转矩分配器直接控制四个轮毂电机的输出转矩,满足转向时两侧车轮之间的速差要求,从而实现不同转弯半径的滑动转向。本发明所述的滑动转向控制策略能够在已有的四轮转向基础上充分保证车辆的方向可控性。
用于轮毂驱动车辆的转向系统及轮毂驱动车辆.pdf
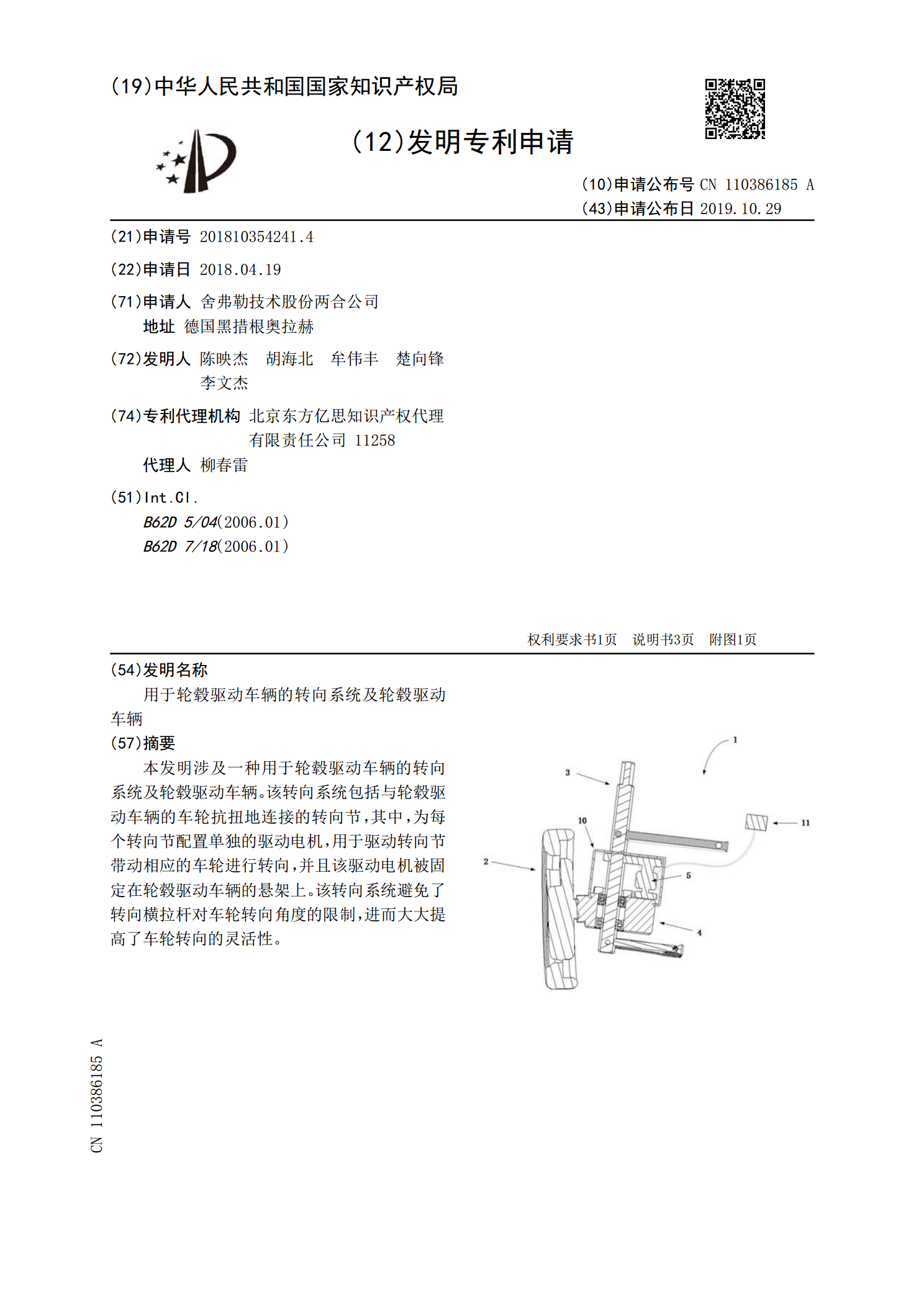
本发明涉及一种用于轮毂驱动车辆的转向系统及轮毂驱动车辆。该转向系统包括与轮毂驱动车辆的车轮抗扭地连接的转向节,其中,为每个转向节配置单独的驱动电机,用于驱动转向节带动相应的车轮进行转向,并且该驱动电机被固定在轮毂驱动车辆的悬架上。该转向系统避免了转向横拉杆对车轮转向角度的限制,进而大大提高了车轮转向的灵活性。

一种四轮毂电机驱动车辆转向的控制方法.pdf
本发明公开了一种四轮毂电机驱动车辆转向的控制方法,包括:获取驾驶员输入信号和车辆实际动力信息;计算期望车辆质心侧偏角、期望车辆横摆角速度和期望车速;计算质心侧偏角偏差、横摆角速度偏差和车速偏差;依据质心侧偏角偏差、横摆角速度偏差和车速偏差,采用PID控制算法和模糊PID控制算法,生成虚拟控制指令;建立车辆轮胎附着利用率目标函数和车辆能量消耗目标函数;依据虚拟控制指令和目标函数建立第一层转矩分配优化函数和第二层转矩分配优化函数;利用两层转矩分配优化函数为四个轮毂电机进行转矩分配,以控制车辆转向。本发明能够在
一种轮边/轮毂电机后轮驱动车辆转向控制方法及系统.pdf
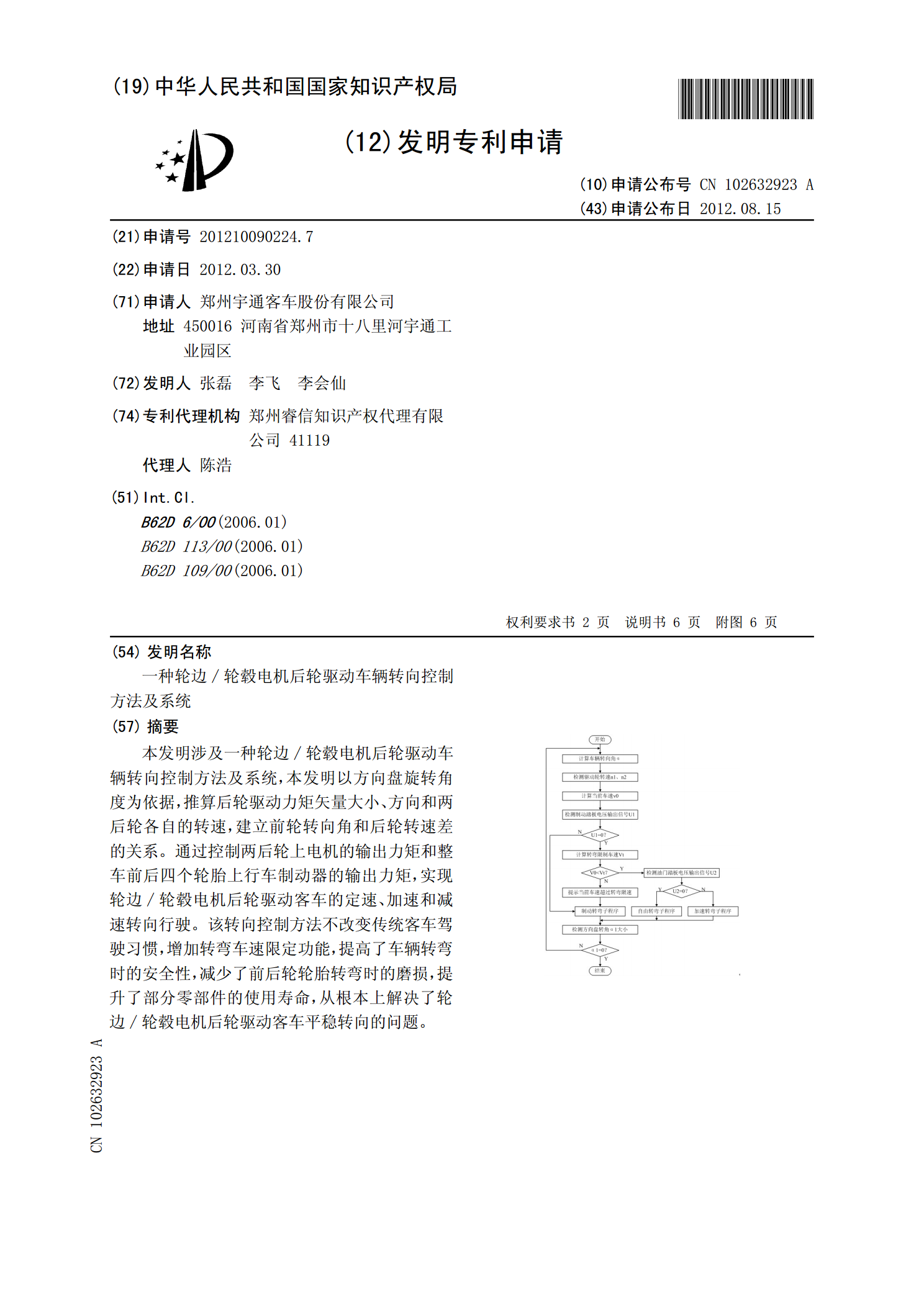
本发明涉及一种轮边/轮毂电机后轮驱动车辆转向控制方法及系统,本发明以方向盘旋转角度为依据,推算后轮驱动力矩矢量大小、方向和两后轮各自的转速,建立前轮转向角和后轮转速差的关系。通过控制两后轮上电机的输出力矩和整车前后四个轮胎上行车制动器的输出力矩,实现轮边/轮毂电机后轮驱动客车的定速、加速和减速转向行驶。该转向控制方法不改变传统客车驾驶习惯,增加转弯车速限定功能,提高了车辆转弯时的安全性,减少了前后轮轮胎转弯时的磨损,提升了部分零部件的使用寿命,从根本上解决了轮边/轮毂电机后轮驱动客车平稳转向的问题。
一种多轴轮毂电机驱动车辆后轮线控转向驱动装置及其转向方法.pdf
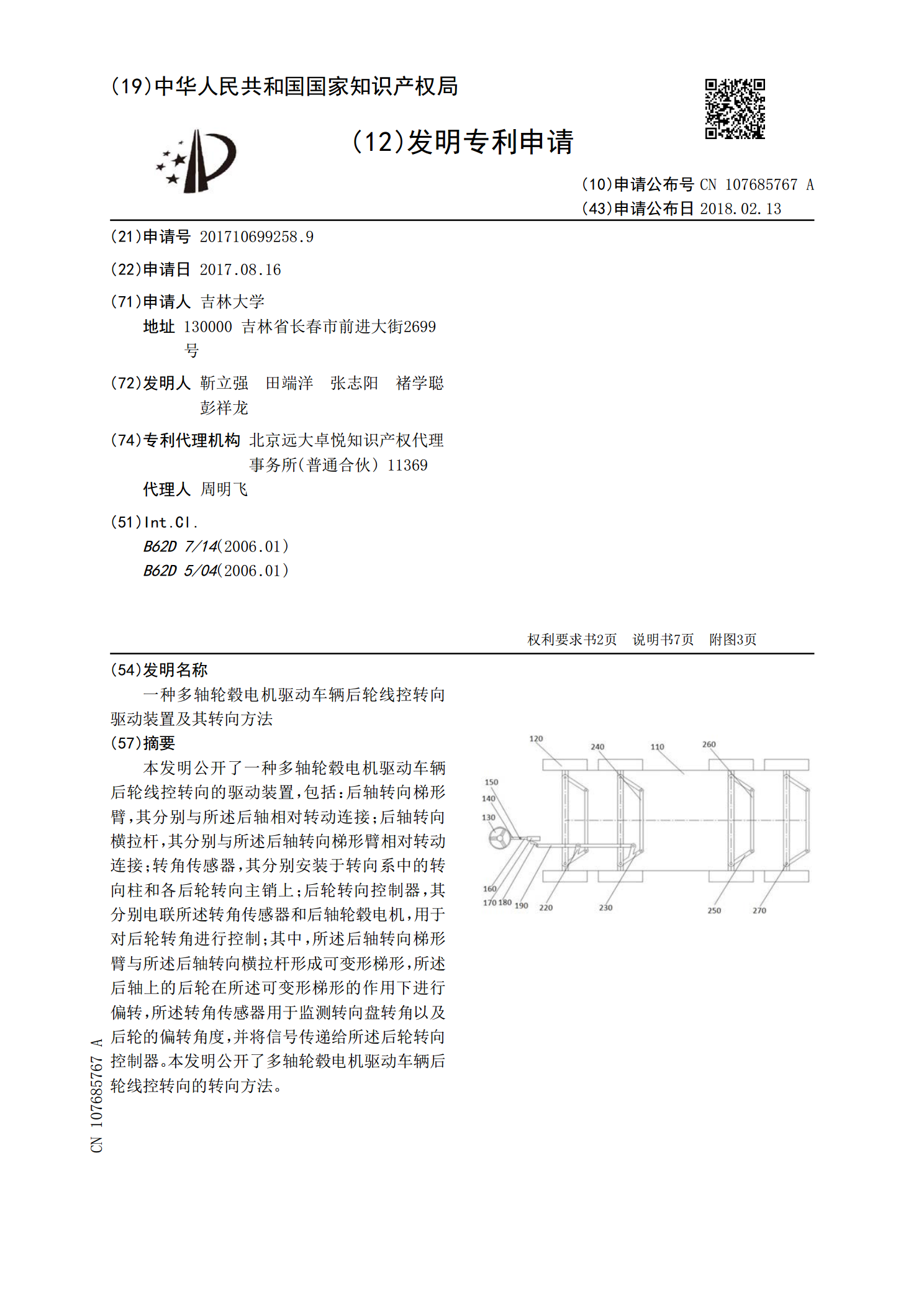
本发明公开了一种多轴轮毂电机驱动车辆后轮线控转向的驱动装置,包括:后轴转向梯形臂,其分别与所述后轴相对转动连接;后轴转向横拉杆,其分别与所述后轴转向梯形臂相对转动连接;转角传感器,其分别安装于转向系中的转向柱和各后轮转向主销上;后轮转向控制器,其分别电联所述转角传感器和后轴轮毂电机,用于对后轮转角进行控制;其中,所述后轴转向梯形臂与所述后轴转向横拉杆形成可变形梯形,所述后轴上的后轮在所述可变形梯形的作用下进行偏转,所述转角传感器用于监测转向盘转角以及后轮的偏转角度,并将信号传递给所述后轮转向控制器。本发明