
一种摩擦传动结构及过载可空转的齿轮传动装置.pdf

一条****淑淑


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种摩擦传动结构及过载可空转的齿轮传动装置.pdf
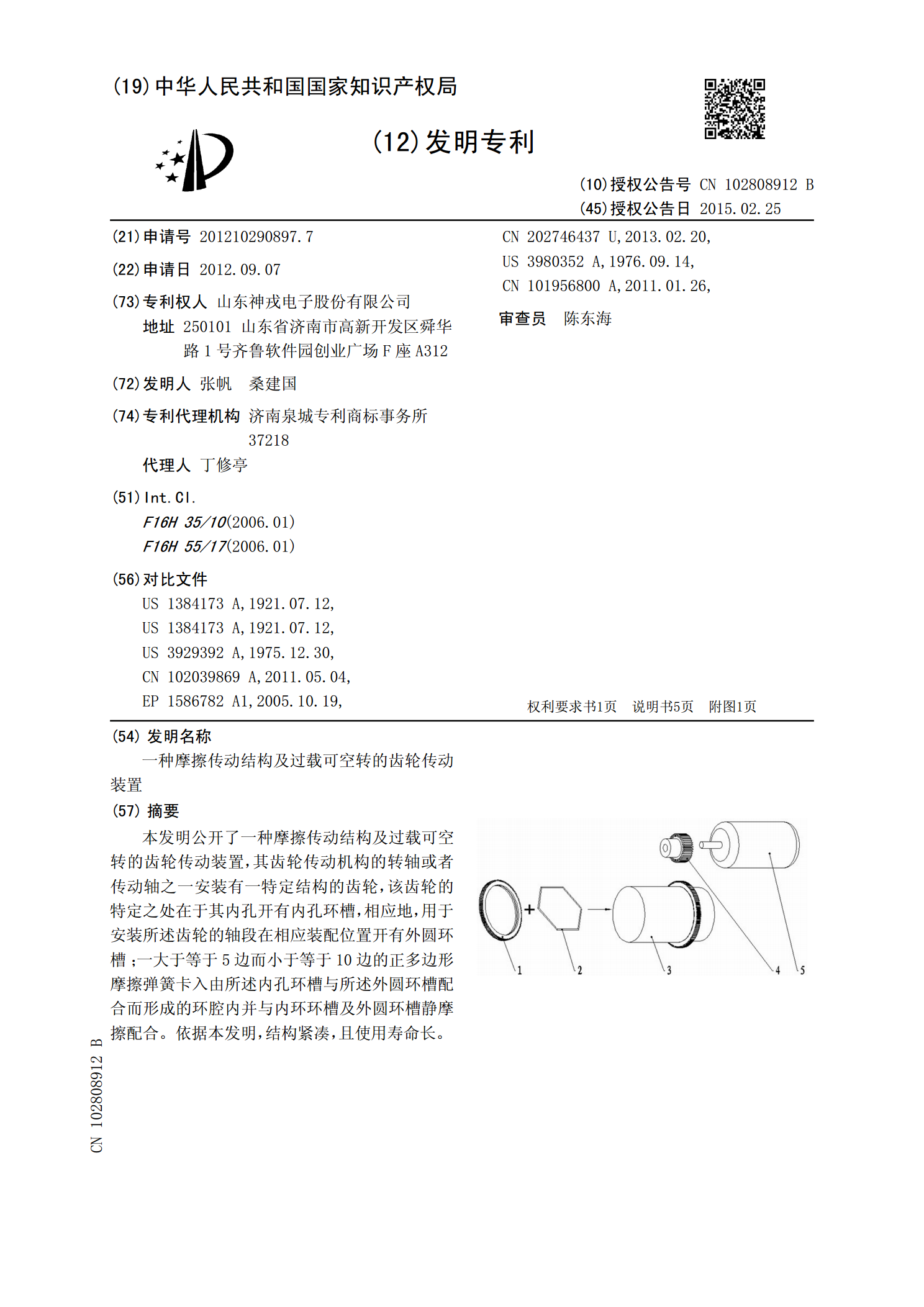
本发明公开了一种摩擦传动结构及过载可空转的齿轮传动装置,其齿轮传动机构的转轴或者传动轴之一安装有一特定结构的齿轮,该齿轮的特定之处在于其内孔开有内孔环槽,相应地,用于安装所述齿轮的轴段在相应装配位置开有外圆环槽;一大于等于5边而小于等于10边的正多边形摩擦弹簧卡入由所述内孔环槽与所述外圆环槽配合而形成的环腔内并与内环环槽及外圆环槽静摩擦配合。依据本发明,结构紧凑,且使用寿命长。

一种用于传动装置的齿轮结构.pdf
本发明提供了一种用于传动装置的齿轮结构,其结构由齿条、齿轮、横拉杆、转向轴组成,所述齿条与齿轮相互啮合,所述齿轮与横拉杆相连接,所述横拉杆上方设有转向轴,所述转向轴与传动装置中的动臂相连接。本发明的有益效果为本齿轮结构安装到机械传动装置中,使之能够做直线与转向运动,结构简单,成本低廉,转向灵敏,减少反应时长,提高生产效率,且体积小节约空间。
具有过载保护功能的齿轮传动结构.pdf
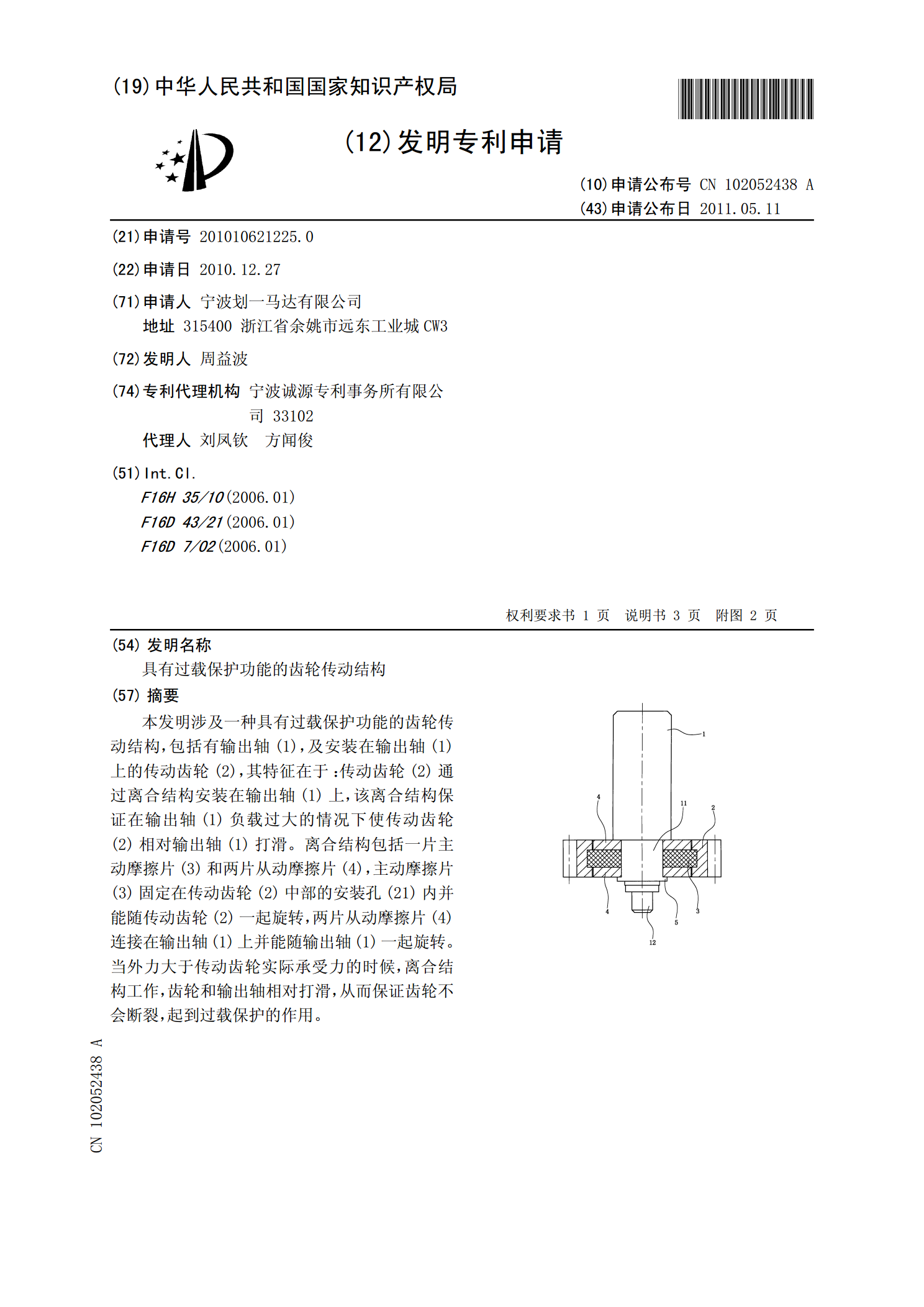
本发明涉及一种具有过载保护功能的齿轮传动结构,包括有输出轴(1),及安装在输出轴(1)上的传动齿轮(2),其特征在于:传动齿轮(2)通过离合结构安装在输出轴(1)上,该离合结构保证在输出轴(1)负载过大的情况下使传动齿轮(2)相对输出轴(1)打滑。离合结构包括一片主动摩擦片(3)和两片从动摩擦片(4),主动摩擦片(3)固定在传动齿轮(2)中部的安装孔(21)内并能随传动齿轮(2)一起旋转,两片从动摩擦片(4)连接在输出轴(1)上并能随输出轴(1)一起旋转。当外力大于传动齿轮实际承受力的时候,离合结构工作,

尤其用于行星齿轮传动装置的齿轮结构.pdf
本发明涉及一种齿轮结构,其带有第一齿轮元件、第二齿轮元件和用于同轴线地联接这两个齿轮元件的轴颈元件,其中,第一齿轮元件具有带有多个在周向上以第一齿距顺序排列的齿的第一齿环和带有第一内齿部的第一内部开口,第二齿轮元件具有带有多个在周向上以第二齿距顺序排列的齿的第二齿环和带有第二内齿部的第二内部开口,其中,轴颈元件具有带有与第一内齿部互补的轴颈外齿部的第一部段和带有与第二内齿部互补的轴颈外齿部的第二部段,并且这两个齿轮元件构造成在多个由于齿的周边错开而不同的拼接位置中能抗相对转动地安设到相应的轴颈外齿部上。本

具有降噪结构的齿轮及其齿轮传动装置.pdf
一种具有降噪结构的齿轮及其齿轮传动装置,其齿轮轮体上设置的降噪结构含一个与所述齿轮轮体端面相平行的微穿孔环形薄板,其环形内孔直径至少不小于所述的齿轮轮体的孔径;所述的微穿孔环形薄板上布有多个微小穿孔;一个连接固定边缘与所述的微穿孔环形薄板外缘相连,其外径至少不大于所述齿轮的齿根圆直径;所述的微穿孔环形薄板借助于所述的连接固定边缘固定到所述的齿轮轮体上;所述的微穿孔环形薄板的内表面与所述的齿轮轮体端面之间具有一个空腔;由此,形成一个密封的亥姆霍兹共振腔降噪结构;所述的齿轮传动装置采用上述齿轮。本发明结构简单