
一种实现高速运动的六自由度并联机械手.pdf

小宏****aa


1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种实现高速运动的六自由度并联机械手.pdf
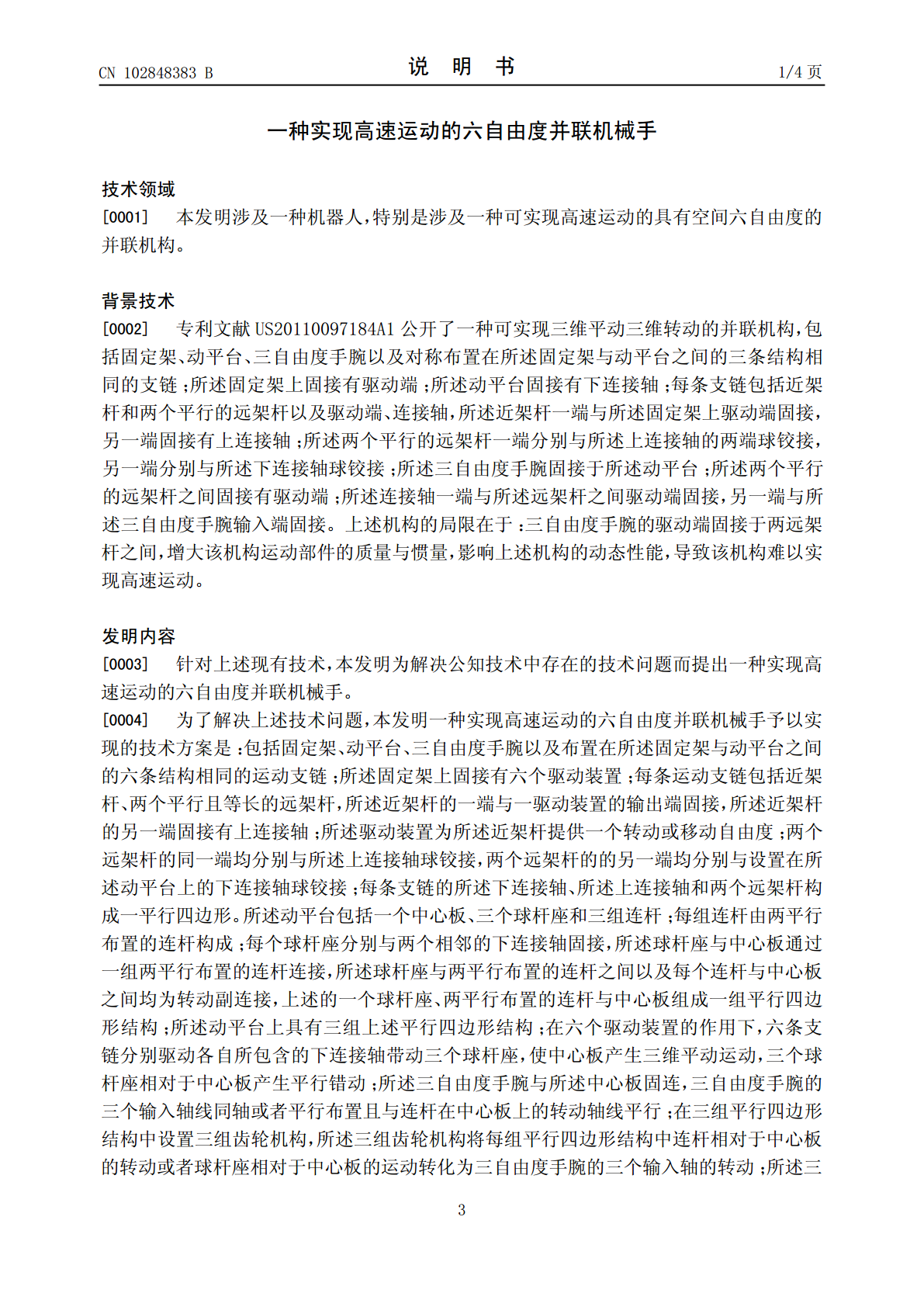
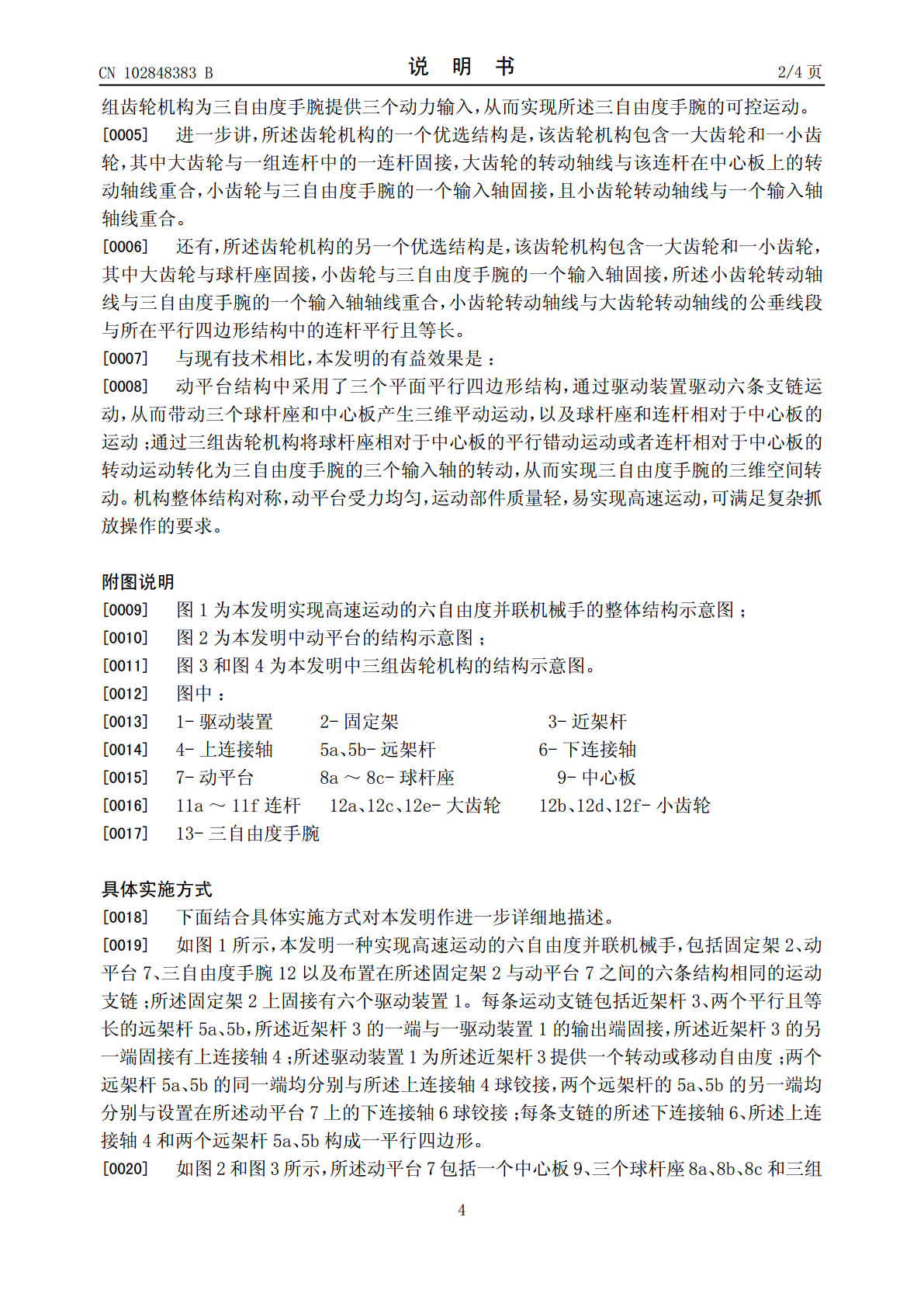
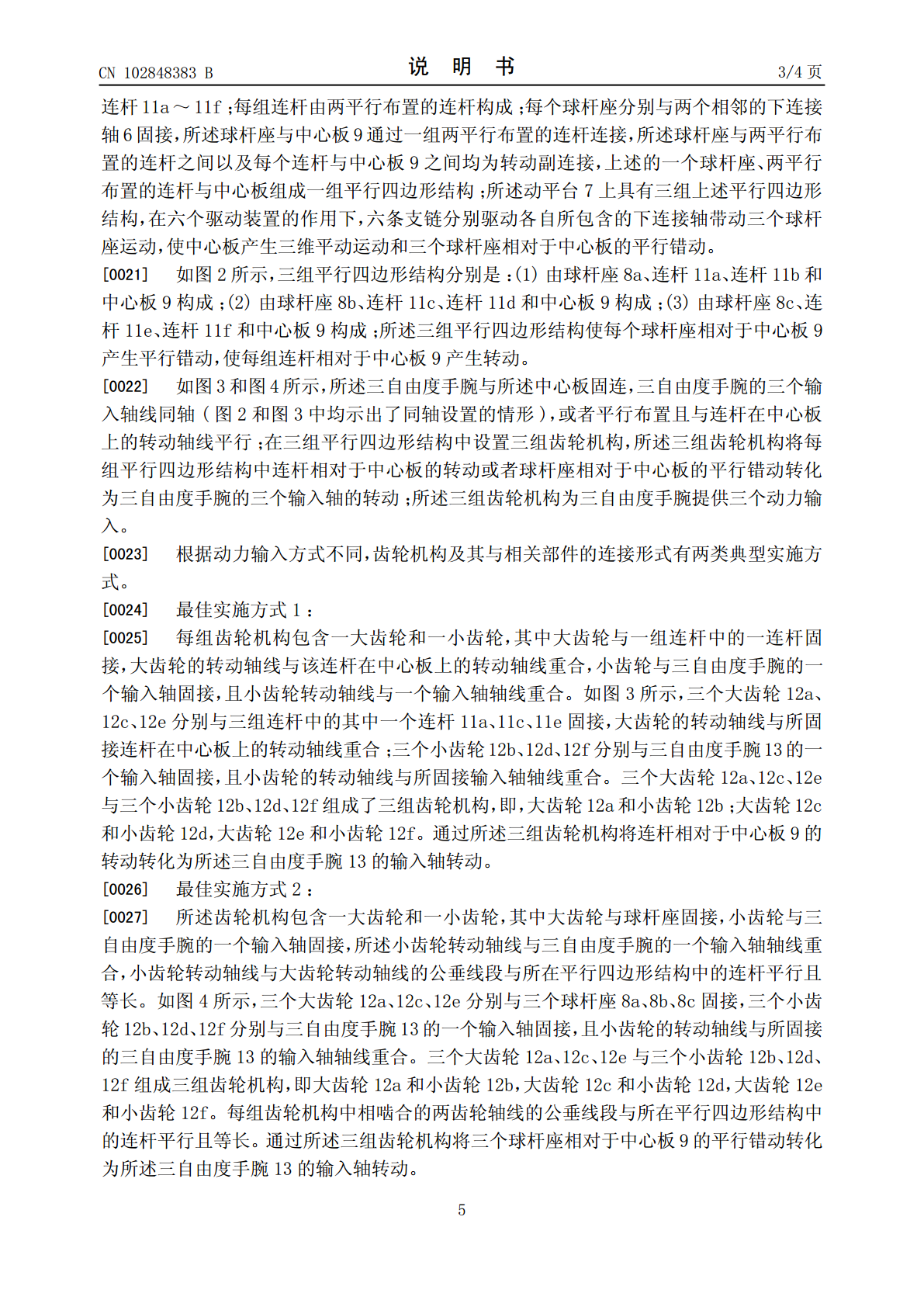
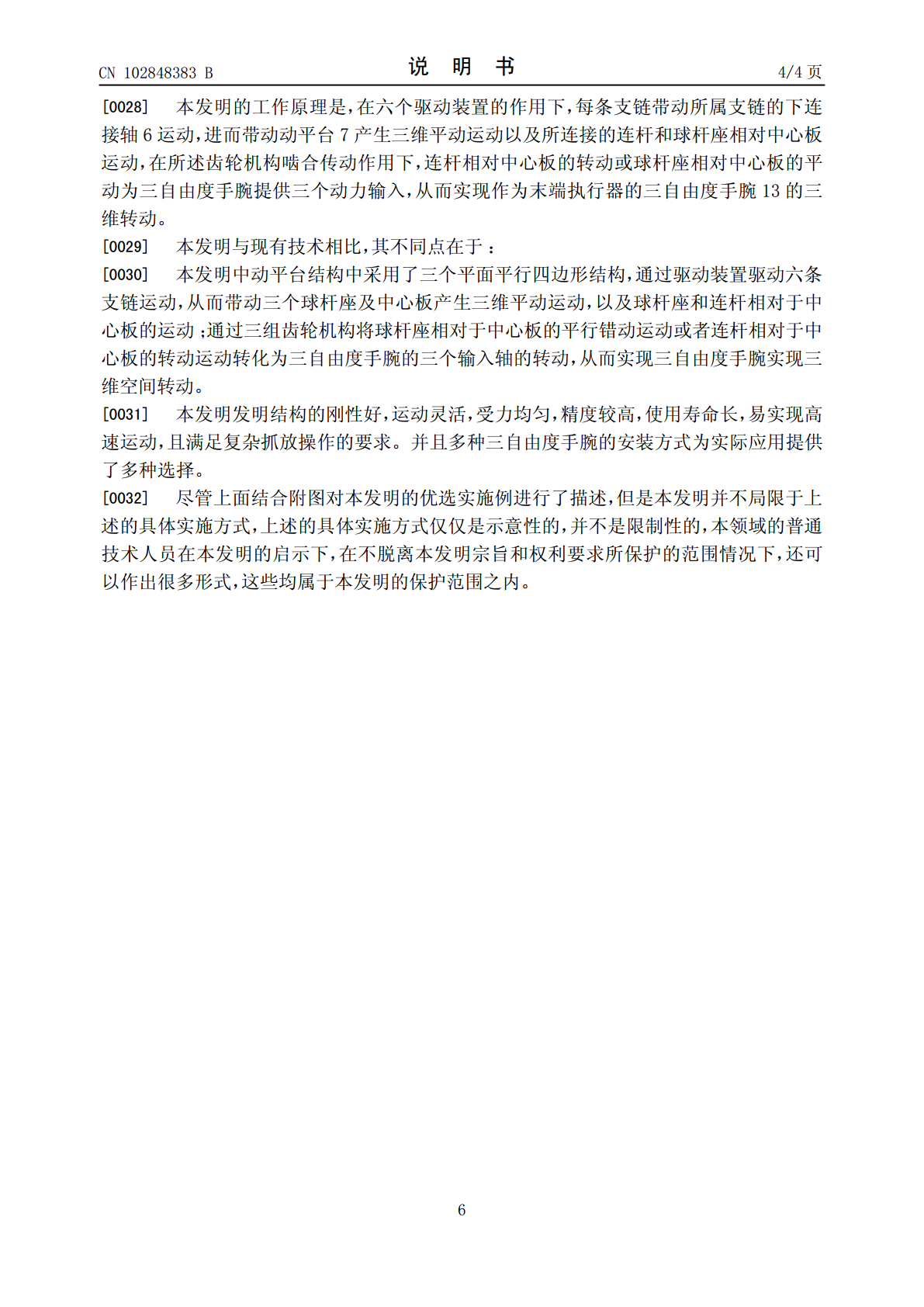
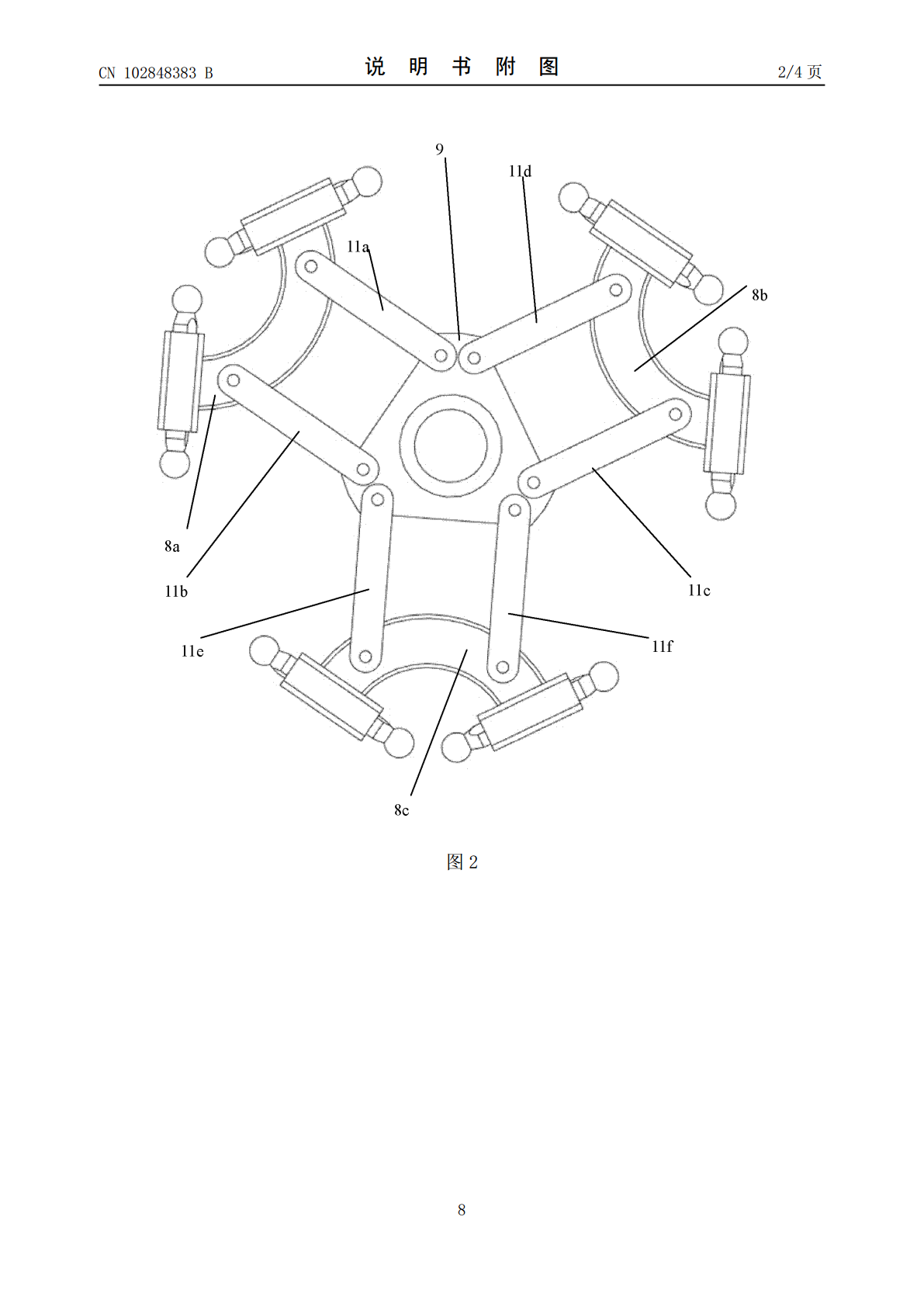
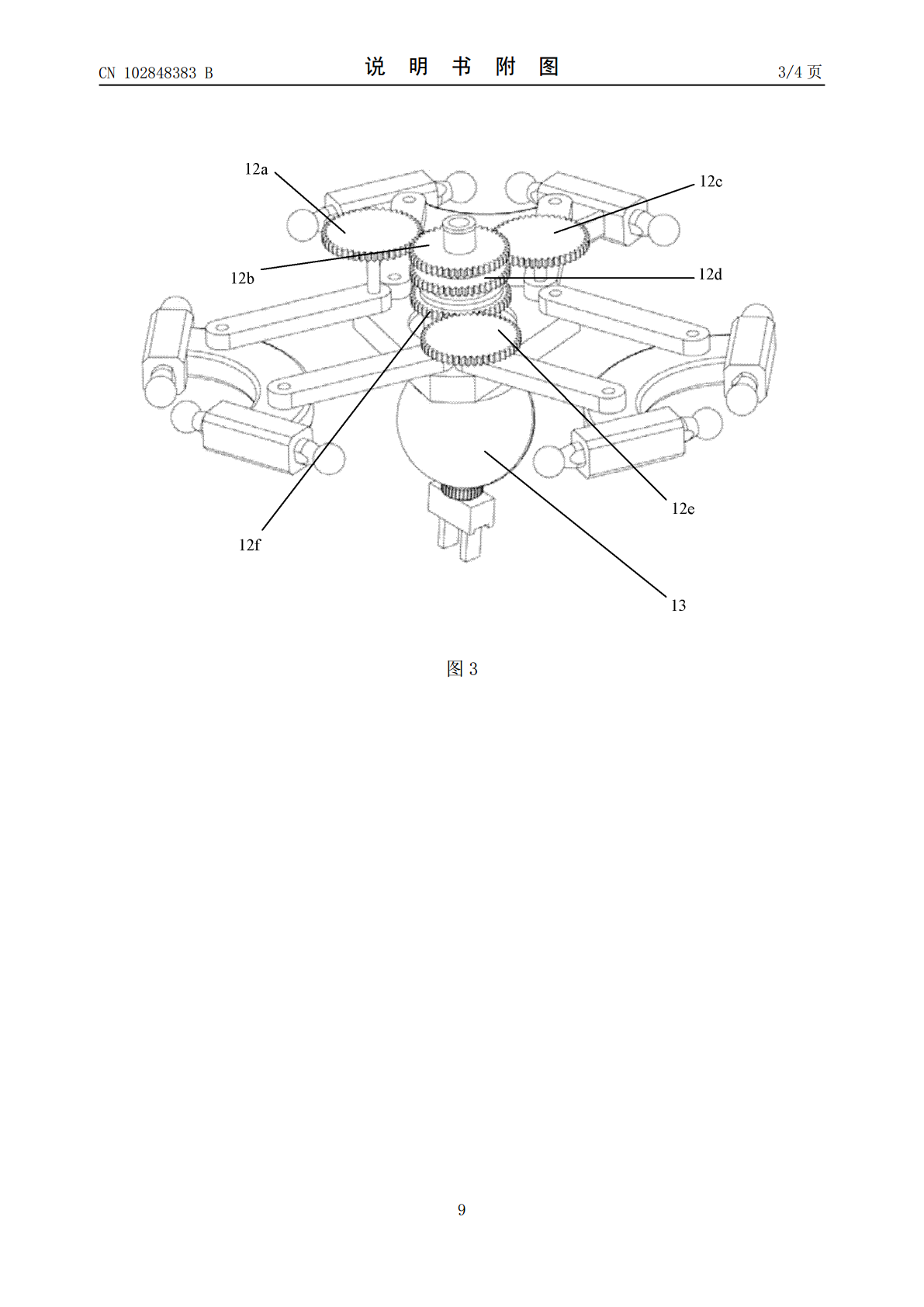
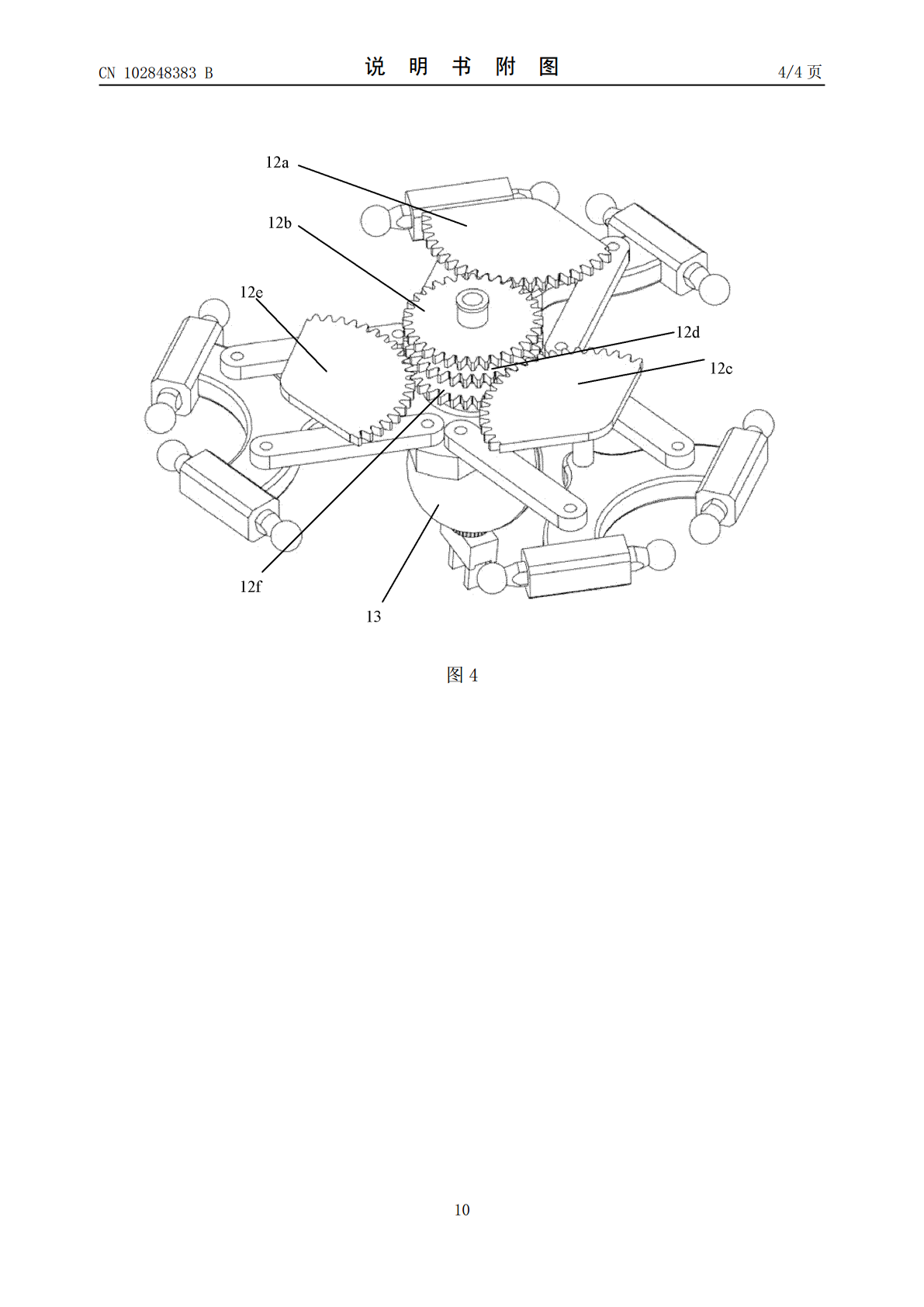
本发明公开了一种实现高速运动的六自由度并联机械手,包括固定架、动平台、三自由度手腕以及布置在固定架与动平台之间的六条结构相同的运动支链;动平台包括一个中心板、三个球杆座和三组连杆;每组连杆由两平行布置且等长的连杆构成;球杆座与中心板通过一组连杆转动连接,形成一组平行四边形结构;动平台上具有三组上述平行四边形结构;三自由度手腕与中心板固连,三自由度手腕的三个输入轴线同轴或者平行布置且与连杆在中心板上的转动轴线平行;在三组平行四边形结构中设置三组齿轮机构,将每组平行四边形结构中连杆相对于中心板的转动或者球杆座

一种可实现高速运动的五自由度并联机械手.pdf
本发明公开了一种可实现高速运动的五自由度并联机械手,包括固定架、动平台以及对称布置在固定架与动平台之间的五条结构相同的支链,固定架上固接有五个驱动装置;动平台包括两个球杆座、两个相互平行等长的连杆和一中心板;分别构成两组平面平行四边形结构;通过两组齿轮啮合传动机构,将两球杆座相对于中心板的平动或两组平行连杆相对于中心板的转动转化为二自由度手腕的两个动力输入;在驱动装置的作用下,实现动平台三维平动和二自由度手腕的二维转动。本发明整体结构对称,动平台受力均匀,运动部件质量轻,易实现高速运动,可满足复杂抓放操作

一种高速六自由度并联机械手.pdf
本发明公开了一种高速六自由度并联机械手,包括固定架、动平台、三自由度手腕以及布置在固定架与动平台之间的六条结构相同的运动支链;固定架上固接有六个驱动装置;动平台包括一中心板、三个分角齿轮组和六个连杆,每一分角齿轮组包含一个中心锥齿轮、两个分角锥齿轮,中心锥齿轮与中心板转动连接;分角锥齿轮与中心板转动连接,两个分角锥齿轮布置于中心锥齿轮两侧且与中心锥齿轮啮合连接。连杆的一端与下连接轴固连,连杆的另一端与分角齿轮组中的一个分角锥齿轮固连;三自由度手腕固接于中心板上,三自由度手腕周围布置三组齿轮传动机构,三个中

一种高速五自由度并联机械手.pdf
本发明公开了一种高速五自由度并联机械手,包括固定架、动平台、两自由度手腕以及布置在固定架与动平台之间的五条结构相同的支链,五条结构相同的支链带动动平台产生三维平动运动;动平台包括一个中心板、两组分角齿轮组、四个连杆和一个固定连杆;固定连杆和上述四个连杆在中心板上呈径向均布,固定连杆的一端与中心板固接,四个连杆的一端分别与两组分角齿轮组中的分角锥齿轮的转动轴固接,通过两组分角齿轮组与中心锥齿轮的啮合作用,将运动传递给两自由度手腕,从而产生两自由度可控转动。本发明结构对称,受力均匀,运动部件质量小,动态性能较

一种SCARA高速并联机械手.pdf
本发明公开了一种SCARA高速并联机械手,包括底板和第一防护垫,所述底板的顶部设置有第一轴承,且第一轴承的内部连接有活动板,所述活动板的外壁设置有卡板,且卡板的底部预设有第一凹槽,所述第一凹槽的底部预设有第二凹槽,且第二凹槽的内壁设置有卡孔,所述作用箱的内壁连接有第二轴承,且第二轴承的内部贯穿有活动杆,并且活动杆的内部贯穿有转轴,所述转轴的外壁固定有存放箱,且存放箱的内壁预留有卡槽,所述分隔板的底部设置有活性炭层,所述第一防护垫设置于底板的外壁,且第一防护垫的外壁设置有活动轴。本发明,能够快速安装拆卸机械